Background
踩坑记录吧。下次可以直接复制粘贴,不用再去排查是哪个字母字符少了多了,我这都是执行成功的命令粘贴过来的。
1、基础知识简介
- yum:
- 全称“Yellow dog Updater, Modified”,是一个专门为了解决包的依赖关系而存在的软件包管理器。就好像 Windows 系统上可以通过 360 软件管家实现软件的一键安装、升级和卸载,Linux 系统也提供有这样的工具,就是 yum;
- 当然除了这种可自动安装软件包(自动解决包之间依赖关系)的安装方式,还可以使用 SRPM 源码包和 RPM 二进制包安装软件,但这两种方法都比较繁琐,需要手动解决包之间具有依赖性的问题,尤其是库文件依赖,需要自行去 http://www.rpmfind.net 网站上查找相关的 RPM 包;
- 使用 yum 安装软件包之前,需指定好 yum 下载 RPM 包的位置,此位置称为 yum 源。换句话说,yum 源指的就是软件安装包的来源;
- 使用 yum 安装软件时至少需要一个 yum 源。yum 源既可以使用网络 yum 源,也可以将本地光盘作为 yum 源,这里只介绍网络 yum 源配置;
- 一般情况下,只要你的主机网络正常,可以直接使用网络 yum 源,不需要对配置文件做任何修改;
