原作者: 辰忆书阁
原链接:http://www.360doc.com/myfiles.aspx?reg=1&app=1&type=3
1、频率分辨率的2种解释
解释一:频率分辨率可以理解为在使用DFT时,在频率轴上的所能得到的最小频率间隔f0=fs/N=1/NTs=1/T,其中N为采样点数,fs为采样频率,Ts为采样间隔。所以NTs就是采样前模拟信号的时间长度T,所以信号长度越长,频率分辨率越好。是不是采样点数越多,频率分辨力提高了呢?其实不是的,因为一段数据拿来就确定了时间T,注意:f0=1/T,而T=NTs,增加N必然减小Ts ,因此,增加N时f0是不变的。只有增加点数的同时导致增加了数据长度T才能使分辨率越好。还有容易搞混的一点,我们在做DFT时,常常在有效数据后面补零达到对频谱做某种改善的目的,我们常常认为这是增加了N,从而使频率分辨率变好了,其实不是这样的,补零并没有增加有效数据的长度,仍然为T。但是补零其实有其他好处:
1)使数据N为2的整次幂,便于使用FFT。
2)补零后,其实是对DFT结果做了插值,克服“栅栏”效应,使谱外观平滑化;我把“栅栏”效应形象理解为,就像站在栅栏旁边透过栅栏看外面风景,肯定有被栅栏挡住比较多风景,此时就可能漏掉较大频域分量,但是补零以后,相当于你站远了,改变了栅栏密度,风景就看的越来越清楚了。
3)由于对时域数据的截短必然造成频谱泄露,因此在频谱中可能出现难以辨认的谱峰,补零在一定程度上能消除这种现象。
那么选择DFT时N参数要注意:
1)由采样定理:fs>=2fh,
2)频率分辨率:f0=fs/N,所以一般情况给定了fh和f0时也就限制了N范围:N>=fs/f0。
解释二:频率分辨率也可以理解为某一个算法(比如功率谱估计方法)将原信号中的两个靠得很近的谱峰依然能保持分开的能力。这是用来比较和检验不同算法性能好坏的指标。在信号系统中我们知道,宽度为N的矩形脉冲,它的频域图形为sinc函数,两个一阶零点之间的宽度为4π/N。由于时域信号的截短相当于时域信号乘了一个矩形窗函数,那么该信号的频域就等同卷积了一个sinc函数,也就是频域受到sinc函数的调制了,根据卷积的性质,因此两个信号圆周频率之差W0必须大于4π/N。从这里可以知道,如果增加数据点数N,即增加数据长度,也可以使频率分辨率变好,这一点与第一种解释是一样的。同时,考虑到窗函数截短数据的影响存在,当然窗函数的特性也要考虑,在频率做卷积,如果窗函数的频谱是个冲击函数最好了,那不就是相当于没截断吗?可是那不可能的。
