一、概念/区分:
yum源
什么是yum源:
yum是一个在CentOS、RedHat和Fedora操作系统中使用的Shell前端软件包管理器。yum主要管理基于rpm的软件包,Centos先将发布的软件放置到YUM服务器内,然后分析这些软件的依赖属性问题,将软件内的记录信息写下来(header)。然后再将这些信息分析后记录成软件相关性的清单列表。这些列表数据与软件所在的位置可以称为仓库(repository)。当客户端有软件安装的需求时,客户端主机会向网络上面的YUM服务器的仓库网址上下载清单,然后通过清单列表的数据与本机RPM数据库已存在的软件数据相比较,就可以安装所有需要的具有依赖属性的软件了。
yum的基本工作流程:
服务器端:
在服务器上面存放了所有的RPM软件包,然后以相关的功能去分析每个RPM文件的依赖性关系,将这些数据记录成文件存放在服务器的某特定目录内。
客户端:
如果需要安装某个软件时,先下载服务器上面记录的依赖性关系文件(可通过WWW或FTP方式),通过对服务器端下载的纪录数据进行分析,然后取得所有相关的软件,一次全部下载下来进行安装。
yum客户端的配置文件:
repo文件是CentOS、RedHat和Fedora操作系统中yum源(软件仓库)的配置文件,通常一个repo文件定义了一个或者多个软件源。
yum 的客户端配置文件分为两部分main 和repository:
main:定义了全局配置选项,整个yum 配置文件应该只有一个main,常位于/etc/yum.conf ,这个文件为所有仓库提供公共配置,包括yum下载的RPM包的缓存目录,日志所在位置,是否允许更新不同版本的RPM包等等。
repository:定义了每个源/服务器的具体配置,可以有一到多个。常位于/etc/yum.repo.d目录下的各文件中,这个文件为仓库的指向提供配置。
yum 的配置方式也分两种:
直接配置/etc目录下的yum.conf文件,增加repository片段
在/etc/yum.repos.d目录下增加.repo文件
/etc/yum.conf文件详解:
[main]
cachedir=/var/cache/yum # cachedir:yum缓存的目录,yum在此存储下载的rpm包和数据库,一般是/var/cache/yum
debuglevel=2 # debuglevel:除错级别,0──10,默认是2 貌似只记录安装和删除记录
logfile=/var/log/yum.log # 日志路
pkgpolicy=newest # pkgpolicy: 包的策略。一共有两个选项,newest和last,这个作用是如果你设置了多个repository,而同一软件在不同的repository中同时存 在,yum应该安装哪一个,如果是newest,则yum会安装最新的那个版本。如果是last,则yum会将服务器id以字母表排序,并选择最后的那个 服务器上的软件安装。一般都是选newest。
distroverpkg=centos-release # 指定一个软件包,yum会根据这个包判断你的发行版本,默认是redhat-release,也可以是安装的任何针对自己发行版的rpm包。
tolerant=1 # tolerent,也有1和0两个选项,表示yum是否容忍命令行发生与软件包有关的错误,比如你要安装1,2,3三个包,而其中3此前已经安装了,如果你设为1,则yum不会出现错误信息。默认是0。
