转载自:https://blog.csdn.net/weixin_44917390/article/details/107413663
多旋翼飞行器设计与控制·Pixhawk系列飞控状态通知(笔记003)
手可摘星辰不敢高声语 2020-07-17 18:51:23 572 收藏 5
分类专栏: PX4
最后发布:2020-07-17 18:51:23首次发布:2020-07-17 18:51:23
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
本文链接:https://blog.csdn.net/weixin_44917390/article/details/107413663
版权
笔全部都来自于:(px4官网)飞行状态注意事项
PX4提供基于机载视觉(LED)和声音(蜂鸣器)的高级飞行状态和飞行准备提示。
例如,这些提示
- 表明飞行器是否正确校准
- 是否有SD卡
- 是否有位置锁定
- 是否可以安全靠近
- 是否解锁
- 是否可以起飞
- ……
此外,PX4在地面站的起飞前检查中提供更详细的关于起飞准备的信息
一、LED含义
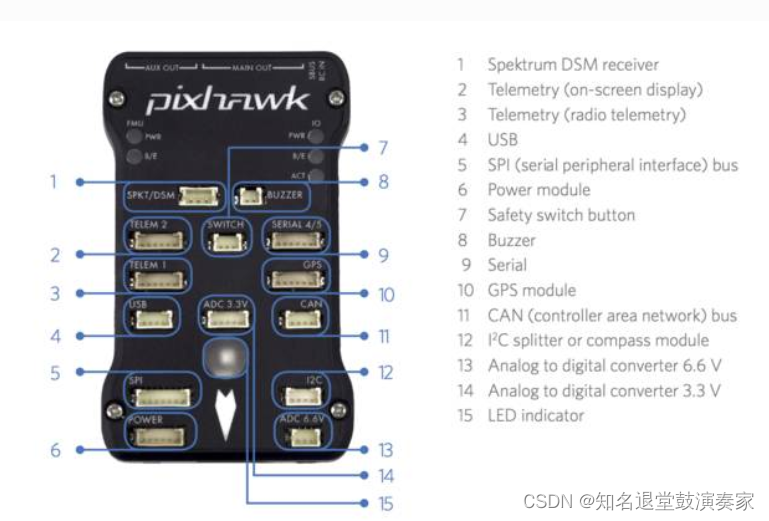
Pixhawk系列飞行控制器 使用LED来显示当前飞行器的状态
- UI LED 提供了与 起飞准备相关的面向用户的状态信息
- LEDs状态 提供PX4IO 和 FMU SoC的状态。 它们表示电量、驱动模式和活动以及错误
1、UI LED
RGB UI LED显示当前 飞行器起飞准备 的状态。 这通常是一个超亮的I2C外设,可能安装在飞控板上(例如,FMUv4飞控板上没有,通常使用安装在GPS上的LED)。
可能有GPS锁 (LED指示灯为绿色) 并且无法解锁飞机,因为PX4还没有 通过起飞前检测。 起飞需要有效的全球位置估计!
在遇到错误 (红色LED闪烁), 或者飞行器无法解除GPS锁 (LED从蓝色变为绿色) 时, 查看QGroundControl中详细的状态信息包括校准状态,在 飞行前检查(内部)时会报告错误信息。 还要检查GPS模块是否正确连接,Pixhawk是否正确读取GPS信息,GPS是否发送正确的GPS位置。
[蓝色LED常亮] 解锁, GPS未锁定: 表上飞行器已经解锁并且GPS模块没有位置锁。 当飞行器已经解锁,PX4会解锁对电机的控制,允许你操纵无人机飞行。 像往常一样,在解锁时要小心,因为大型螺旋桨在高速旋转时可能很危险。 飞行器在这种模式下无法执行引导任务。
[蓝色LED闪烁] 未解锁, 没有GPS锁: 与之前类似,但是你的飞行器没有解锁。 这意味着你将不能控制电机,但是其他子系统正在工作。
[绿色LED常亮] 解锁,GPS锁定: 表示飞行器已经解锁,但是GPS模块有位置锁。 当飞行器解锁,PX4将会解锁对电机的控制,允许你操纵无人机飞行。 像往常一样,在解锁时要小心,因为大型螺旋桨在高速旋转时可能很危险。 在这种模式下,飞行器可以执行引导任务。
[绿色LED闪烁] 未解锁,GPS锁定: 与之前类似,但是你的飞行器没有解锁。 这意味着你将无法控制电机,但是其他子系统包括GPS位置锁正在工作。
[紫色LED闪烁] 故障保护模式: 当你的飞行器在飞行时遇到问题,此模式将激活,比如飞行器失去手动控制、电量过低或内部错误。 在故障保护模式时,飞行器将试图返回起飞位置,或者降落在当前位置。