我们考虑窗函数主要是以下几点:
1)主瓣宽度B最小(相当于矩形窗时的4π/N,频域两个过零点间的宽度)。
2)最大边瓣峰值A最小(这样旁瓣泄露小,一些高频分量损失少了)。3.边瓣谱峰渐近衰减速度D最大(同样是减少旁瓣泄露)。在此,总结几种很常用的窗函数的优缺点:
矩形窗:B=4π/N A=-13dB D=-6dB/oct
三角窗:B=8π/N A=-27dB D=-12dB/oct
汉宁窗:B=8π/N A=-32dB D=-18dB/oct
海明窗:B=8π/N A=-43dB D=-6dB/oct
布莱克曼窗:B=12π/N A=-58dB D=-18dB/oct
可以看出,矩形窗有最窄的主瓣,但是旁瓣泄露严重。汉宁窗和海明窗虽主瓣较宽,但是旁瓣泄露少,是常选用的窗函数。
2、采样周期与频率分辨率
fs/N常称作为频率分辨率,它实际是作FFT时谱图中的两条相邻谱线之间的频率间隔,也有称作步长。单位是Hz、Khz等。频率分辨率实际有二重含意,在这里只是其中一种。
1/fs的单位的s、ms、us或分、时...年等。1/fs代表采样周期,是时间域上两个相邻离散数据之间的时间差。
因此fs/N用在频率域,只在DFT以后的谱图中使用;而1/fs用时间域,只要数据经采样,离散化后任何其它的应用中都可使用。例如有的数字滤波器中就用到。
Δf=fs/N=1/T;Δf是频率采样间隔,同时也是频率分辨率的重要指标,如果这个值越小,则频率分辨率越高。
1/fs往往用在求时间序列上,如(0:N-1)*1/fs等等,如果这个不好理解,可以把前面的公式求倒数,这就清楚多了
3、采样定理
采样过程所应遵循的规律,又称取样定理、抽样定理。采样定理说明采样频率与信号频谱之间的关系,是连续信号离散化的基本依据。采样定理是1928年由美国电信工程师H.奈奎斯特首先提出来的,因此称为奈奎斯特采样定理。1933年由苏联工程师科捷利尼科夫首次用公式严格地表述这一定理,因此在苏联文献中称为科捷利尼科夫采样定理。1948年信息论的创始人C.E.香农对这一定理加以明确地说明并正式作为定理引用,因此在许多文献中又称为香农采样定理。采样定理有许多表述形式,但最基本的表述方式是时域采样定理和频域采样定理。采样定理在数字式遥测系统、时分制遥测系统、信息处理、数字通信和采样控制理论等领域得到广泛的应用。