exactarch=1 # exactarch,有两个选项1和0,代表是否只升级和你安装软件包cpu体系一致的包,如果设为1,则如你安装了一个i386的rpm,则yum不会用1686的包来升级。
retries=20 # retries,网络连接发生错误后的重试次数,如果设为0,则会无限重试。
obsoletes=1 # 这是一个update的参数,具体请参阅yum(8),简单的说就是相当于upgrade,允许更新陈旧的RPM包
gpgcheck=1 # gpgchkeck= 有1和0两个选择,分别代表是否进行gpg校验,以确定rpm 包的来源是有效和安全的,如果没有这一项,默认是检查的。
exclude=xxx #exclude 排除某些软件在升级名单之外,可以用通配符,列表中各个项目要用空格隔开,这个对于安装了诸如美化包,中文补丁的朋友特别有用。
keepcache=[1 or 0] #设置 keepcache=1,yum 在成功安装软件包之后保留缓存的头文件 (headers) 和软件包。默认值为 keepcache=0 不保存
reposdir=[包含 .repo 文件的目录的绝对路径] # 该选项用户指定 .repo 文件的绝对路径。.repo 文件包含软件仓库的信息 (作用与 /etc/yum.conf 文件中的 [repository] 片段相同)。repo文件详解:
我们以Centos-Base.repo仓库基础配置文件为例一个标准的centos的repo文件内容如下:
[base]
name=CentOS-$releasever - Base
mirrorlist=http://mirrorlist.centos.org/?release=$releasever&arch=$basearch&repo=os
#baseurl=http://mirror.centos.org/centos/$releasever/os/$basearch/
enabled=1
gpgcheck=1
gpgkey=file:///etc/pki/rpm-gpg/RPM-GPG-KEY-CentOS-6各个选项说明如下:
[base]:代表仓库的名字,中括号一定要存在,里面的名称可以随意,但是不能有两个相同的容器名称。
name:说明一下仓库的意义。
mirrorlist:这个是仓库的镜像站点列表。一般情况下默认是使用此选项。
baseurl:这个最重要,因为后面接的就是仓库的实际地址。mirrorlist是由yum程序自行去找镜像站点,baseurl则是指定固定的一个仓库网址。一个repo文件可以定义多个软件源。
enable=1:就是让这个容器启动,如果不想启动可以使用enable=0.
gpgcheck=1:指定是否需要查阅RPM文件内的数字证书。
gpgkey:就是数字证书的公钥文件所在的位置。在Centos-Base.repo中还定义的其它的名称的仓库,如:[updates]、[extras]、[centosplus]等等,这些仓库都为YUM服务器额外附加或者是升级是用到的软件仓库,分别指向不同的路径软件仓库。
epel源
EPEL源是什么:
EPEL (Extra Packages for Enterprise Linux)是基于Fedora的一个项目,为“红帽系”的操作系统提供额外的软件包,适用于RHEL、CentOS和Scientific Linux。说白了,有些组件yum源没有,epel里面有
