这里写目录标题
- 实验拓扑
- 实验需求
- 配置过程
- 1.配置ip地址(略)
- 2.配置去往公网的默认路由
- 3.将端口绑定在信任域和不信任域
- 4.配置ipv4安全模板
- 5.配置ospf将内网的连通性完成
- 6.配置nat (easy ip的方式)使内网PC可以访问外网
- 测试
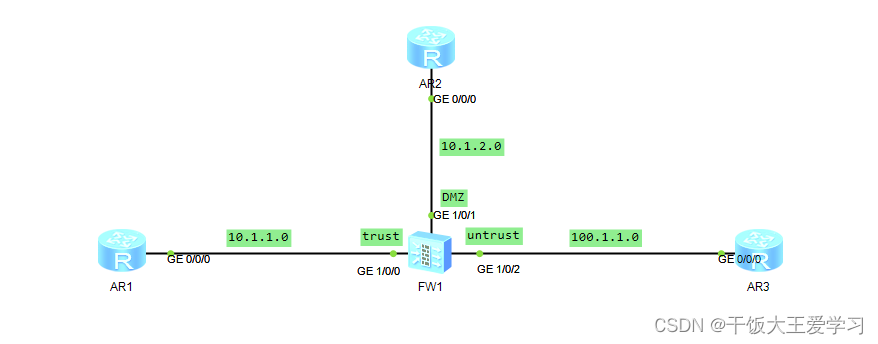
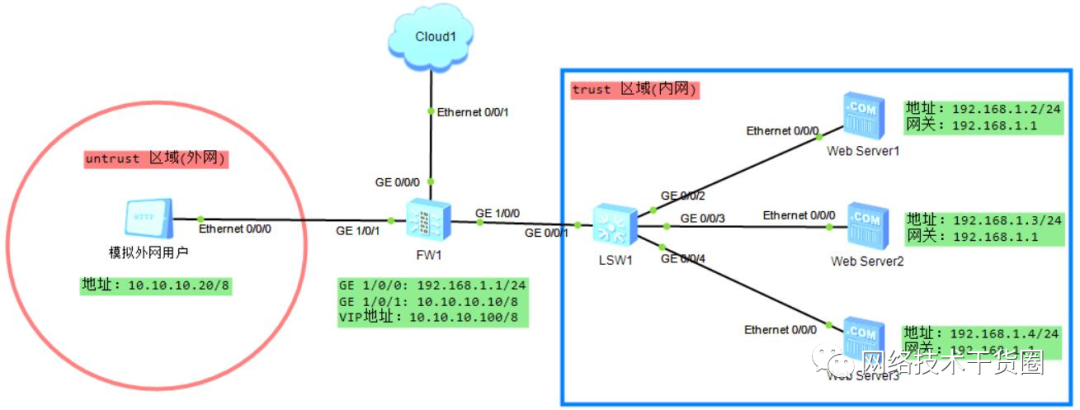
实验拓扑
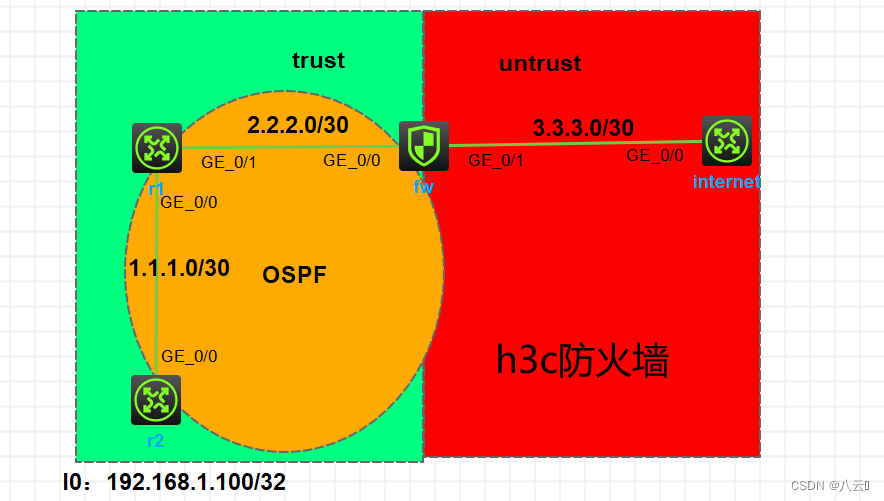
实验需求
1.根据题目要求配置IP地址,用路由器R2的环回地址模拟PC地址
2.防火墙端口绑定安全域,配置安全策略,local/trust/untrust 域可互通
3.内网做ospf,保证内网的连通性
4.配置NAT使内网可访问 internet
配置过程
1.配置ip地址(略)
2.配置去往公网的默认路由
[fw]ip route-static 0.0.0.0 0 3.3.3.2
3.将端口绑定在信任域和不信任域
[fw]security-zone name Trust
[fw-security-zone-Trust]import interface g1/0/0
[fw-security-zone-Trust]qu
[fw]security-zone name Untrust
[fw-security-zone-Untrust]import interface g1/0/1
4.配置ipv4安全模板
[fw]security-policy ip ##创建ipv4安全模板
注:防火墙默认有5个域:Local 本地,Trust 信任,Untrust 不信任,DMZ 隔离区或非军事区,Management 管理
1.使内网可以访问防火墙
[fw-security-policy-ip]rule 1 name t2l ##规则名
[fw-security-policy-ip-1-t2l]source-zone trust ##源区域trust
[fw-security-policy-ip-1-t2l]destination-zone local ##目标区域local
[fw-security-policy-ip-1-t2l]action pass ##允许通行
[fw-security-policy-ip-1-t2l]qu
[fw-security-policy-ip]rule 2 name l2t
[fw-security-policy-ip-2-l2t]source-zone local
[fw-security-policy-ip-2-l2t]destination-zone trust
[fw-security-policy-ip-2-l2t]action pass
2.使外网可以访问防火墙
[fw-security-policy-ip]rule 3 name u2l
[fw-security-policy-ip-3-u2l]source-zone untrust
[fw-security-policy-ip-3-u2l]destination-zone local