- 网络 yum 源配置文件位于
/etc/yum.repos.d/目录下,文件扩展名为".repo"(只要扩展名为 ".repo" 的文件都是 yum 源的配置文件);- 通常情况下
CentOS-Base.repo文件生效。

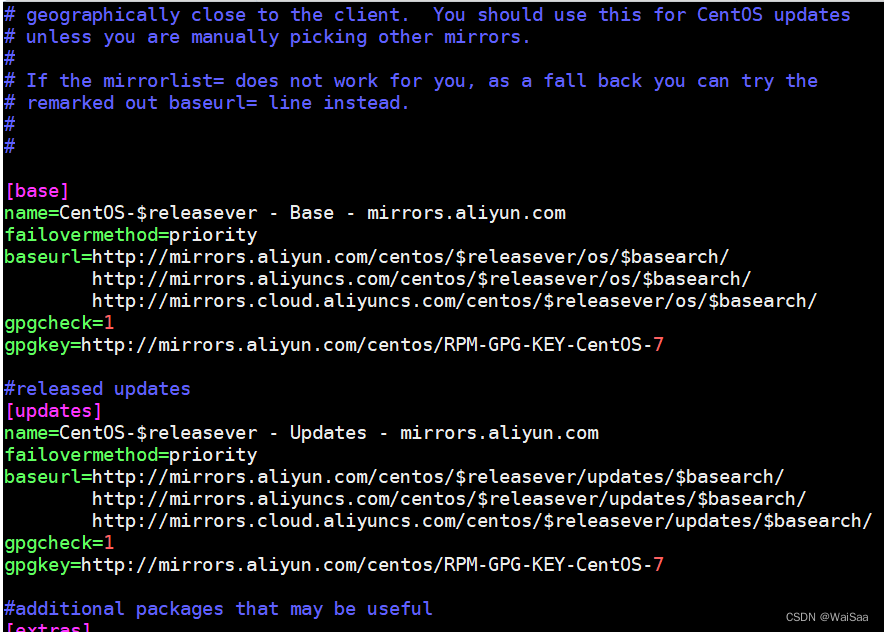
- [base]:容器名称,一定要放在[]中。
- name:容器说明,可以自己随便写。
- mirrorlist:镜像站点,这个可以注释掉。
- baseurl:我们的 yum 源服务器的地址。默认是 CentOS 官方的 yum 源服务器,是可以使用的。如果你觉得慢,则可以改成你喜欢的 yum 源地址。
- enabled:此容器是否生效,如果不写或写成 enabled 则表示此容器生效,写成 enable=0 则表示此容器不生效。
- gpgcheck:如果为 1 则表示 RPM 的数字证书生效;如果为 0 则表示 RPM 的数字证书不生效。
- gpgkey:数字证书的公钥文件保存位置。不用修改。
- epel:
- epel的全称叫 Extra Packages for Enterprise Linux 。epel是由 Fedora 社区打造,为 RHEL 及衍生发行版如 CentOS、Scientific Linux 等提供高质量软件包的项目;
