实例:16bit,16K,115200
1.采样位数:
即采样值或取样值(就是将采样样本幅度量化)。它是用来衡量声音波动变化的一个参数,也可以说是声卡的分辨率。它的数值越大,分辨率也就越高,所发出声音的能力越强。
在计算机中采样位数一般有8位和16位之分,但有一点请大家注意,8位不是说把纵坐标分成8份,而是分成2的8次方即256份;
量化信噪比: SNR=6.02n+1.76;具体计算过程参考:量化噪声-知乎
以16bit采样位数为例,dBFS(Full Scale)计算公式:
也就是16bit采样位数的动态范围是
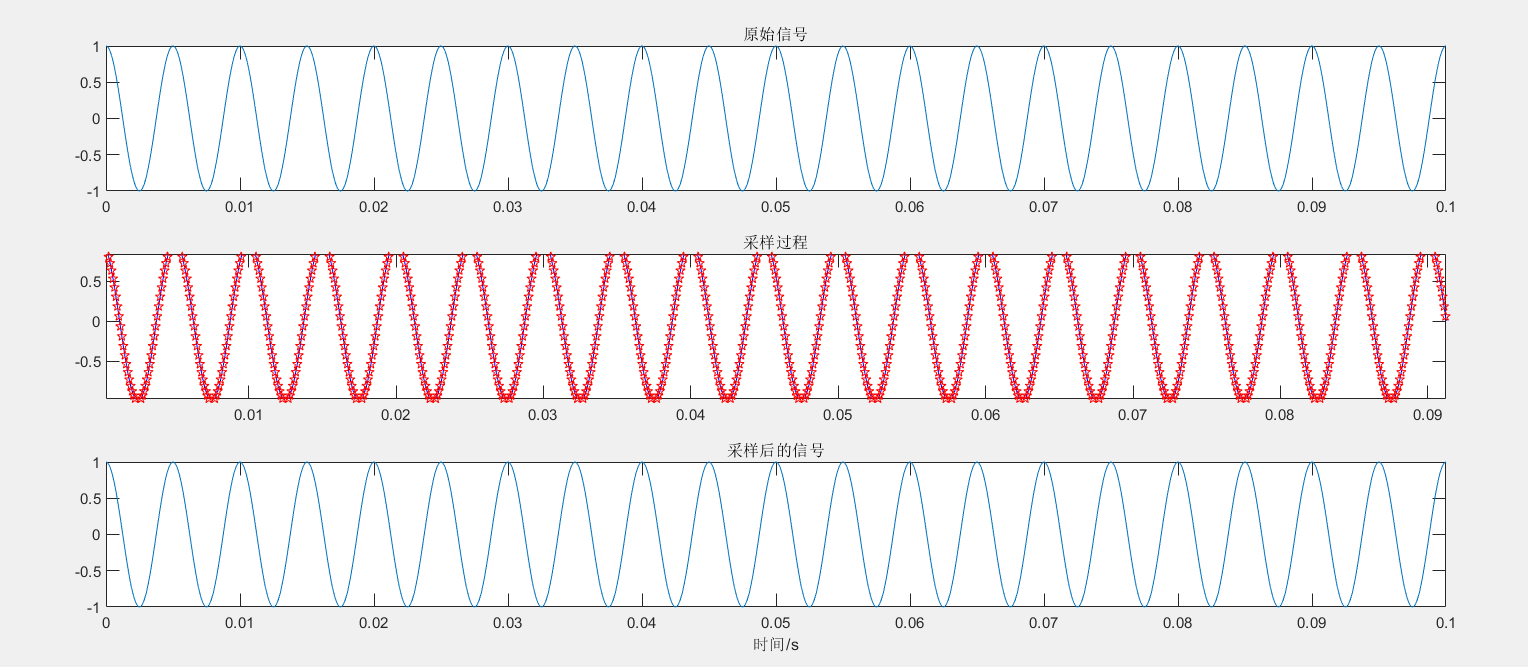
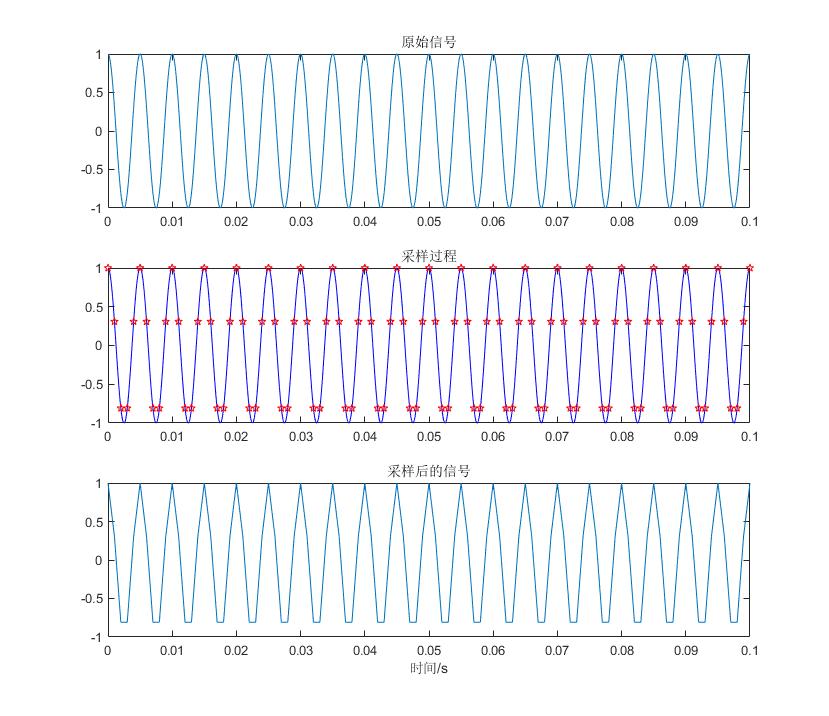
2.采样频率
即取样频率,指每秒钟取得声音样本的次数。采样频率越高,声音的质量也就越好,声音的还原也就越真实,但同时它占的资源比较多。由于人耳的分辨率很有限,太高的频率并不能分辨出来。在16位声卡中有22KHz、44KHz等几级,其中,22KHz相当于普通FM广播的音质,44KHz已相当于CD音质了,目前的常用采样频率都不超过48KHz。
3.波特率
波特(Baud)即调制速率,指的是有效数据讯号调制载波的速率,即单位时间内载波调制状态变化的次数。可以理解为信息传递速率
![[信号基础] 信号频率,采样率,采样点(快拍数)等](https://img-blog.csdnimg.cn/afbec0c77b024c7199447da15d6f37d3.png)