

相关文章
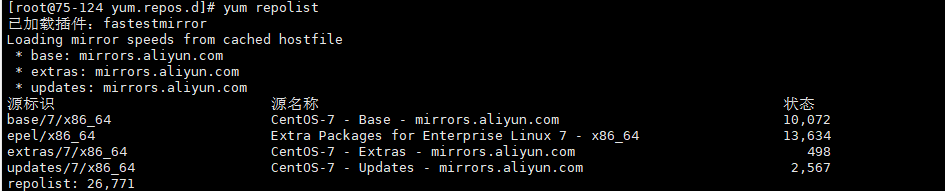
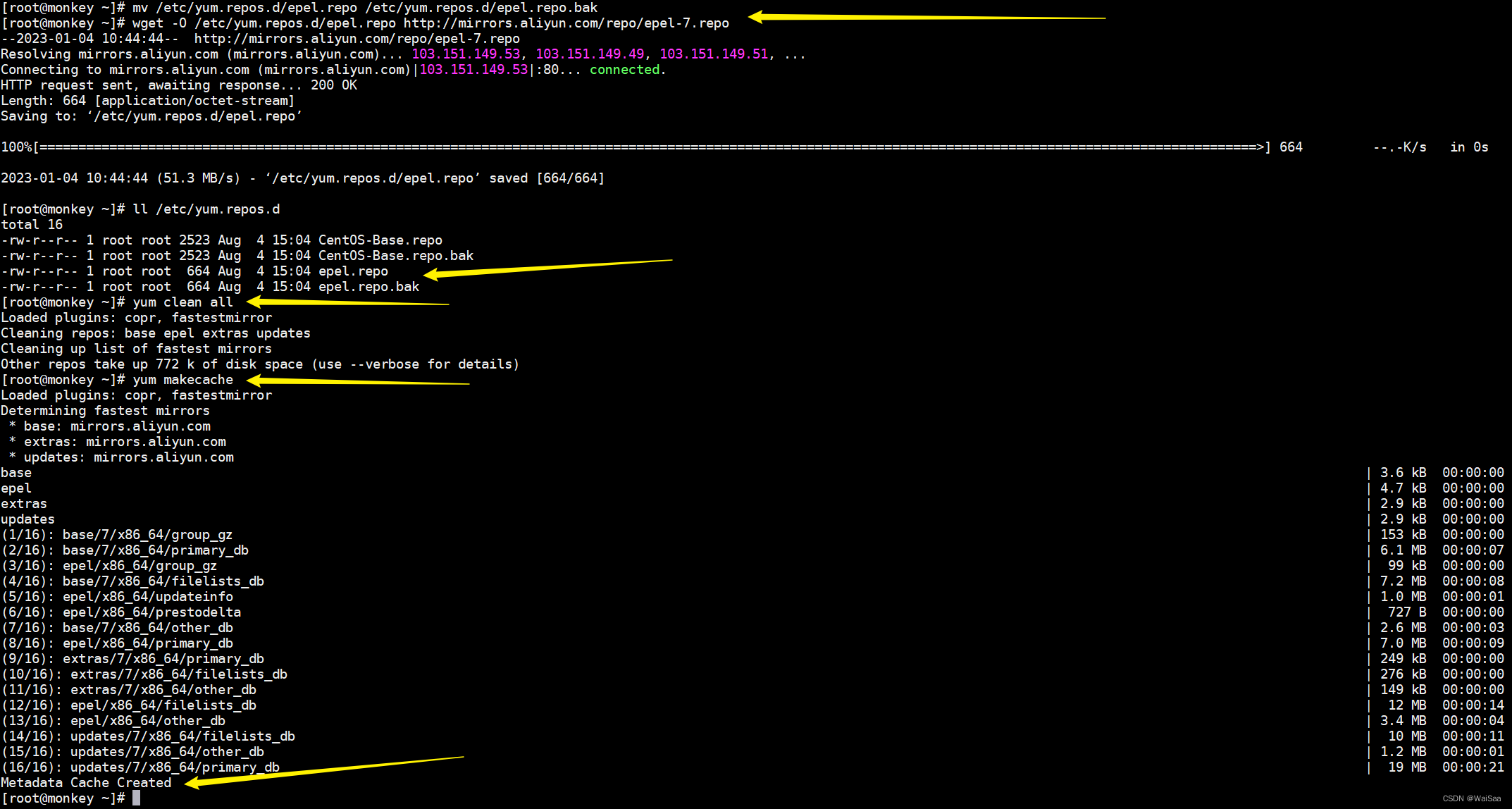
CentOS7 yum源修改为阿里,配置阿里epel源
一、概念/区分:
yum源
什么是yum源: yum是一个在CentOS、RedHat和Fedora操作系统中使用的Shell前端软件包管理器。yum主要管理基于rpm的软件包,Centos先将发布的软件放置到YUM服务器内,然后分析这些软件的依赖属性问题ÿ…

