EPEL (Extra Packages for Enterprise Linux) 是由 Fedora Special Interest Group 为企业 Linux 创建、维护和管理的一个高质量附加包集合,适用于但不仅限于 Red Hat Enterprise Linux (RHEL), CentOS, Scientific Linux (SL), Oracle Linux (OL)。
我们可以很容易地通过yum命令从EPEL源上获取上万个在CentOS自带源上没有的软件。EPEL提供的软件包大多基于其对应的Fedora软件包,不会与企业版Linux发行版本的软件发生冲突或替换其文件
EPEL官方介绍:http://fedoraproject.org/wiki/EPEL/zh-cn
EPEL配置:
1.首先配置一个CentOS的源,我这里使用163的源:
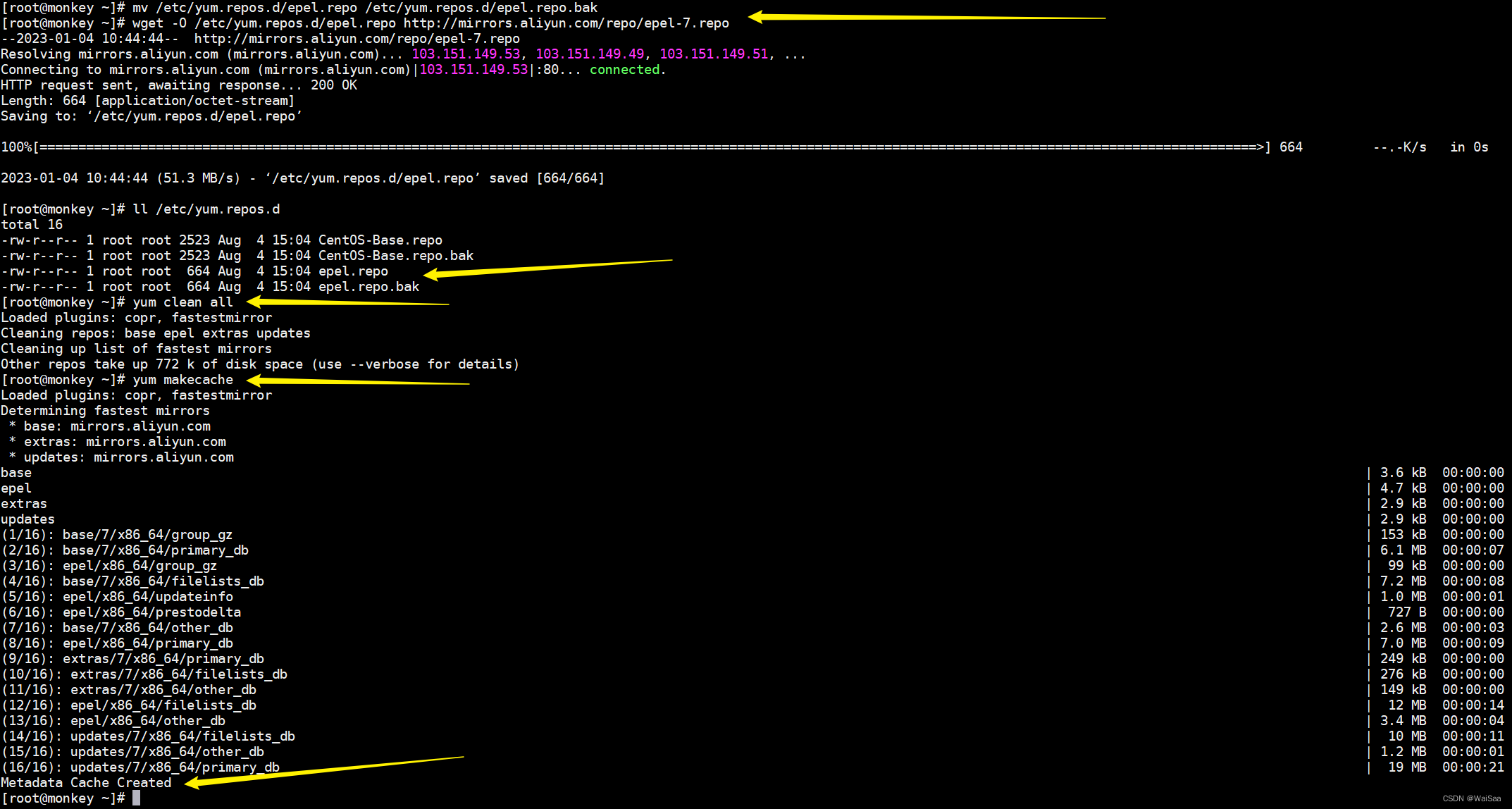
cd /etc/yum.repos.d 下载对应系统版本的repo文件
wget http://mirrors.163.com/.help/CentOS6-Base-163.repo
yum clean all 清理缓存
yum makecache 生成新的缓存
2.安装epel-release.noarch包,上面已经配置好CentOS源,可以直接yum安装:
yum install epel-release
安装完成之后,会在/etc/yum.repo.d/ 目录下生成两个yum源的repo文件:
epel.repo #正式版,所有的软件都是稳定可以信赖的
epel-testing.repo #测试版,使用时需要慎重
但是默认情况下,只有正式版是有效状态的,如果想试试测试版的话,需要修改/etc/yum.repos.d/epel-testing.repo,把enabled=0改成enabled=1即可
epel安装好之后,默认使用的是国外的源(Fedora 官网提供),速度比较慢,如果想要速度快些,可以做下更改,将源更改成国内的源,如中科大(ustc)的EPEL源,执行如下命令即可,详细配置,请见http://mirrors.ustc.edu.cn/help/epel.html
另外还有阿里提供的EPEL源:http://mirrors.aliyun.com/help/epel
由于一共配置了2个源,yum安装软件时,默认优先使用epel的源,如果想要优先使用CentOS的源,可以安装一个优先级插件:yum-plugin-priorities,进行控制调整2个yum源的优先级
yum install yum-plugin-priorities
vim /etc/yum.repo.d/epel.repo 在[epel]里的最后一行添加
priority=88
vim /etc/yum.repo.d/CentOS6-Base-163.repo
在[base]里的最后一行添加priority=6 (这个数要小于epel里的88即可,数字越小优先级越高)