关于ADC采样的采样频率,采样时间的问题:(我目前的想法)
一例题开讲:
信号源为5KHZ的正弦波(一个周期),(就已知周期为200us)。
要求:完整的输出这个正弦波(周期无数)。
首先要确定采样频率,即一个周期采多少点,平均每两点的间隔频率就是采样频率。假设我采200个点,也就是两点间隔为1us,那采样频率就是1M。
这里注意ADC时钟最大为36MHZ,你的采样两点间隔时间最好大于adc的转换时间
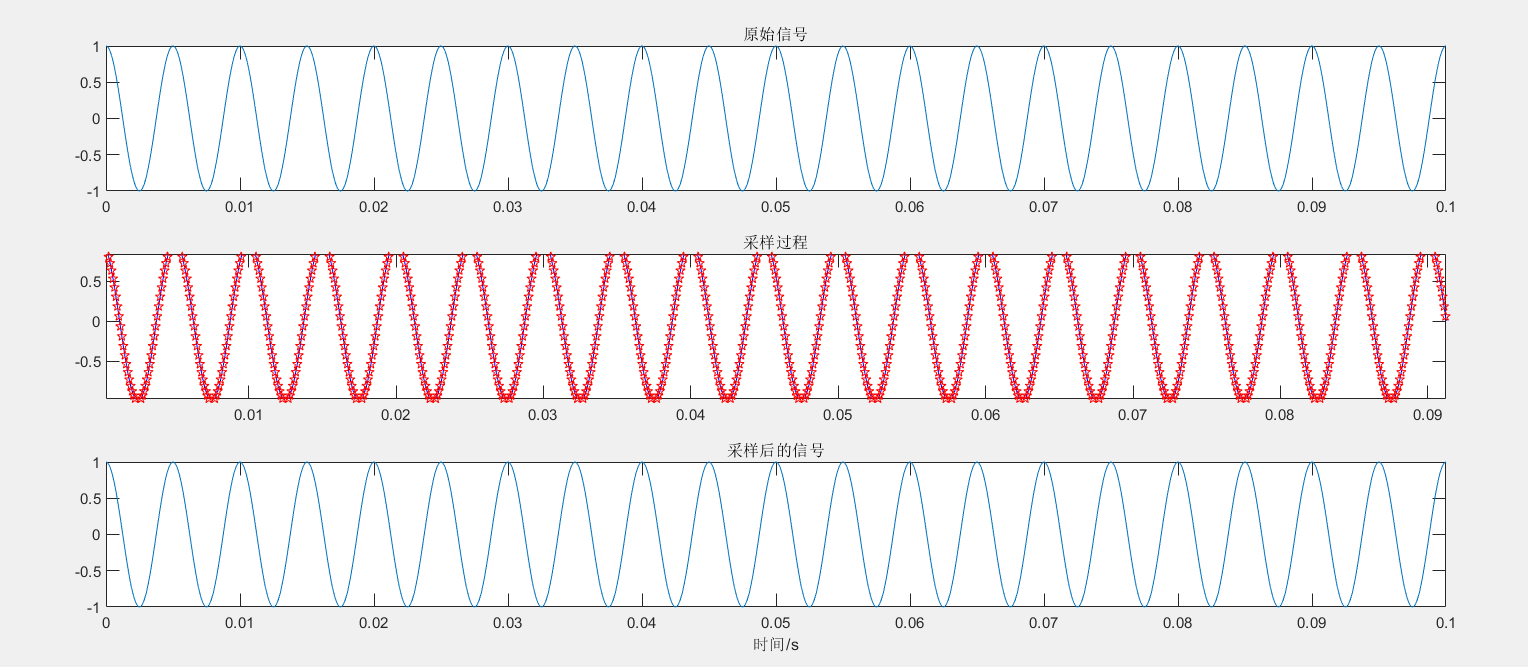
看图理解一下:
在这里插入图片描述
要等转化结束后我们再去采下一个点。
这里就要涉及到了ADC的转换时间了,看图理解

从这两张图可以看出
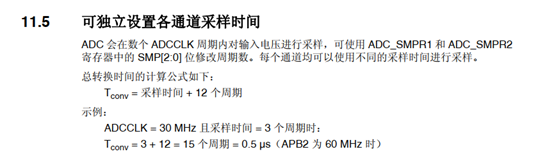
转换时间=采样时间+12个周期,其实这个12个周期是由精确度决定的
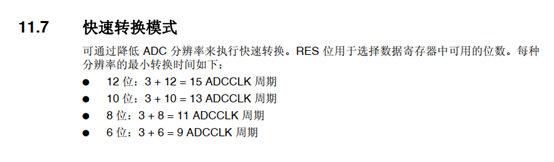
我们算一下一下采12位的数据ADC最小转换时间:15个ADC时钟周期*每个时钟时间,即
(3+12)x1000000us/36000000hz=0.4167us(个人建议转换时间不要太小了,1us就好了,这里提一下:采样时间越长精度越高,这里的36MHZ是ADC时钟频率,用的是ADC时钟的周期,所以分母是36)
我们已经设置好采样间隔时间了,接下来就是时设置转换时间了,前面说了你的采样两点间隔时间最好大于adc的转换时间,现在采样两点间隔时间是1us,你只要设置成小于1us就行了,我设置的是15(采样时间,可以设置)+12个周期,adc时钟频率为30MHZ,27/30小于1,符合要求。(采用定时器触发,设置时钟频率为30Mhz,这里用的是定时器的周期,所以分母是30)
最后就是配好定时器为采样频率就行了。我们要完整采好这个一周期的波,200us对应200个点,我们只要设置每1us(两点间的时间间隔)重装载更新事件就好了。
分析一下:由于ADC转换时间小于间隔时间,所以在间隔时间段内模拟数据已经转换为数字量了,不会影响到我下次采样了,如果ADC转换时间大于间隔时间,由于没转换完可能数据会出错(具体情况就不知道了,可能会导致实际采样频率不对)
总结一下:
步骤:1.假设好采样频率————>2.配置好ADC转换时间小于两点间隔时间
————>3.配置好定时器重装载更新事件频率为采样频率
对于直接用ADC采样,而不用定时器,转换时间就是两点间隔时间了,即采样频率为“1/转换时间”(个人不推荐使用,不好调时间)。
以上就是本人对ADC采样的采样频率,采样时间的理解,如有不对还请在评论区指出。
纯手打,如对您有用还请留下浏览的痕迹,谢谢。【微笑】
![[信号基础] 信号频率,采样率,采样点(快拍数)等](https://img-blog.csdnimg.cn/afbec0c77b024c7199447da15d6f37d3.png)