RHEL / CentOS 配置epel源
epel 是什么?
epel的全称叫 Extra Packages for Enterprise Linux。
EPEL 是由 Fedora 社区打造,为 RHEL 及衍生发行版如 CentOS、Scientific Linux 等提供高质量软件包的项目。
装上了 EPEL 之后,就相当于添加了一个第三方源。
为什么需…
Centos7配置阿里云yum源及epel源
Background 踩坑记录吧。下次可以直接复制粘贴,不用再去排查是哪个字母字符少了多了,我这都是执行成功的命令粘贴过来的。 1、基础知识简介
yum: 全称“Yellow dog Updater, Modified”,是一个专门为了解决包的依赖关系而存在的软件包管理器…
Pixhawk RPi CM4 Baseboard 树莓派CM4安装Ubuntu20.04 server 配置ros mavros mavsdk
文章目录 硬件安装Ubuntu Server20.04下载rpiboot工具下载imager刷写系统配置USB配置WIFI 开机安装桌面配置wifi配置串口安装ROS安装mavros安装MAVSDK-PythonInternet设置最后 参考: https://docs.holybro.com/autopilot/pixhawk-baseboards/pixhawk-rpi-cm4-basebo…

Pixhawk系列飞控状态通知
转载自:https://blog.csdn.net/weixin_44917390/article/details/107413663 多旋翼飞行器设计与控制Pixhawk系列飞控状态通知(笔记003)
手可摘星辰不敢高声语 2020-07-17 18:51:23 572 收藏 5
分类专栏: PX4
最后发布:2020-0…
PixHawk飞控和QGroundControl地面站安装调试
QGroundControl下载https://docs.qgroundcontrol.com/master/en/getting_started/download_and_install.html本博主下载及安装的为Mac OSX版本:QGroundControl.dmg.
一、PixHawk飞控配置安装及配置 switch 安全开关; buzzer 蜂鸣器,telem1数传; gpsl2C GPS ,power …

Pixhawk Support Package
一、
https://ww2.mathworks.cn/hardware-support/px4-autopilots.html 二、
https://download.csdn.net/download/jonelly/11504800
此版本的支持包与MatlabR2017a和R2017b兼容。它也工作在MatlabR2018a的外部模式功能的限制。若要使用此支持包,请遵循以下说明&…

树莓派与pixhawk串口通信
一、Pixhawk部分
1.读取数据测试
步骤:
在Firmware/src/modules中添加一个新的文件夹,命名为rw_uart在rw_uart文件夹中创建CMakeLists.txt文件,并输入以下内容:
px4_add_module(MODULE modules__rw_uartMAIN rw_uartCOMPILE_F…
【四旋翼】pixhawk2.4.8-地面站配置-APM固件-四旋翼从装机到试飞
文章目录 整体流程图:相关网址汇总:入门常识:一、硬件准备二、软件准备1 已实飞测试2 MP地面站 任意版本下载:3 APM固件 任意版本下载: 三、飞控校准1 刷固件2 机架选择3 加速度计校准4 指南针校准5 遥控器校准6 飞行模…

