EPEL (Extra Packages for Enterprise Linux)是基于Fedora的一个项目,为“红帽系”的操作系统提供额外的软件包,适用于RHEL、CentOS和Scientific Linux.
使用很简单:
1. 首先我们需要安装一个叫”epel-release”的软件包,这个软件包会自动配置yum的软件仓库。当然你也可以不安装这个包,自己配置软件仓库也是一样的。
#用于RHEL5系列
wget http://download.fedoraproject.org/pub/epel/5/i386/epel-release-5-4.noarch.rpm rpm -ivh epel-release-5-4.noarch.rpm
#用于RHEL6系列
wget http://download.fedoraproject.org/pub/epel/6/i386/epel-release-6-5.noarch.rpm rpm -ivh epel-release-6-5.noarch.rpm
2. 安装完成之后你就可以直接使用yum来安装额外的软件包了
yum clean allyum makecache yum install nginx pure-ftpd
3.直接自己手工添加软件仓库配置文件

vi /etc/yum.repos.d/epel.repo[epel] name=epel mirrorlist=http://mirrors.fedoraproject.org/mirrorlist?repo=epel-releasever&arch=releasever&arch=basearch enabled=1 gpgcheck=0
CentOS6.5添加阿里云的EPEL源
yum localinstall --nogpgcheck http://mirrors.aliyun.com/epel/6/x86_64/epel-release-6-8.noarch.rpm
安装阿里云EPEL源
1、 首先卸载以前装的epel以免影响
rpm -e epel-release
2、 下载阿里提供的epel
wget -P /etc/yum.repos.d/ http://mirrors.aliyun.com/repo/epel-6.repo
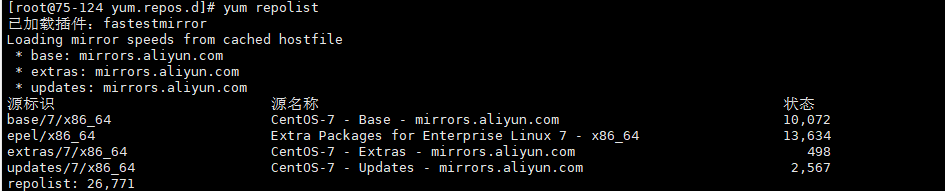
3、yum clean all
4、yum makecache
阿里云源安装示例:
Epel
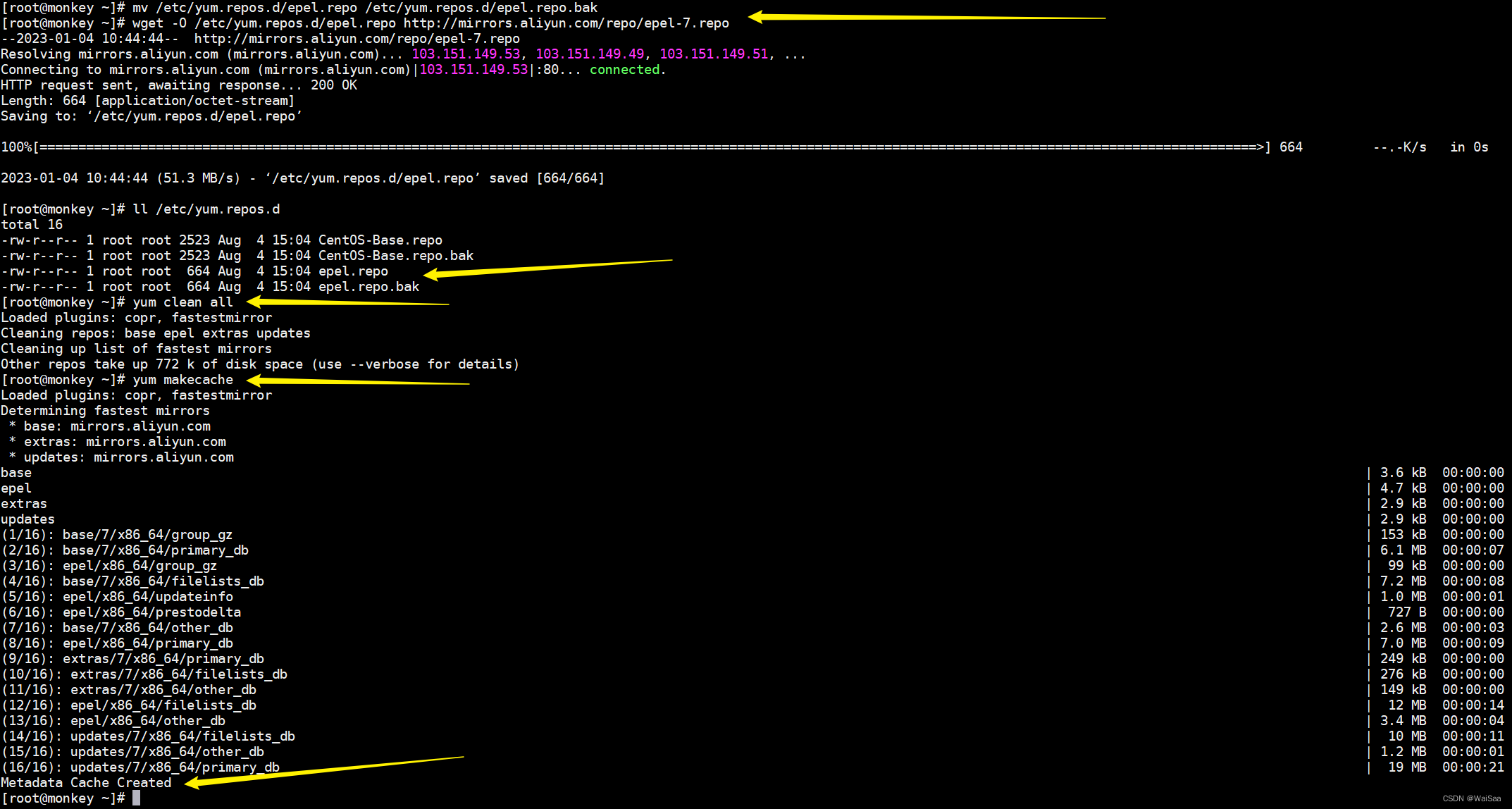
1、备份(如有配置其他epel源)
mv /etc/yum.repos.d/epel.repo /etc/yum.repos.d/epel.repo.backupmv /etc/yum.repos.d/epel-testing.repo /etc/yum.repos.d/epel-testing.repo.backup
2、下载新repo 到/etc/yum.repos.d/
epel(RHEL 7)
wget -O /etc/yum.repos.d/epel.repo http://mirrors.aliyun.com/repo/epel-7.repo
epel(RHEL 6)
wget -O /etc/yum.repos.d/epel.repo http://mirrors.aliyun.com/repo/epel-6.repo
epel(RHEL 5)
wget -O /etc/yum.repos.d/epel.repo http://mirrors.aliyun.com/repo/epel-5.repo