8种机械键盘轴体对比
本人程序员,要买一个写代码的键盘,请问红轴和茶轴怎么选?
EPEL (Extra Packages for Enterprise Linux) 是Fedora小组维护的一个软件仓库项目,为RHEL/CentOS提供他们默认不提供的软件包。这个源兼容RHEL以及像CentOS和Scientific Linux这样的衍生版本。
EPEL源包含了许多高质量的软件,大部分软件的依赖包也可以在EPEL里找到。有了它,我们不用再为软件/依赖包缺失而苦恼啦。
安装
命令安装
EPEL源的安装非常简单,只需一条yum命令就可以安装啦。
这个包在CentOS Extras repository里面,默认是启用的。$ sudo yum install epel-release
手动安装
当然,我们也可以手动安装:
Step 1 检查redhat版本$ cat /etc/redhat-release
uname也可以,只要知道当前系统架构(i386/x86_64)与系统版本(CentOS-5/6/7)就可以啦。
Step 2 安装EPEL包
前往EPEL官方网站,获取最新版本的rpm包。
下载完rpm包后,安装上就可以啦。$ sudo rpm -ivh
Step 3 检验EPEL源
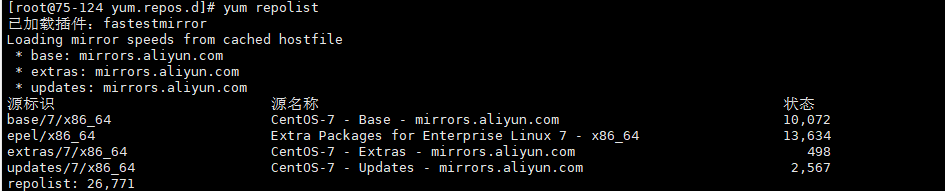
执行以下命令查看yum仓库:$ yum clean all && yum repolistLoaded plugins: fastestmirror
Cleaning repos: base epel extras updates
Cleaning up everything
Cleaning up list of fastest mirrors
Loaded plugins: fastestmirror
Determining fastest mirrors
* base: mirrors.163.com
* epel: mirrors.ustc.edu.cn
* extras: mirrors.163.com
* updates: mirrors.njupt.edu.cn
repo id repo name status
base/7/x86_64 CentOS-7 - Base 9,363
epel/x86_64 Extra Packages for Enterprise Linux 7 - x86_64 11,787
extras/7/x86_64 CentOS-7 - Extras 380
updates/7/x86_64 CentOS-7 - Updates 1,851
repolist: 23,381
可以看到,EPEL源已经被添加上了,仓库里多了好多的软件呐!
手动安装?
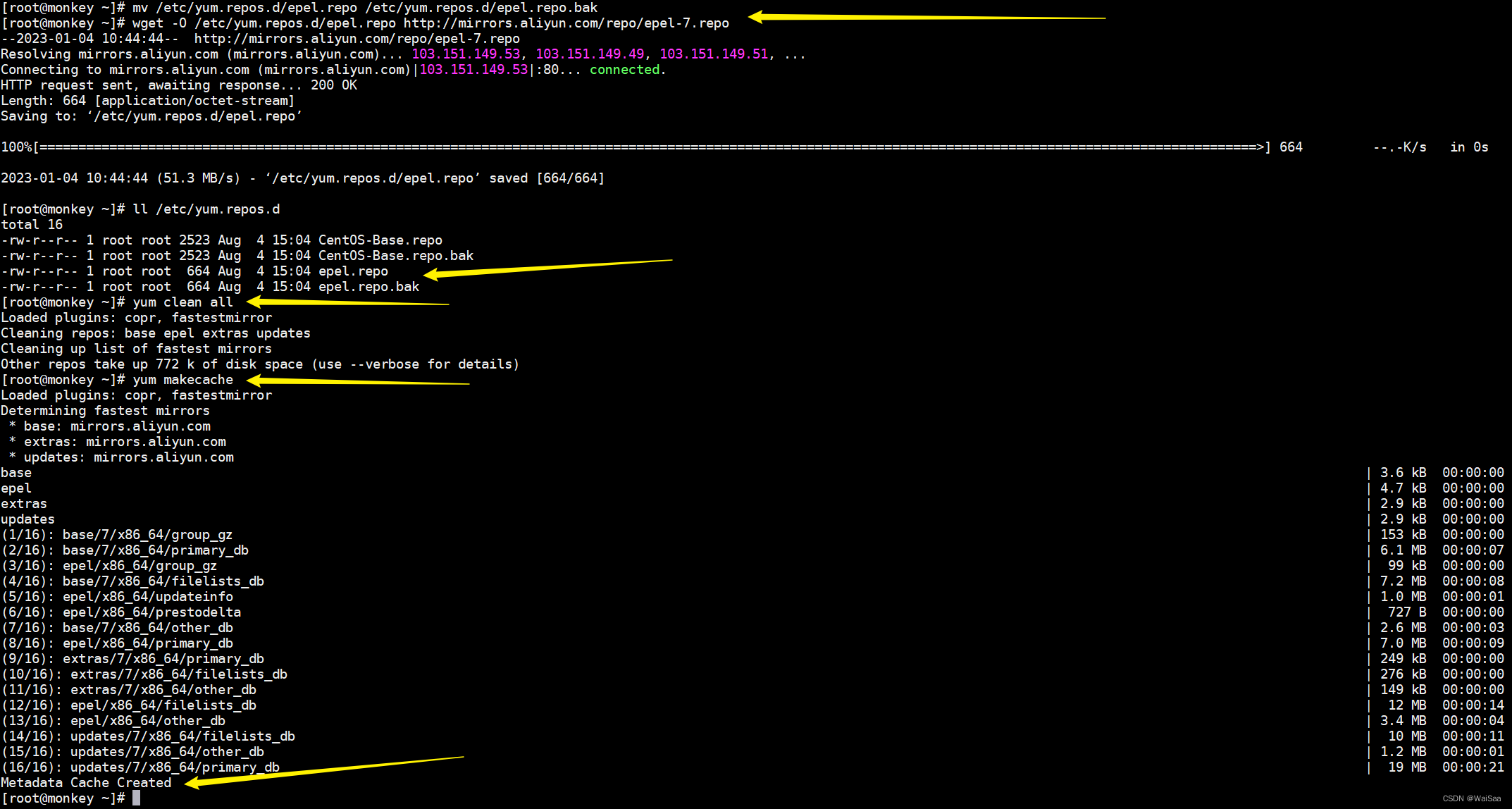
子恒喵是直接将rpm包里的epel.repo拿出来放到/etc/yum.repos.d/里面去,当成一个第三方源来用了…
这样就不需要多装一个rpm包了…(似乎有点强迫症呐Orz…)