[fw-security-policy-ip-3-u2l]action pass
[fw-security-policy-ip-3-u2l]qu
[fw-security-policy-ip]rule name l2u
[fw-security-policy-ip-4-l2u]source-zone local
[fw-security-policy-ip-4-l2u]destination-zone untrust
[fw-security-policy-ip-4-l2u]action pass
3.使内网可以访问外网
[fw-security-policy-ip]rule 5 name t2u
[fw-security-policy-ip-5-t2u]source-zone trust
[fw-security-policy-ip-5-t2u]destination-zone untrust
[fw-security-policy-ip-5-t2u]action pass
[fw-security-policy-ip-5-t2u]qu
[fw-security-policy-ip]rule 6 name u2t
[fw-security-policy-ip-6-u2t]source-zone untrust
[fw-security-policy-ip-6-u2t]destination-zone trust
[fw-security-policy-ip-6-u2t]action pass
5.配置ospf将内网的连通性完成
[r2]ospf
[r2-ospf-1]area 0
[r2-ospf-1-area-0.0.0.0]network 1.1.1.1 0.0.0.0
[r2-ospf-1-area-0.0.0.0]network 192.168.1.100 0.0.0.0
[r1]ospf
[r1-ospf-1]area 0
[r1-ospf-1-area-0.0.0.0]network 1.1.1.2 0.0.0.0
[r1-ospf-1-area-0.0.0.0]network 2.2.2.1 0.0.0.0
[fw]ospf
[fw-ospf-1]area 0
[fw-ospf-1-area-0.0.0.0]network 2.2.2.2 0.0.0.0
[fw-ospf-1-area-0.0.0.0]network 3.3.3.1 0.0.0.0
6.配置nat (easy ip的方式)使内网PC可以访问外网
[fw]acl b 2000
[fw-acl-ipv4-basic-2000]rule permit source 192.168.1.100 0.0.0.0
[fw-GigabitEthernet1/0/1]nat outbound 2000
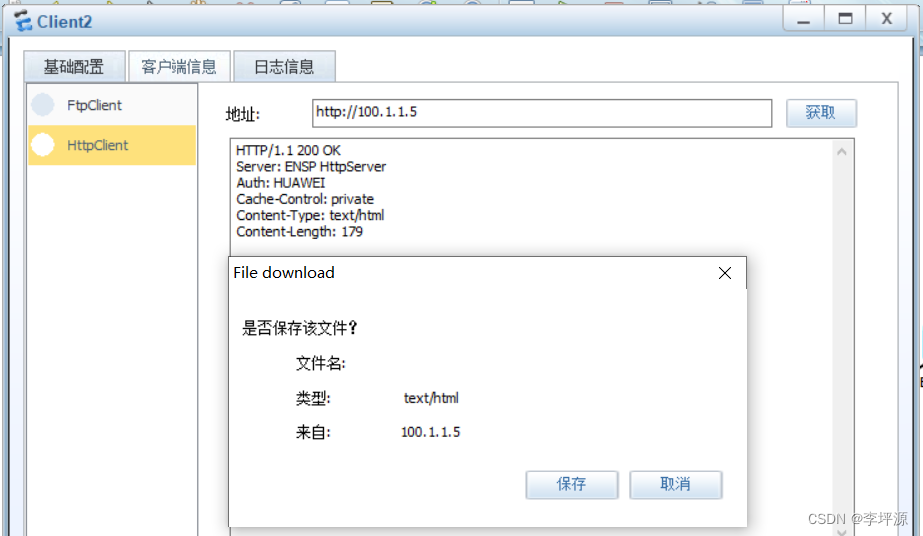
测试
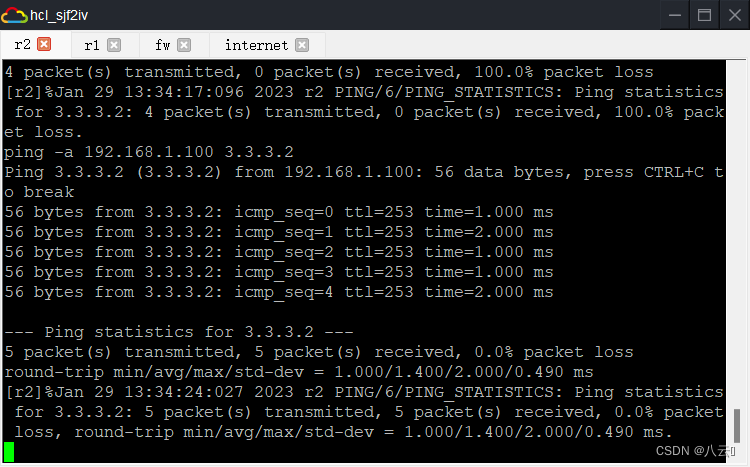
通过带源ping internet的地址是否可以通
[r2]ping -a 192.168.1.100 3.3.3.2