1、上升时间Tr=0.3/BW,所以BW=0.3/Tr (或者0.35)——这个是示波器最小采样带宽值
2、实际信号最大频率参考简易计算公式,频率拐点Fknee=0.5/Tr,(10%-90%),0.4/Tr(20%-80%)
以下为转载:
示波器带宽≥信号频率x5
这个法则是怎么来的呢?
信号的高频成分都“藏在”上升沿中,例如1MHz的方波,其基频是1MHz,但是还有非常多的倍频部分,是1MHz的N倍,N是无穷大。这个时候我们要提一个“拐点频率”的概念,根据Dr. Howard W. Johnson的著作High Speed Digital Design A Handbook of Black Magic所述,快速边沿的频谱中存在一个转折点,也称“拐点”,在这个转折点之上,高于fknee的频率分量在确定信号形状时可以忽略不计。拐点频率的计算方法如下:
trise指信号的上升时间。
**信号的最高频率成分可以认为就是拐点频率,示波器的带宽应该大于等于这个拐点频率。**还以上面1MHz方波计算,方波升时间通常是周期的1/10,即100ns。那么
刚好就是方波频率的5倍,所以5倍经验法则就是这么来的。
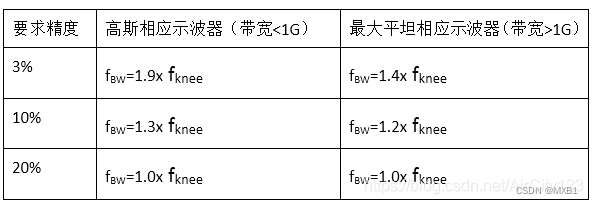
上面是通用的计算方法,如果要求更好的精度,可按照如下规则计算;
高斯相应示波器(带宽<1G) 最大平坦相应示波器(带宽>1G)
————————————————
版权声明:本文为CSDN博主「AirCity123」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/AirCity123/article/details/103944993

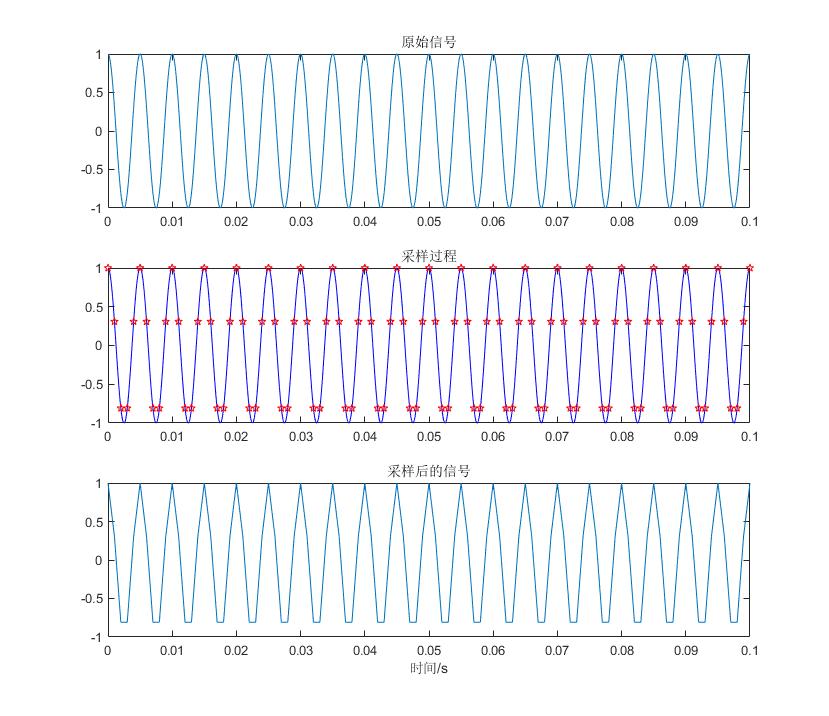
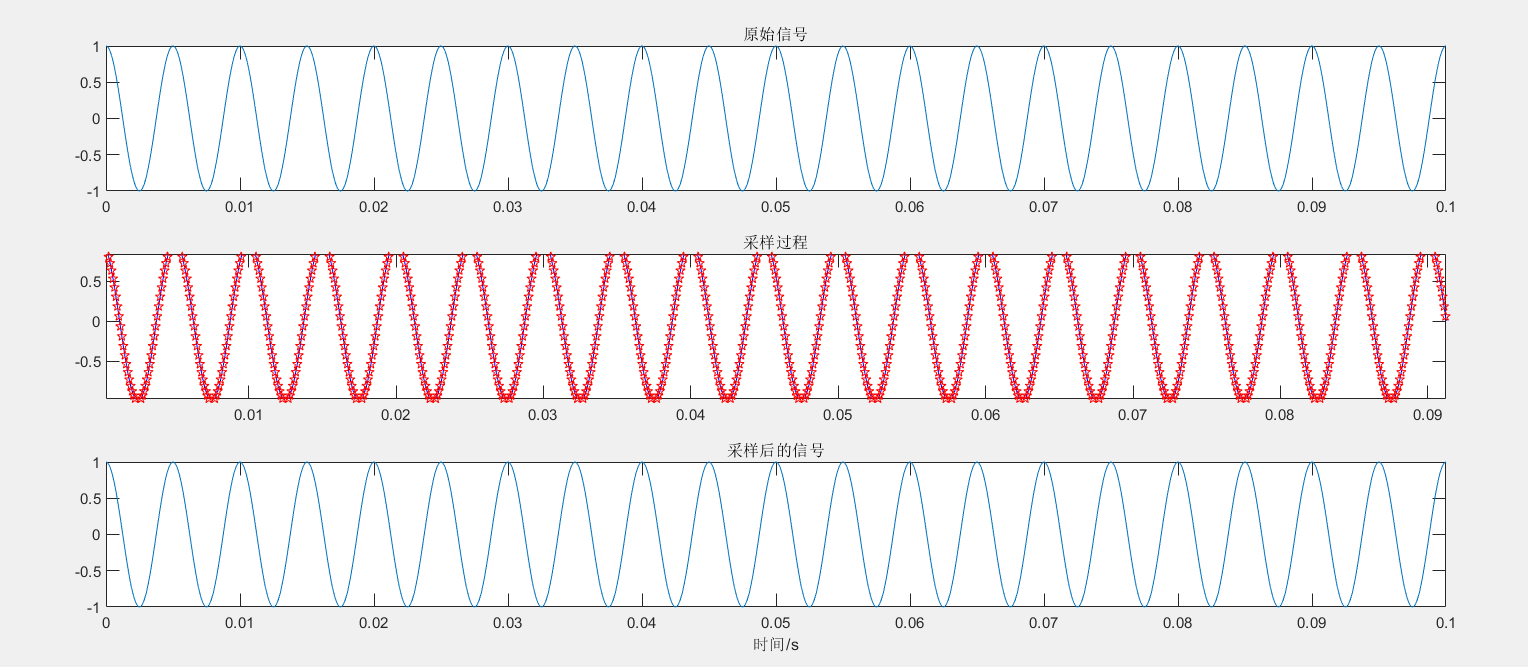
![[信号基础] 信号频率,采样率,采样点(快拍数)等](https://img-blog.csdnimg.cn/afbec0c77b024c7199447da15d6f37d3.png)