[黄褐色LED常亮] 低电量警告: 表示飞行器电量极低。 在某一点之后,飞行器将进入故障保护模式。 但是,此模式警告此次飞行应该结束。
[红色LED闪烁] 错误/设置需要: 表示飞行器在飞行前需要配置或校准。 将飞行器连接到地面站以找出问题所在。 如果您已经完成设置过程,飞行器仍然闪烁红色,这表明还有其他错误。
2、LED状态
三种LED状态 提供FMU SoC的状态,另外三个提供 PX4IO 的状态(如果存在)。
它们它们表示电量、驱动模式和活动以及错误。

从上电开始,FMU和PX4IO的CPU首先运行引导程序(BL) 然后运行程序(APP)
下表显示引导程序和APP使用如何使用LED来显示状态。
| 颜色 | 标签 | 引导加载程序使用 | APP使用 |
|---|---|---|---|
| 蓝色 | ACT(激活) | 引导加载程序接收数据的时候闪烁 | 表示ARM状态 |
| 红色/琥珀色 | B/E(在引导加载程序/错误) | 在引导加载程序时闪烁 | 表示错误状态 |
| 绿色 | PWR(电源) | 引导加载程序不使用 | 表示ARM状态 |
上面所列的LED标签是常用的,但是在一些飞控板上有所不同。
下面给出了LED更详细的信息(“x”表示任意状态)
| 红色/琥珀色 | 蓝色 | 绿色 | 含义 |
|---|---|---|---|
| 10Hz | x | x | Overload CPU load > 80%, or RAM usage > 98% |
| OFF | x | x | Overload CPU load <= 80%, or RAM usage <= 98% |
| NA | OFF | 4 Hz | actuator_armed->armed && failsafe |
| NA | ON | 4 Hz | actuator_armed->armed && !failsafe |
| NA | OFF | 1 Hz | !actuator_armed-> armed && actuator_armed->ready_to_arm |
| NA | OFF | 10 Hz | !actuator_armed->armed && !actuator_armed->ready_to_arm |
二、蜂鸣器含义
Pixhawk系列飞控 使用蜂鸣器 LED 来显示飞机的飞行状态和飞行事件(比如,解锁是否成功,低电量警告)。
下面列出一组标准蜂鸣器声音。
打开网页对照声音:蜂鸣器含义(Pixhawk系列)
启动声音、启动错误声音、创建文件系统、格式化失败、执行px4IO、执行px4IO成功、px4IO程序失败、操作错误声音、操作正常通知声音、中立通知声音、负面通知声音、加锁警告、加锁失败声音、电池低电量警告、电量消耗过快警告、GPS信号弱警告、降落伞释放、EKF警告、气压警告、蜂鸣器响一声、Home Set Tune
三、飞行前传感器/估算器检查
PX4 执行很多飞行前传感器质量和估算器检查,以确定是否有足够好的位置估计来解锁和驾驶飞行器(这些检查由 COM*ARM* 参数控制)。
任何飞行前错误都会在QGroundControl中报告为
PREFLIGHT FAIL消息。在日志中的
estimator_status.gps_check_fail_flags消息还显示了 GPS 质量检查失败。
EKF 飞行前检查 / 错误
什么是ECL EKF?