时域采样定理
频带为F的连续信号 f(t)可用一系列离散的采样值f(t1),f(t1±Δt),f(t1±2Δt),...来表示,只要这些采样点的时间间隔Δt≤1/2F,便可根据各采样值完全恢复原来的信号f(t)。

采样定理
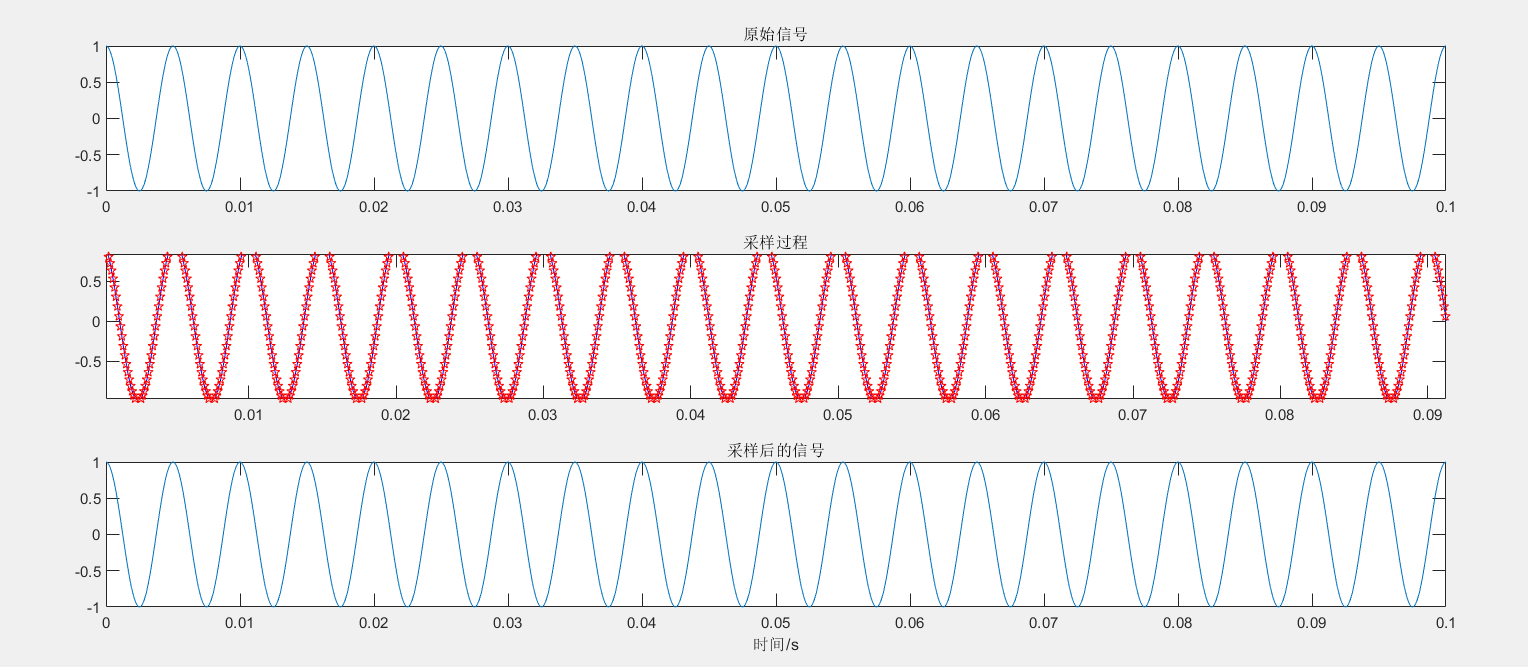
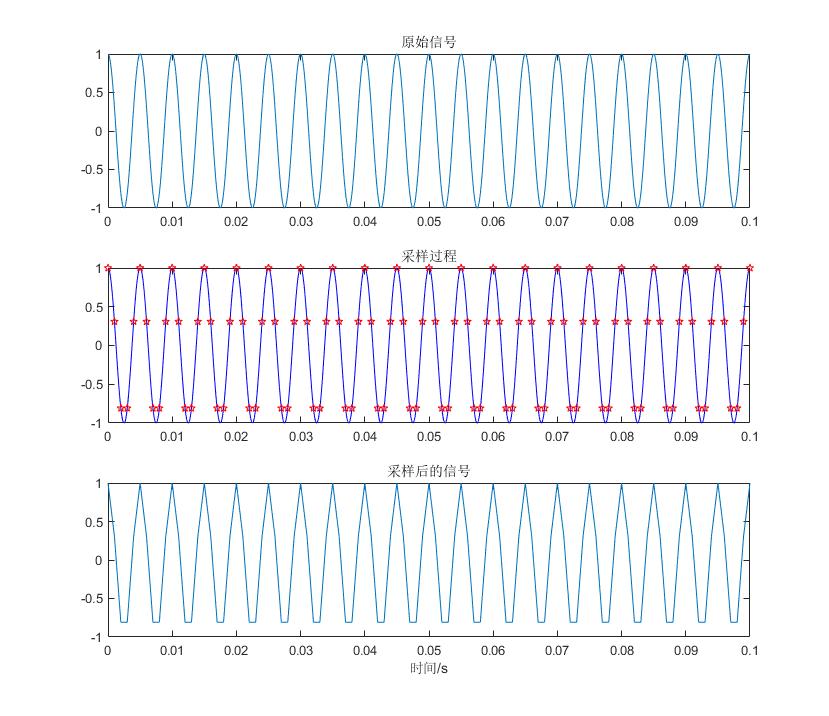
时域采样定理的另一种表述方式是:当时间信号函数f(t)的最高频率分量为fM时,f(t)的值可由一系列采样间隔小于或等于1/2fM的采样值来确定,即采样点的重复频率f≥2fM。图为模拟信号和采样样本的示意图。
时域采样定理是采样误差理论、随机变量采样理论和多变量采样理论的基础。
频域采样定理
对于时间上受限制的连续信号f(t)(即当│t│>T 时,f(t)=0,这里T =T2-T1是信号的持续时间),若其频谱为F(ω),则可在频域上用一系列离散的采样值

4、分析频率/采样点数/谱线数的设置要点
1)最高分析频率:Fm指需要分析的最高频率,也是经过抗混滤波后的信号最高频率。根据采样定理,Fm与采样频率Fs之间的关系一般为:Fs=2.56Fm;而最高分析频率的选取决定于设备转速和预期所要判定的故障性质。
2)采样点数N与谱线数M有如下的关系:
N=2.56M 其中谱线数M与频率分辨率ΔF及最高分析频率Fm有如下的关系:ΔF=Fm/M 即:M=Fm/ΔF 所以:N=2.56Fm/ΔF
★采样点数的多少与要求多大的频率分辨率有关。例如:机器转速3000r/min=50Hz,如果要分析的故障频率估计在8倍频以下,要求谱图上频率分辨率ΔF=1 Hz ,则采样频率和采样点数设置为:
最高分析频率Fm=8·50Hz=400Hz;
采样频率Fs=2.56·Fm=2.56 ·400Hz=1024Hz;
采样点数N=2.56·(Fm/ΔF)=2.56·(400Hz/1Hz)=1024=210
谱线数M=N/2.56=1024/2.56=400条
![[信号基础] 信号频率,采样率,采样点(快拍数)等](https://img-blog.csdnimg.cn/afbec0c77b024c7199447da15d6f37d3.png)