TFmini Plus 在开源飞控 pixhawk 上的应用
TFmini Plus 在开源飞控 pixhawk 上的应用
TFmini Plus 可以直接连接 Pixhawk 的串口使用。飞行器可以使用 TFmini Plus 来实现定高或 者避障功能。本文档适用于 pixhawk ArduCopter V3.6.2 或更高版固件(注:雷达在 V3.6.2 及以上 固件使用标准输出格式即可,无需使用 PIX 模…
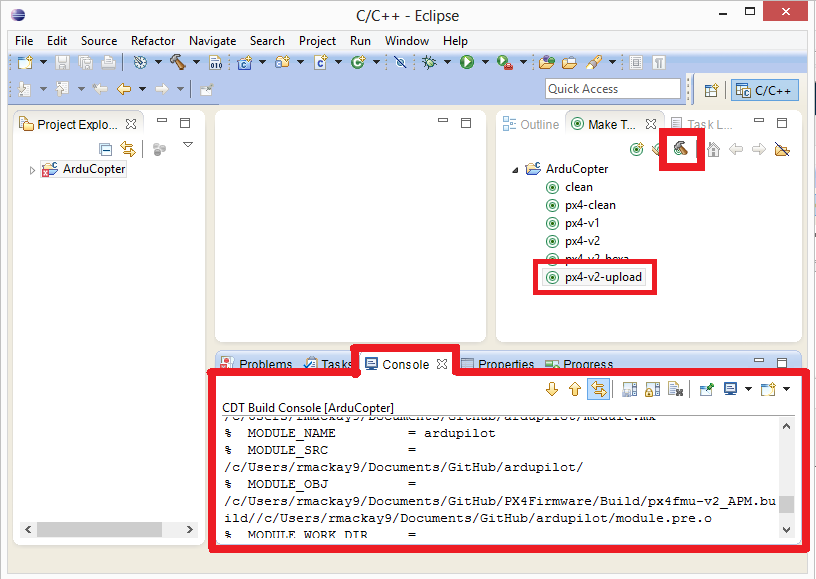
Windows下的pixhawk环境搭建
官网详细介绍:http://ardupilot.org/dev/docs/editing-the-code-with-eclipse.html
提示:GitHub没有写使用过程,如何而简历仓库。具体网上有教程,如果英语好可以去官网自行翻译,安装适合自己操作系统的开发环境&#…
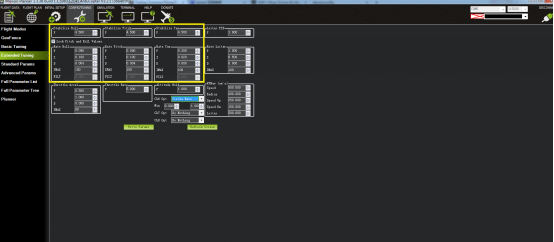
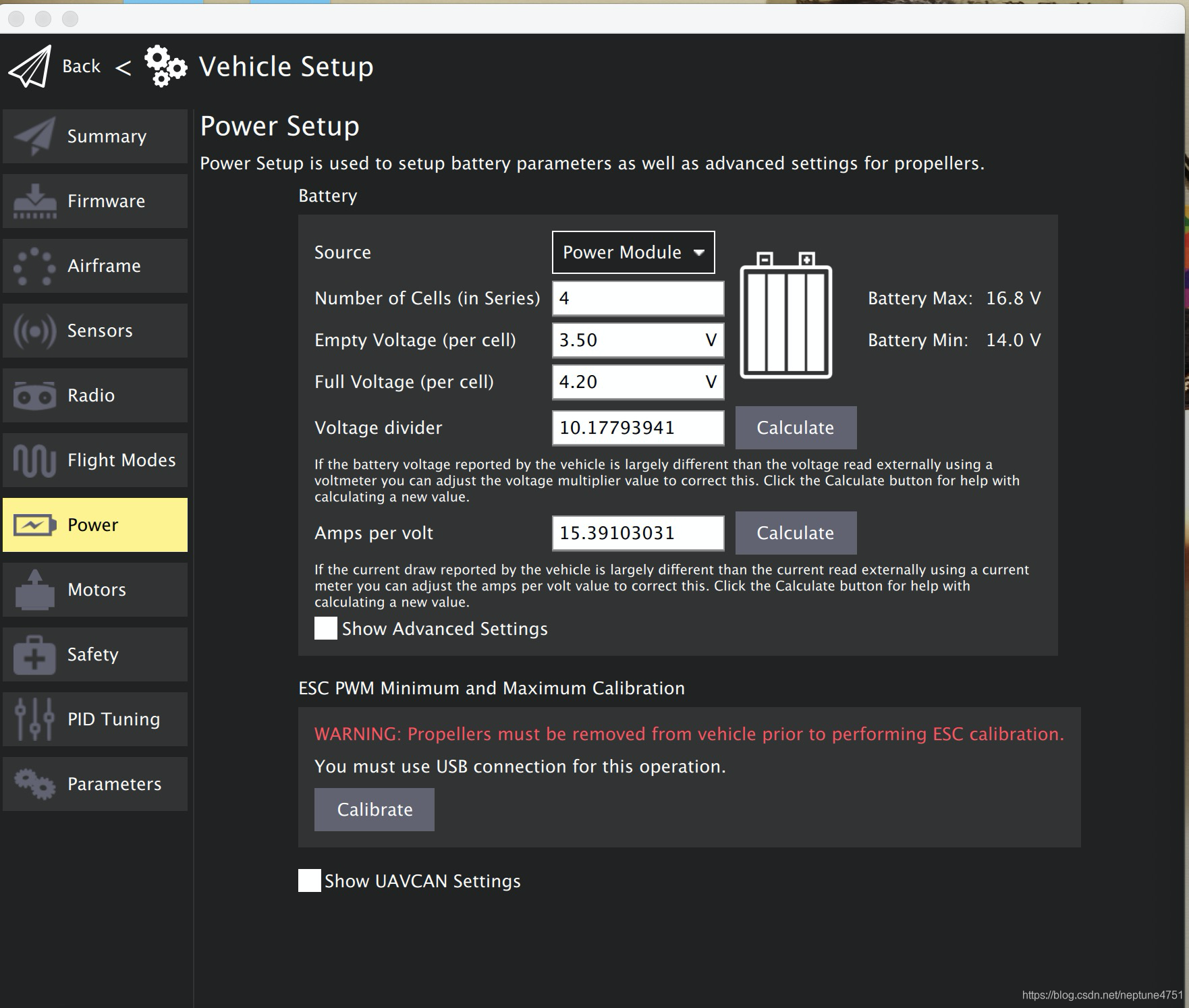
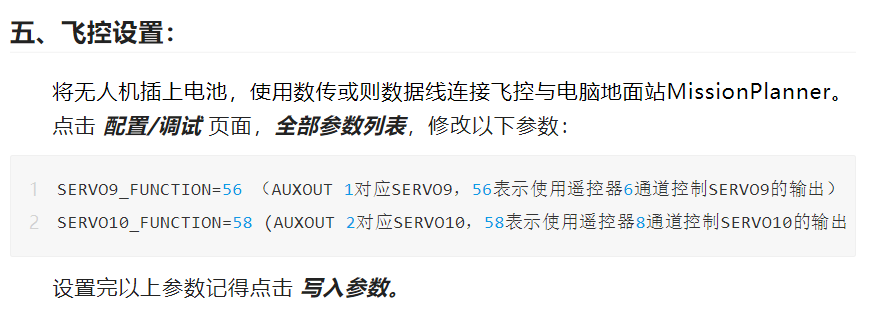
Pixhawk参数调整
Pixhawk copter固件的默认参数是为3DR QUAD COPTER设计的。如果你想获得一个最佳的飞行表现的话。你需要对一些参数做一些调整。调整的参数主要是Extended Tuning下面的Roll和Pitch的PID,来获得稳定的姿态。 在copter的参数调整里边比较重要的参数主要是Roll、Pitch、yaw、…