如何获取 EPEL 的软件包:
EPEL 包含一个叫做 ‘epel-release’ 的包,其中包含了用于软件包签名的 gpg 密钥和软件源的信息。安装这个包到您的企业版 Linux 上之后,您将可以通过使用类似于 yum 的工具来安装软件包和它们的依赖。在默认情况下,EPEL 仓库的稳定版本是开启的。除了 epel-release 源,还有一个叫做 ‘epel-testing’ 仓库 包含尚未被视作稳定的软件,请自行斟酌开启的风险。 CentOS 用户可以直接通过 yum install epel-release 安装并启用 EPEL 源。
二、部署
部署阿里yum源
1.备份本地yum源
[root@75-124 yum.repos.d]# mv /etc/yum.repos.d/CentOS-Base.repo /etc/yum.repos.d/CentOS-Base.repo_bak2.获取阿里yum源配置文件
[root@75-124 yum.repos.d]# wget -O /etc/yum.repos.d/CentOS-Base.repo http://mirrors.aliyun.com/repo/Centos-7.repo3.如果是最小化安装,没有wget命令
[root@75-124 yum.repos.d]# curl http://mirrors.163.com/.help/CentOS7-Base-163.repo >/etc/yum.repos.d/CentOS-Base.repoCentOS7
[root@75-124 yum.repos.d]# curl http://mirrors.163.com/.help/CentOS7-Base-163.repo
CentOS6
[root@75-124 yum.repos.d]# curl http://mirrors.163.com/.help/CentOS6-Base-163.repo
CentOS5
[root@75-124 yum.repos.d]# curl http://mirrors.163.com/.help/CentOS5-Base-163.repo
部署阿里epel(RHEL 7)源
两种方案:
一、yum安装1.安装 epel 配置包
[root@75-124 yum.repos.d]# yum install -y https://mirrors.aliyun.com/epel/epel-release-latest-7.noarch.rpm2.将 repo 配置中的地址替换为阿里云镜像站地址
sed -i 's|^#baseurl=https://download.fedoraproject.org/pub|baseurl=https://mirrors.aliyun.com|' /etc/yum.repos.d/epel* sed -i 's|^metalink|#metalink|' /etc/yum.repos.d/epel*多了两个文件:epel.repo 和epel-testing.repo
二、wget下载直接用
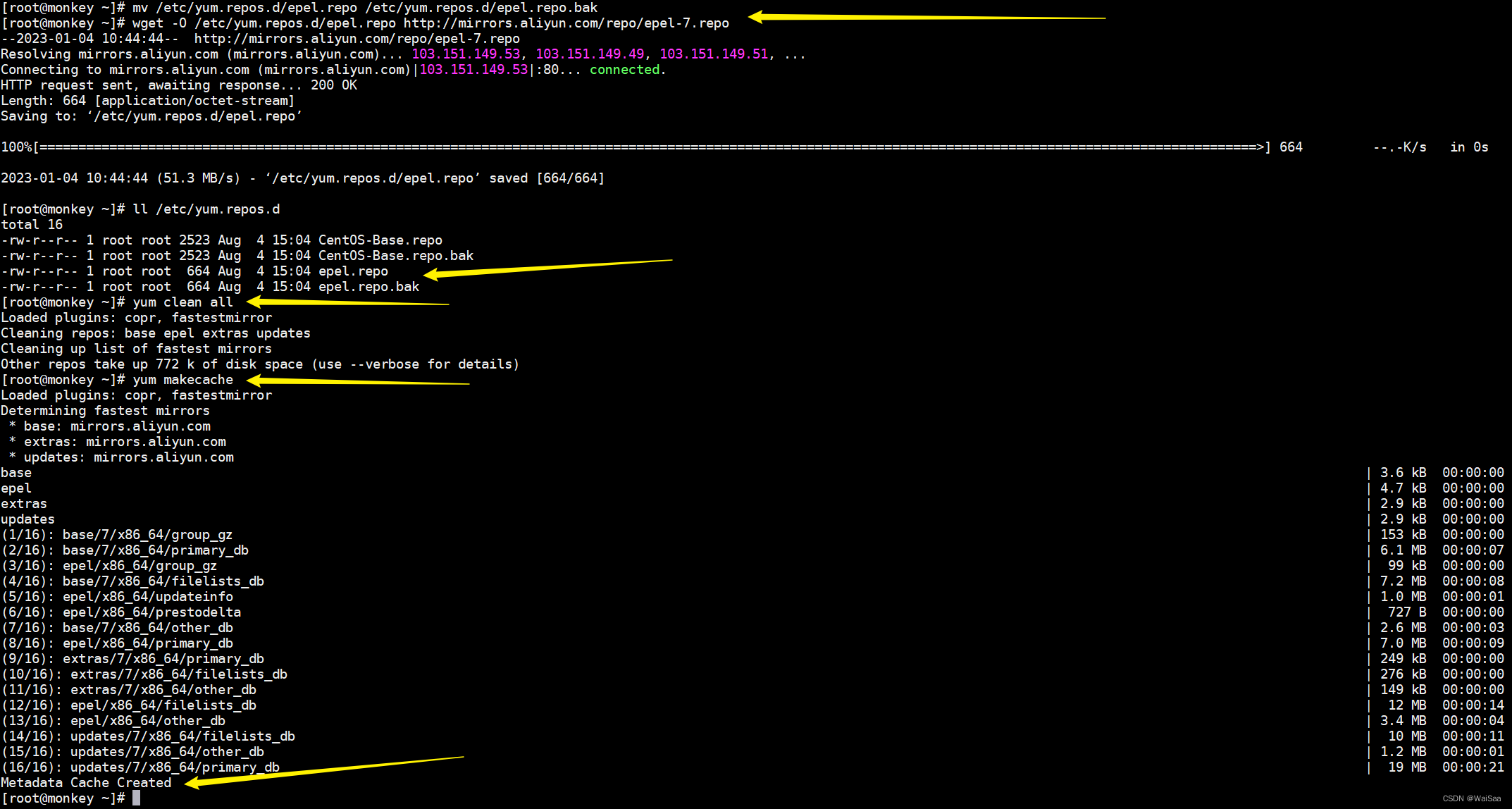
