文章目录
- 惯性导航原理
- 1D
- 2D/3D
- 平台式系统
- 捷联式系统
- 平台式与捷联式惯导特点对比
- 惯性导航系统特性
- 优点
- 缺点
- INS的精度等级
- 典型战术级惯导
- 惯性器件的相对测量能力
惯性导航原理
航位推算(Dead-Reckoning):
惯性导航就属于航位推算,每一步都是在上一步坐标的基础上,推算出来的
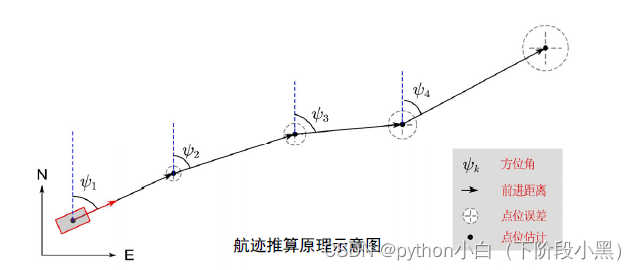
缺点:每一步推算都有误差,随过程逐步累加,因此精度发散
优点:独立自主,与绝对定位(如GPS)可互补
转子陀螺:
可基于高速转动的转子陀螺,利用它的定轴性,可测出三个方向姿态角(俯仰、横滚角、航向角),利用两个轴,可测出四个角度,其中有一个角度是冗余的
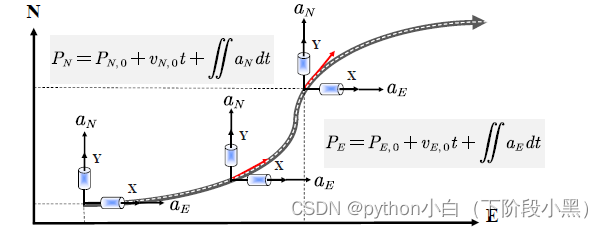
1D
惯性导航原理:递推式航位推算
-假设有一小车在水平直线轨道上运动
-在小车上沿运动方向上安装了一只加速度计

2D/3D
2D/3D出现的问题
-由传感器数据获得载体相对于参考坐标系的方
向及其变化的问题。
- 将传感器数据从“相对于惯性坐标系”转换到“相
对于参考坐标系”。 - 需要补偿地球万有引力(重力)加速度。
解决策略:
平台式系统和捷联式系统(目前用得较多)
(Gimbal vs. Strapdown)
平台式系统
物理平台
- 加速度计敏感轴始终指向东向和北向
- 载体航向的变化由陀螺感知,据此控制稳定平台的
转动,使其始终跟踪东向和北向
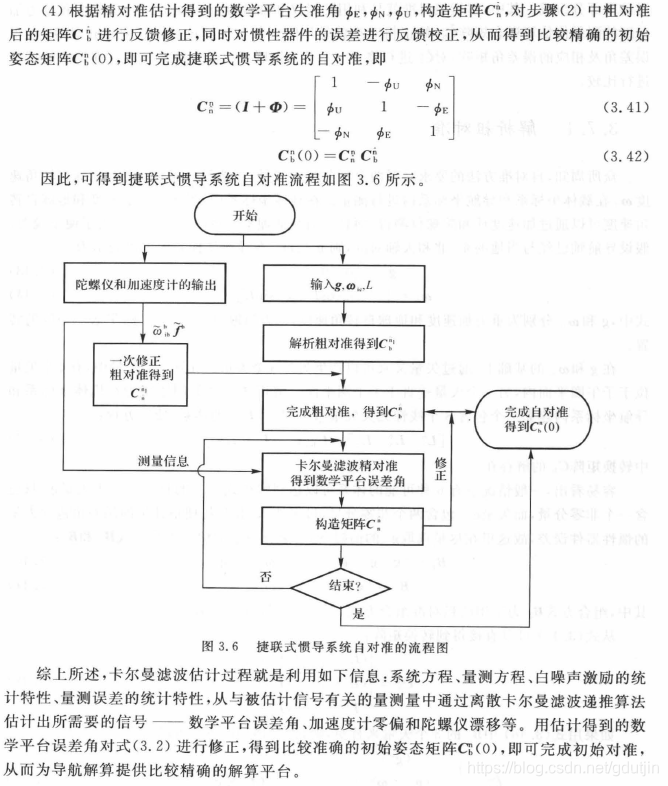
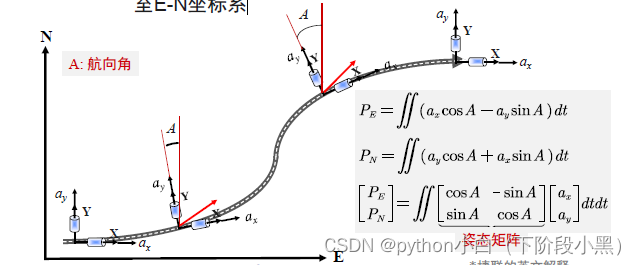
