初始对准(粗、精对准)/组合导航
一、捷联惯导粗对准
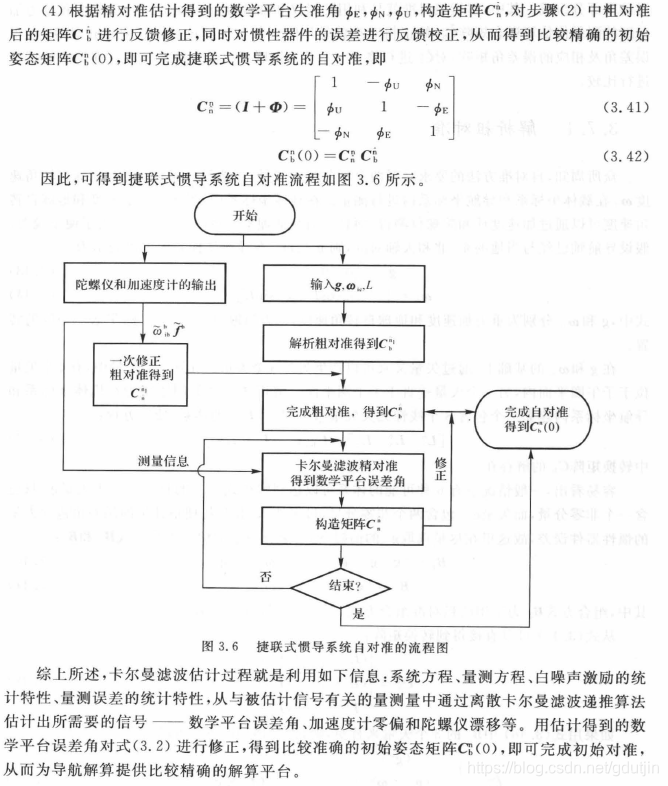
目的:寻找、确定参考导航坐标系;结果表现形式:得到姿态矩阵(进而可以求出欧拉角、四元数等)
前提:在导航坐标系(比如:东北天)下的重力矢量、地球旋转角速率、精确的地理位置(主要是纬度和高度)精确已知;
方法:双矢量定姿、多矢量定姿;

1、解析粗对准:
解析粗对准方法:依靠地球重力矢量、地球自转角速度、静止放置IMU采集一段时间数据然后求取平均值(速率单位);
公式:

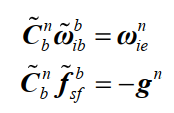
由于静止,速度为0;并且导航系相对地球系不旋转,即:
![]()
Wnen为0;
上式变为如下:

![]()
做近似处理,得:
选取重力矢量作为主参考矢量;

通过误差分析:
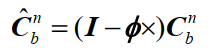
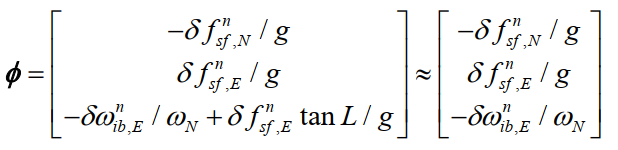
上式表明:
水平失准角的对准误差主要取决于加速度计的等效水平测量误差 ;
;
方位失准角的对准误差主要取决于陀螺的等效东向测量误差![]()
因此,粗对准的水平角优于方位角!
2、间接粗对准:

需要的变量:
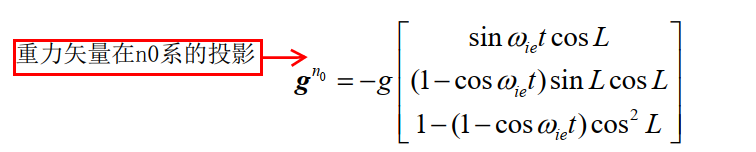
(1)重力矢量在n0系的投影:
![]()

(2)加速度计的比力输出在b0系的投影:


细节:需要得到两个时刻的重力矢量和比力;其公式如下:
(1)重力矢量含有时间(t),
(2)比力输出:器件会输出
二、捷联惯导精对准
在静基座下的导航解算速度即为速度误差,根据惯导系统误差传播规律,从速度误差中能够反推出失准角误差。在静基座下进行初始对准,由于真实惯导系统的地理位置没有明显移动,且真实速度为零。至多因干扰而产生微小线晃动,因而对准过程中的惯导解算可以使用如下简化导航算法。
姿态微分方程:静止条件下,Wnen为0矢量;

速度微分方程:V为0矢量;

即:
![]()
得到简化的误差方程:

厨师对准状态空间模型为:(由于系统静止,通过如下可以看出,系统为线性定常系统)

即可观测性矩阵为:rank(Q)=7,即有7个可观测变量;

不可观测变量为:东向陀螺仪零偏;东、北向加速度计零偏;
由于其不可观测,因此,在状态估计中,可观测状态的极限精度为:

其中,精对准和粗对准中,得到的是同样的极限对准精度!
由于有3个状态不可观测,因此将kalman中的状态变为7个;如下:

三、组合导航
1、杆臂误差(杆臂由IMU指向GNSS,原点位于IMU中心)

(1)速度误差:

即:

杆臂速度误差:

其中:
![]()
(2)杆臂位置误差:

位置误差为:

其中:

2、时间不同步误差:
3、车载惯导/里程计组合导航
条件:里程计安装在非转向轮,且前进速度为正、后退速度为负;
里程仪(odometer) 输出的信号一般是载车在一小段时间内行驶的路程增量,为了理论分析方便,不妨假设里程仪输出的是瞬时速度。
里程计坐标系(m系):【右 前 上】;里程计速度输出在里程计坐标系的表示如下:

其中, Vd 为里程仪测得的前向速度大小, 右向和天向速度均为零, 可视为载车正常行驶时的速度约束条件。
3.1 更新算法:
1、姿态更新算法:
![]()

2、速度更新算法:假设里程计直接输出的是y轴的速度信号;
![]()
3、位置更新算法;
里程计在一时间段内【Tk-1 Tk】内的路程增量为ΔS

3.2 航位推算误差分析:
回顾知识点:认为两个b系是重合的;


假设存在一个坐标系A,可以做出和上述一样的表达:其中A坐标系和b坐标系重合,CbA=单位矩阵;


1、姿态误差方程:
经过推导,发现滚动角不影响里程计的速度输出;

2、速度误差方程:
![]()
3、位置误差方程:


其中三个误差方程所涉及到矩阵如下: