- f-信号频率
- fs-采样频率
- N-采样点数
信号频率(f):
信号频率就是信号的频率,其倒数是信号一个周期的时间T。
采样点数(N):
采样点数一次向PC端发送的数据量包含的点数,采样点数决定了每次传到PC内的数据量,实际就是每一个信号周期内采了几个点。dt=1/fs:采样频率一个周期的时间间隔---->> N=T/dt:每个信号周期内包含多少个采样周期,即每个信号周期内的采样点数N。
FFT、IFFT的采样带你输必须是2的指数,在频域一个频点对应时域的一次采样,所以FFT的点数自然就是2048、1024、512、256、128。
采样率频率(fs):
波形中相邻两点得间隔得时间就是采样频率得倒数,采样频率必须大于信号得频率(不失真)。
频率分辨率:
公式为fs/N,为什么要这样定义呢,顾名思义,频率分辨率意味着能分辨信号频率得最小间隔,已知N=T*fs,故1/T=fs/N。fs/N(频率分辨率)越小,精度越高,通过补0增加的FFT点数无法提高FFT精度。
产生信号得总时间长度t=dt*采样数=采样数/fs
信号周期T=1/f
产生信号得周期数=总时间长度/T=总时间长度×信号频率=采样数/采样频率 ×信号频率
采样针对信号处理来说,模拟信号得数字信号处理方法就是将待处理得模拟信号经过采样、量化编码形成数字信号,并利用数字信号处理方法对采样得到得数字信号进行处理。
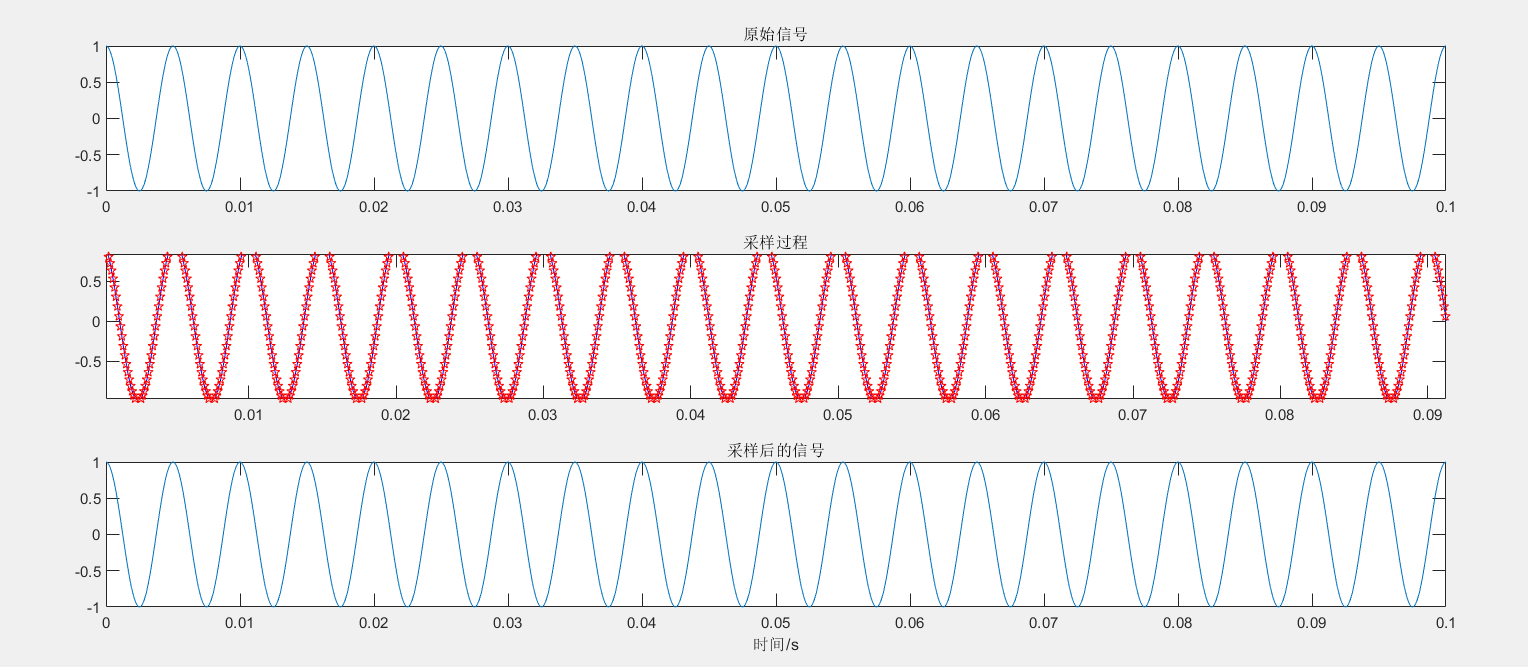
示例:
%采样信号
%信号生成
f=200;%信号频率
T=1/f;%一个信号周期的时间
t=linspace(0,20*T,1000*20);%源信号每个周期得点数为1000个点,总共20个周期
x=cos(2*pi*f*t);%生成得信号
%采样
N=50;%自定义采样点数,一个周期的采样点数
fs=f*N;采样频率
dt=1/fs;%采样间隔,采样间隔可以理解为采样信号的周期
T=0:dt:t(end);%整个信号的时间范围采样
x1=cos(2*pi*f*T);%对信号进行采样
subplot(311);
plot(t,x); %原始信号
title('原始信号');
ylim([-1 1]);
subplot(312);
plot(t,x,'b',T,x1,'rp'); % 采样点
title('采样过程');
ylim([-1 1]);
subplot(313)
plot(T,x1) %采样信号
title('采样后的信号')
ylim([-1 1])
xlabel('时间/s')