飞控pixhawk硬件框架
本文转载于:https://blog.csdn.net/csshuke/article/details/78952026  1.Phxhawk连接线路 2.Phxhawk硬件芯片列表 处理器 STM32F427 VIT6 (168 Mhz/256 KB RAM/2 MB 闪存 100Pin)32位 STM32F100C8T6 (48Pin)故障保…
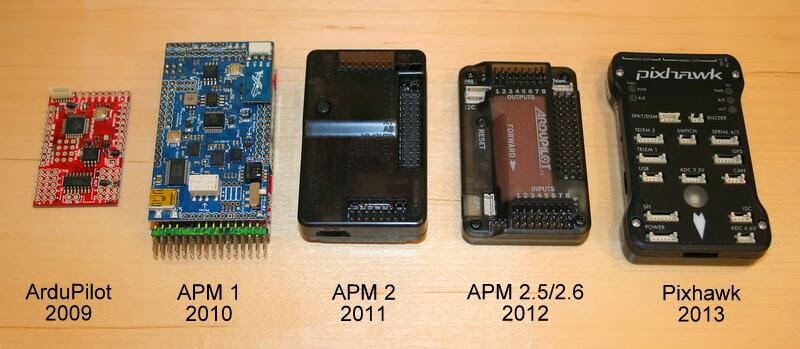
Pixhawk的历史
发展历程:APM-->PX4FMU/IO-->Pixhawk: 1、Arduino简介 Arduino就是主要以以AVR单片机为核心控制器的单片机应用开发板(当然也有其他核心的例如STM32版本的但是不是官方的,还有intel的伽利略),或者是学…
pixhawk 学习笔记
1.pixhawk4硬件:
Main FMU Processor: STM32F765 32 Bit Arm Cortex-M7, 216MHz, 2MB memory, 512KB RAMIO Processor: STM32F100 32 Bit Arm Cortex-M3, 24MHz, 8KB SRAMOn-board sensors: Accel/Gyro: ICM-20689Accel/Gyro: BMI055Magnetometer: IST8310Baromete…

