epel 是什么?
epel的全称叫 Extra Packages for Enterprise Linux。
EPEL 是由 Fedora 社区打造,为 RHEL 及衍生发行版如 CentOS、Scientific Linux 等提供高质量软件包的项目。
装上了 EPEL 之后,就相当于添加了一个第三方源。
为什么需要 EPEL?
那是因为 CentOS 源包含的大多数的库都是比较旧的。并且,很多流行的库也不存在。EPEL 在其基础上不仅全,而且还够新。
比如安装较新版docker的过程中,需要解决依赖性,但是系统镜像源中对应的软件包都比较旧。所以需要配置epel源。
EPEL 这两个优点,解决了很多人安装库的烦恼。
配置方法(需连接互联网,目前基本都使用的是阿里云的源,速度有保证)
一、备份 (如有配置其他epel源)
mv /etc/yum.repos.d/epel.repo /etc/yum.repos.d/epel.repo.backup
mv /etc/yum.repos.d/epel-testing.repo /etc/yum.repos.d/epel-testing.repo.backup
二、配置
epel (RHEL 8版本)

- yum 源的路径需要写到repodata的父目录,所以最简单直接的方法就是直接配置阿里云对应的baseurl
[root@foundation0 yum.repos.d]# more epel.repo
[epel]
name=Extra Packages for Enterprise Linux 8 - $basearch
baseurl=http://mirrors.aliyun.com/epel/8/Everything/x86_64
gpgcheck=0
[root@foundation0 yum.repos.d]# yum repolist
epel Extra Packages for Enterprise Linux 8 - x86_64 7,637
操作系统版本如果是8以下可以直接wget已配置好的repo文件,根据你目前使用的操作系统配置对应的源就OK
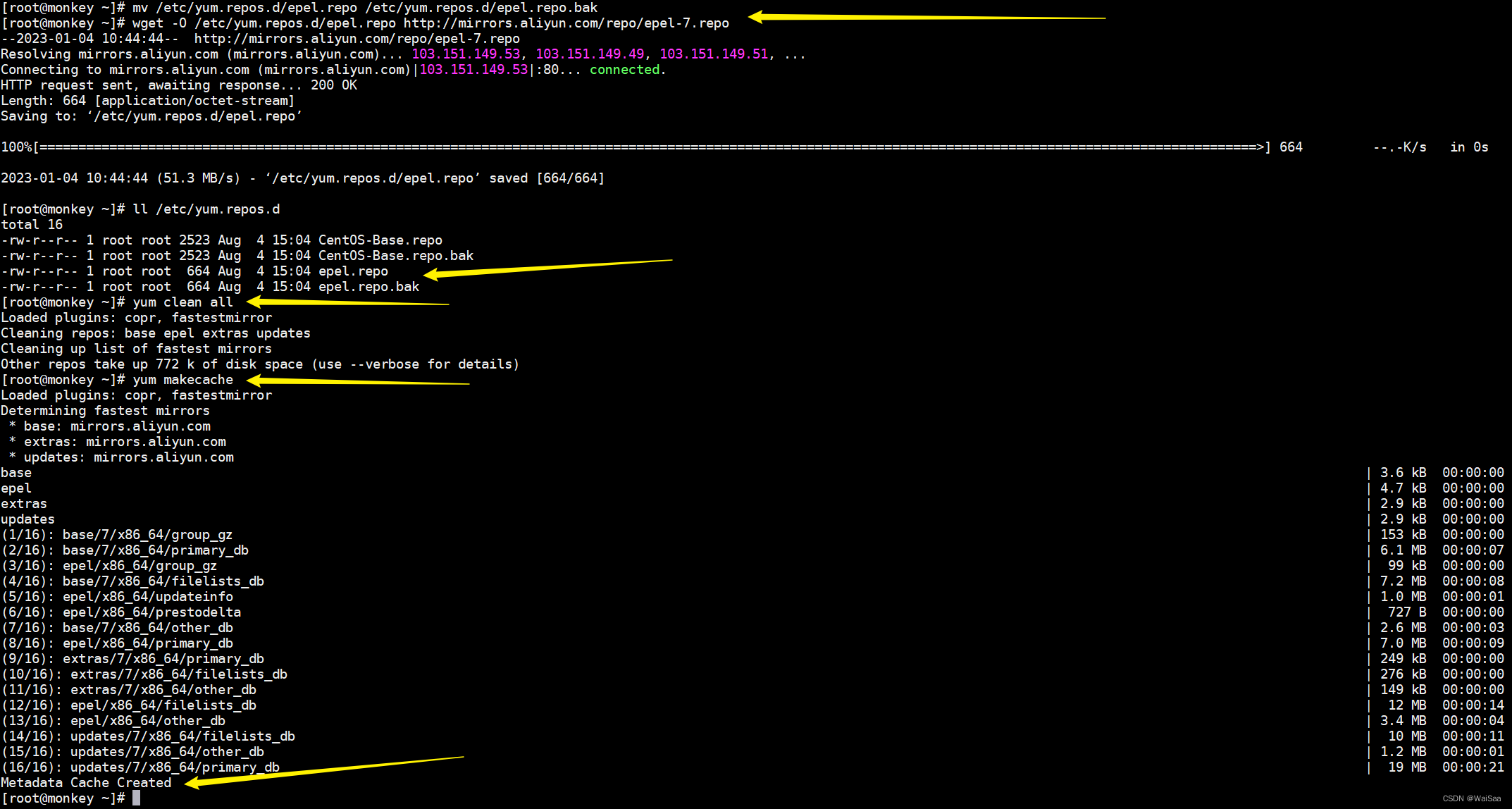
epel (RHEL 7)
wget -O /etc/yum.repos.d/epel.repo http://mirrors.aliyun.com/repo/epel-7.repo
epel(RHEL 6)
wget -O /etc/yum.repos.d/epel.repo http://mirrors.aliyun.com/repo/epel-6.repo
epel(RHEL 5)
wget -O /etc/yum.repos.d/epel.repo http://mirrors.aliyun.com/repo/epel-5.repo