估计和控制库(ECL)使用扩展卡尔曼滤波器(EKF)算法来处理传感器测量并提供以下状态的估计值:
- 四元数定义了从北,东,下局部土框架到X,Y,Z体框架的旋转
- IMU的速度-北,东,下(m / s)
- 在IMU上的位置-北,东,下(m)
- IMU增量角度偏差估算-X,Y,Z(弧度)
- IMU增量速度偏差估算-X,Y,Z(m / s)
- 地磁场分量-北,东,下(高斯)
- 车身框架磁场偏置-X,Y,Z(高斯)
- 风速-北,东(m / s)
EKF在延迟的“融合时间范围”上运行,以允许每次测量相对于IMU的不同时间延迟。每个传感器的数据都被FIFO缓冲并由EKF从缓冲区中检索出来,以便在正确的时间使用。每个传感器的延迟补偿由EKF2 _ * _ DELAY参数控制。
补充滤波器用于使用缓冲的IMU数据将状态从“融合时间范围”传播到当前时间。该滤波器的时间常数由EKF2_TAU_VEL和EKF2_TAU_POS参数控制。
EFK报道的下面的这些错误(相关的检查和参数)同时会传入到QGC中:
PREFLIGHT FAIL: EKF HGT ERROR:
- 当 IMU 和高度测量数据不一致时会产生此错误。
- 执行加速度计和陀螺仪校准并重新启动飞行器。 如果错误仍然存在,请检查高度传感器数据是否存在问题。
- 检查由COM_ARM_EKF_HGT参数控制。
PREFLIGHT FAIL: EKF VEL ERROR:
- 当 IMU 和 GPS 速度测量数据不一致时会产生此错误。
- 检查 GPS 速度数据是否存在不真实的数据跳转。 如果 GPS 质量看起来没有问题,请执行加速度计和陀螺仪校准并重新启动飞行器。
- 检查由COM_ARM_EKF_VEL参数控制。
PREFLIGHT FAIL: EKF HORIZ POS ERROR:
- 当 IMU 和位置测量数据(GPS 或外部视觉)不一致时会产生此问题。
- 检查位置传感器数据是否存在不真实的数据跳转。 如果数据质量看起来不错,请执行加速度计和陀螺仪校准并重新启动飞行器。
- 检查由COM_ARM_EKF_POS参数控制。
PREFLIGHT FAIL: EKF YAW ERROR:
- 当使用陀螺仪数据估计的偏航角和来自磁力计或外部视觉系统的偏航角不一致时,产生该误差。
- 检查 IMU 数据是否存在较大的偏航率漂洗,并检查磁力计的对准和校准。
- 检查由 COM_ARM_EKF_YAW 参数控制
- 默认值0.5允许导航偏航角和磁偏航角(磁力计或外部视觉)之间的差异不超过EKF所允许的最大值的50%,并且为飞行开始时的误差增加提供了一定的余量。
- 如果偏航陀螺仪具有较大的偏移量,或者如果车辆在磁干扰或磁力计校准不良的情况下移动或旋转,则可能会失败。
PREFLIGHT FAIL: EKF HIGH IMU ACCEL BIAS:
- 当 EKF 估计的 IMU 加速度计偏差过大时,会产生此错误。
- 检查由COM_ARM_EKF_AB参数控制。
PREFLIGHT FAIL: EKF HIGH IMU GYRO BIAS:
- 当由 EKF 估计的 IMU 陀螺仪偏差过大时会产生该错误。
- 检查由COM_ARM_EKF_GB参数控制。
PREFLIGHT FAIL: ACCEL SENSORS INCONSISTENT - CHECK CALIBRATION:
- 当来自不同 IMU 单元的加速度测量值不一致时,会产生此错误消息。
- 此检查仅适用于具有多个 IMU 的板。
- 检查由COM_ARM_IMU_ACC参数控制。
PREFLIGHT FAIL: GYRO SENSORS INCONSISTENT - CHECK CALIBRATION:
- 当来自不同 IMU 单元的角速率测量值不一致时,会产生此错误消息。
- 此检查仅适用于具有多个 IMU 的板。
- 检查由COM_ARM_IMU_GYR参数控制。
PREFLIGHT FAIL: COMPASS SENSORS INCONSISTENT - CHECK CALIBRATION:
- 当来自不同指南针传感器的测量值差异太大时,会产生此错误消息。
- 这表明校准,定向或电磁干扰不良。
- 该检查仅适用于连接了多个指南针/磁力计的情况。
- 检查由 COM_ARM_MAG_ANG 参数控制
PREFLIGHT FAIL: EKF INTERNAL CHECKS:
- 如果水平GPS速度、磁偏航、垂直GPS速度或垂直位置传感器(默认为Baro,但如果使用非标准参数,可能是测距仪或GPS)的创新幅度过大,则会产生此错误信息。创新之处在于由惯性导航计算预测的数值与由传感器测量的数值之间的差异。
- 用户应检查日志文件中的创新级别以确定原因。 这些可以在ekf2_innovations消息下找到。 常见问题/解决方案包括:
- IMU在预热时漂移。 可以通过重新启动自动驾驶仪来解决。 可能需要IMU加速和陀螺仪校准。
- 邻近的磁干扰与车辆运动相结合。解决我的移动车辆,等待或重新供电。
- 磁力计校准不正确并伴有车辆运动。 通过重新校准解决。
- 启动时的初始冲击或快速移动导致了不良惯性导航解决方案。解决方法是重新启动车辆,在前5秒尽量减少移动。
其他参数
以下参数也会影响飞行前检查
COM_ARM_WO_GPS
COM_ARM_WO_GPS参数控制在没有全局位置估计的情况下是否允许解锁