pixhawk计算机无法识别,PIXHAWK教程 3.1.2 连接你的遥控输入和电机(Pixhawk)
连接你的遥控输入和电机(Pixhawk) 目录 连接你的遥控输入和电机(Pixhawk) 连接蜂鸣器和安全开关 连接其他外部设备 连接遥控输入 连接电机输入 安装螺旋桨 顺时针和逆时针桨的识别 连接蜂鸣器和安全开关 蜂鸣器和安全开关依附于Pixhawk。 分别连接到蜂鸣器和开关端口。 连接其他…

pixhawk连接到nvidia xavier
实物是bluerov。固件是ardusub,
https://www.ardusub.com/
上图中右下角蓝usb一端接pixhawk,另外一端接xavier。xavier上运行
$ls /dev/ttyA*
会增加设备/dev/ttyACM0
在xavier端安装好各种mavlink mavproxy 软件包。
$ xargs -a "/home/pcl/mavproxy…
Pixhawk6c编译
以前一直用pixhawk4以及4mini,版本1.11,这两款目前停产,6x也快停产,没什么货源了。只能试试6c。
一:下载
流程:按照官网的流程,先git clone 输入:
git clone https://github.com/…

pixhawk使用WiFi模块
pixhawk使用WiFi 前期准备刷固件安装刷固件软件进入刷固件模式下载固件刷固件 使用接线飞控参数更改使用方法 在使用pixhawk的时候有时候在无人机上不方便搭载处理器,这个时候进行外部控制。或者QGC有线方式连接无人机不方便的时候就需要通过WiFi来连接了。 使用ESP…