[root@75-124 yum.repos.d]# wget -O /etc/yum.repos.d/epel.repo http://mirrors.aliyun.com/repo/epel-7.repo
两个都要更新yum缓存
[root@75-124 yum.repos.d]# yum clean all
[root@75-124 yum.repos.d]# yum makecache讲解:
yum clean all:清除YUM缓存,清除所有已下载的包文件。yum 会把下载的软件包和header存储在cache中,而不会自动删除。并且如果觉得它们占用了磁盘空间,可以使用yum clean指令进行清除,更精确的用法是yum clean headers清除header,yum clean packages清除下载的rpm包,yum clean all 全部清除
yum makecache:就是把服务器的包信息下载到本地电脑缓存起来,yum安装的时候,会先从本地缓存中调用,其实即使没有yum makecache,yum检测本地无包,会从yum拉取,所以可执行可不执行,不过最好还是再执行一下yum makecache命令。其实即使没有yum makecache,如果yum安装的时候会将安装包进行缓存,不过最好还是再执行一下yum makecache命令
4.(可不执行) yum源更新命令
[root@75-124 yum.repos.d]# yum update -y(升级所有包同时也升级软件和系统内核)讲解:
其实更推荐用yum upgrade取代yum update,yum update只更新系统中已有的软件包,不会更新内核软件包(kernel-这个包),yum upgrade是更彻底的update,会分析包的废弃关系,可以跨小版本升级(比如从centos 7.1升级到centos 7.4),除了做了yum update完全相同的事之外,还会更新kernel-的包,也会卸载掉已经废弃的包。
新部署系统需要yum update/upgrade是因为yum不会给你解决依赖冲突(但是apt会)。所以yum update 是为了解决跟换yum源之后,rpm包之间的依赖关系,以免后面yum 安装某些服务报错。
因为拿到的服务器都是软件包版本比较低的操作系统,安装上层应用的时候可能会告诉你依赖不能满足,此时你需要用yum update/upgrade更新下系统的软件包,以满足安装依赖举个例子,你的系统中已经安装了kernel-2.6.32.500,但是你要安装的某个软件包依赖于kernel-2.6.32.600,此时yum会报错退出,告诉你依赖不满足,并不会升级kernel包(只是举个例子而已,实际上几乎没有软件包直接依赖于kernel包),所以你只能yum update/upgrade一次,把系统中所有的软件包全部更新,这样满足新部署的软件包的依赖。
在debian/ubuntu的系统中,apt会对这种情况自动处理,会自动升级依赖的软件包。
换句话来说,对于新部署的服务器,也是推荐upgrade全部的软件包,已获得最新的安全补丁。即使对于已经上线的服务器,也是推荐定期打安全漏洞补丁,减少漏洞带来的侵害。
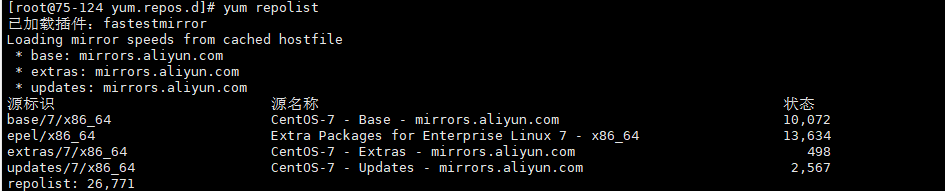
5.查看当前yum源
[root@75-124 yum.repos.d]# yum repolist