- epel相当于一个第三方源。为什么需要 epel?因为 CentOS 官方源包含的大多数的库都是比较旧的。并且很多流行的库也不存在。当然这样做也是无可厚非的,毕竟服务器版本安全稳定是重点。
2、配置阿里云yum源
- 备份系统原来的repo文件
cd /etc/yum.repos.d/
mkdir bak
mv *.repo bak/
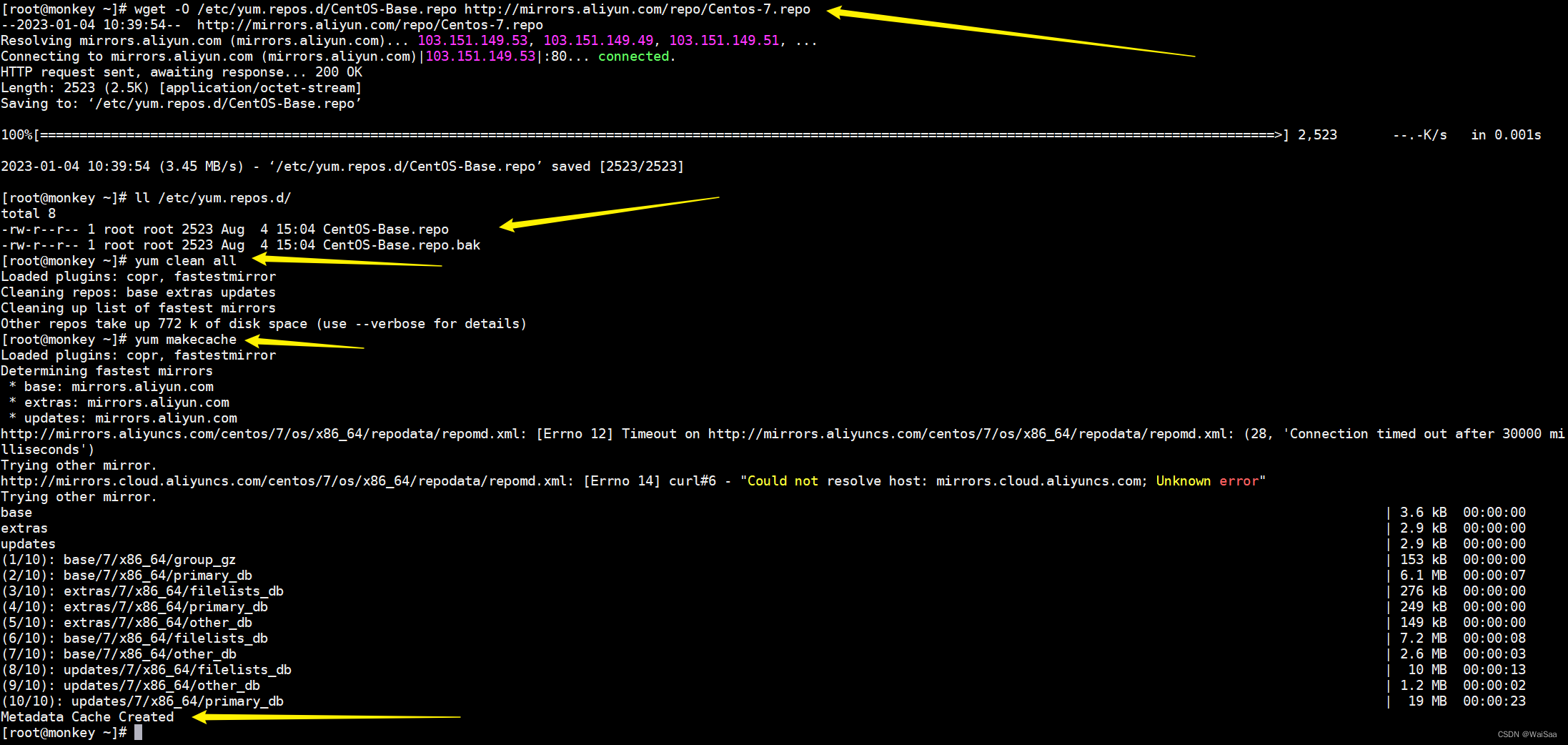
- 下载阿里yum配置文件
wget -O /etc/yum.repos.d/CentOS-Base.repo http://mirrors.aliyun.com/repo/Centos-7.repo
- 重建缓存
yum clean all
yum makecache
3、配置阿里云epel源
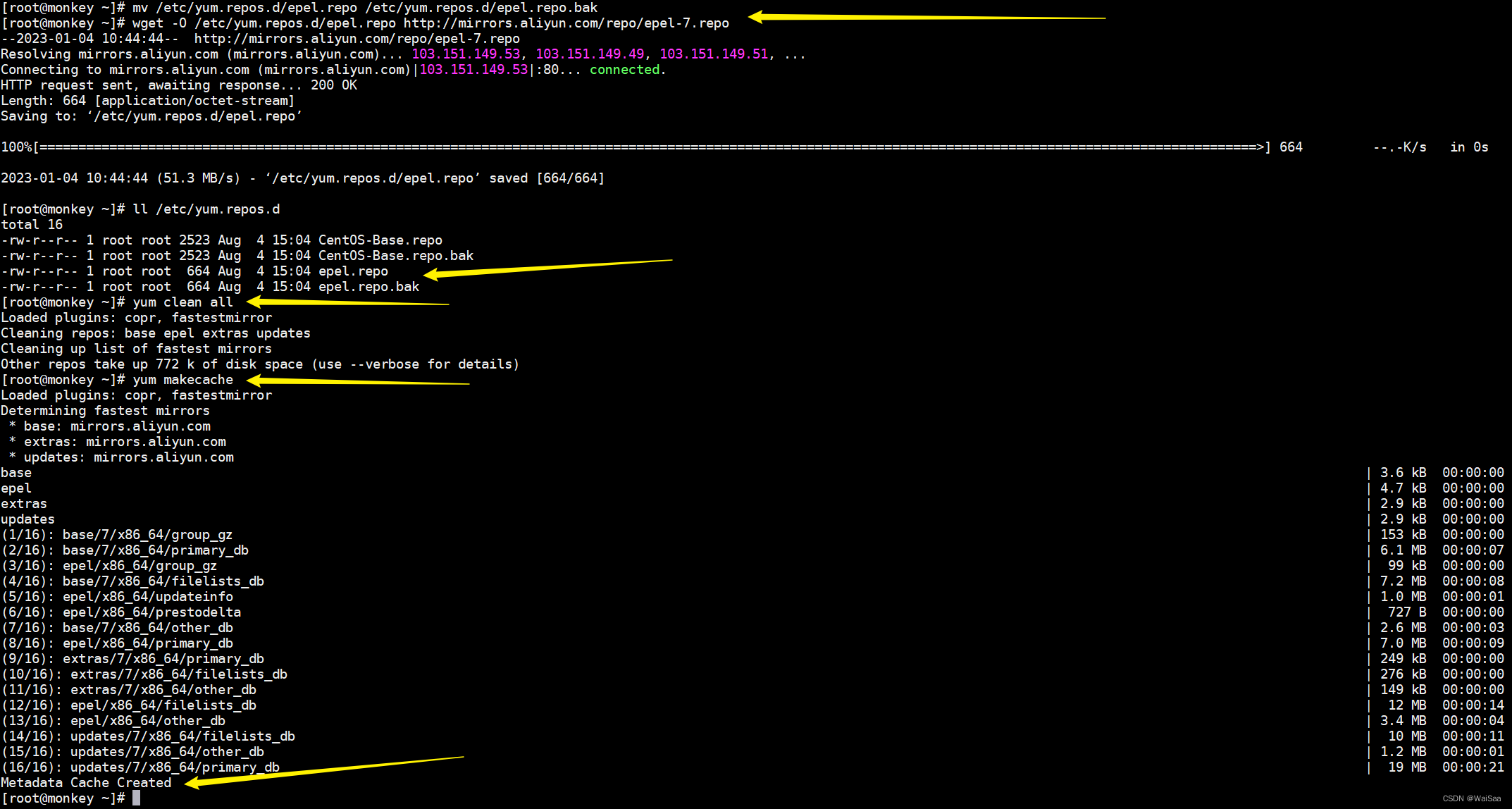
- 下载阿里epel配置文件
wget -O /etc/yum.repos.d/epel.repo http://mirrors.aliyun.com/repo/epel-7.repo
- 重建缓存
yum clean all
yum makecache