捷联式系统
数学平台
- 加速度计和陀螺与载体固联(strapdown)
- 根据陀螺输出更新姿态矩阵,将比力向量投影变换
至E-N坐标系
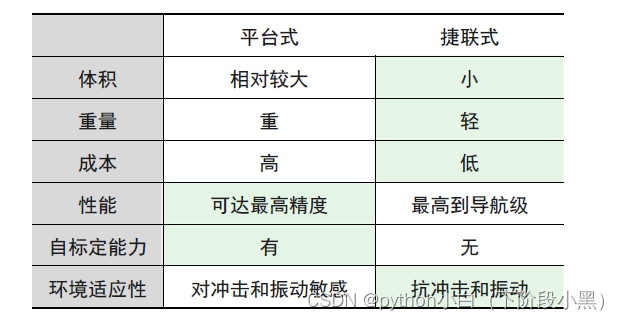
平台式与捷联式惯导特点对比
惯性导航系统特性
优点
- 完全自主性和高可靠性(军用和航空航天)
- 导航信息丰富
- 动态性能好(采样率高、频带宽)
缺点
- 惯性导航误差随时间累积
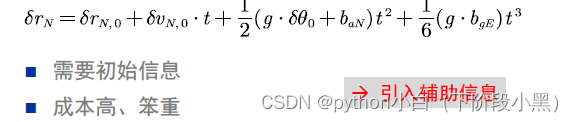
由上图可知,初始位置是常值误差,初始速度误差造成的位置误差是随时间一次方发散;而初始姿态角(俯仰角常值误差)常值误差和加速度计误差,是随时间二次方发散;陀螺的零偏误差,造成的位置误差是随时间三次方发散的,这个量的影响是很大的,是一个决定性的误差因素
INS的精度等级
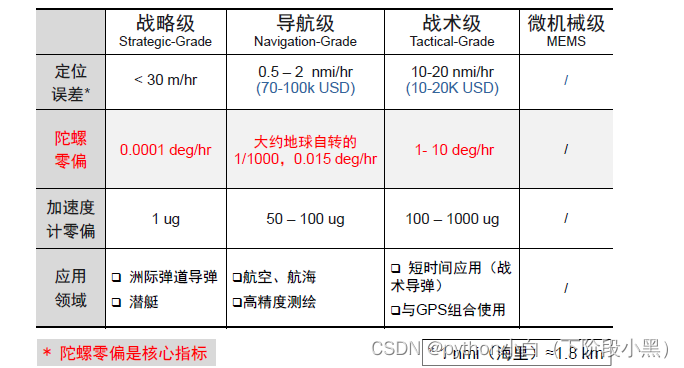
陀螺零偏为核心指标;目前的MEMS可以达到战术级的精度,它的陀螺零偏要求是1-10°每小时,加速度计零偏要求是万分之一g或千分之一g都可以。
典型战术级惯导
下图是一个战术级惯导的指标:
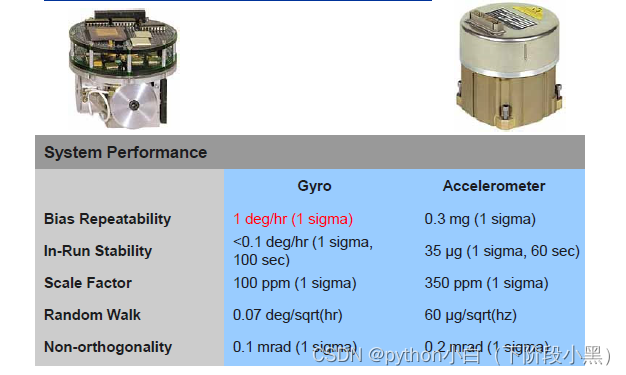
注:对于陀螺零偏,只需要记住0.01deg/h(对应导航级)和1deg/h(对应战术级)即可。
惯性器件的相对测量能力
以导航级惯导的陀螺为例
- 陀螺零偏
0.01 deg/hr - 陀螺量程1000
deg/s= 3600,000deg/hr - 相对测量能力= 量程/ 零偏= 3.6x108 ! (非严谨类比:等效于测量武汉—北京距离,精度3
mm!)