惯导及组合导航回顾 2018.09.16
今天和17系的同学一起把惯导的流程捋了一遍,为了加深自己的记忆,这里在前面把心得大致列出来。
我们这里只考虑捷联式惯导及松组合
首先拿到惯性传感器(加速度计和陀螺仪)需要对其进行标定,是为了求出零偏,比例因子,交轴耦合这些误差。这些误差有的虽然在出厂时会给出,但是考虑到实际环境不同,还是要做标定。一般采用的是六位置旋转法,针对加速度计和陀螺仪同时进行标定。
其次需要求姿态转移矩阵
,这里就是初始对准了。
这里针对激光陀螺,这种高精度陀螺仪可以敏感地球自转角速度以及重力加速度,所以可以用
,
用双矢量定姿来求姿态阵。而MEMS这种低精度IMU,不能准确敏感
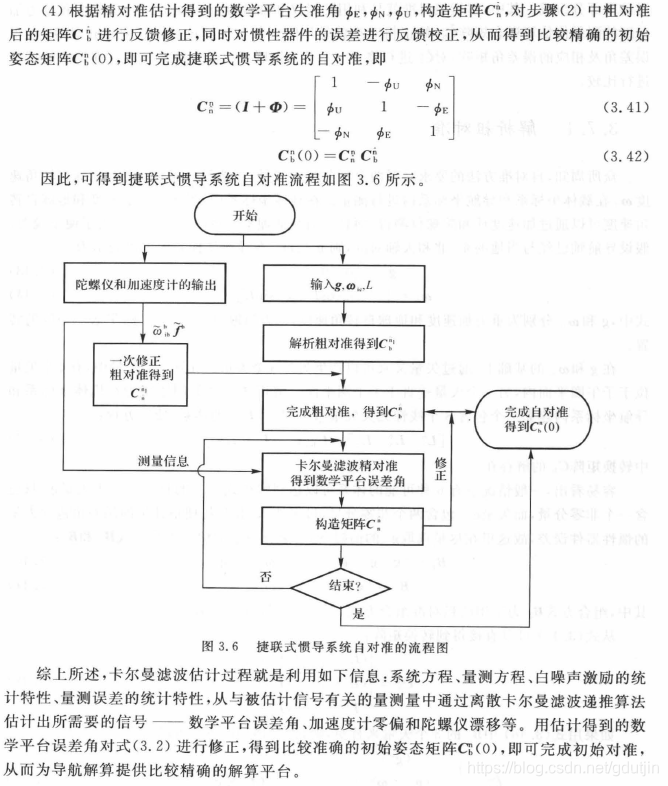
初始对准中,双矢量定姿方法得到粗略的姿态阵,这时通过静基座下输出的速度和失准角误差(估计的姿态阵与真实值之间存在的小量的数学平台失准角
),利用误差做间接卡尔曼滤波,用姿态更新算法得到精对准姿态阵。
有了初始姿态阵,同时通过卫导得到初始位置和初始速度(多普勒),然后就是惯导的过程了。
由于惯导是主要使用积分,因此需要对每个惯导历元输出的结果进行积分。这里就是加速度积分得到速度,速度积分得到位置的过程了。这里位置是东北天坐标系下,后面和卫导松组合时要转换成经纬高(相对应位置在北和东方向的增量分别除子午圈和卯酉圈)。
在惯导和卫导松组合时,以惯导为主系统,惯导和卫导的姿态,位置,速度的差值作为状态量(更多维数时包括加速度,陀螺仪零偏,杆臂误差,时间不同步误差等),每个卫导历元输出一次组合结果。组合是通过卡尔曼滤波求出误差值,将其补偿到INS的结果中。
多传感器融合时,可以采用联邦滤波或者集中滤波,INS和GPS,高度计,磁力计分别组成误差方程进行卡尔曼滤波。这是采用同样的状态量。
0.惯导概述
导航定位原理分类
航位推算(Dead-Reckoning, DR)
磁罗盘+里程计
惯性导航
空间交汇测量(距离、 角度)
经纬仪
GPS
数据库匹配导航
地标定位
地形匹配
惯性传感器得到的所有观测量都是相对于惯性坐标系。
惯性传感器的基本原理是牛顿第二定律
(加速度计 & 陀螺仪, Accelerometer & Gyroscope)
惯性传感器——加速度计
f = a – g (惯导比力方程)
f =加速度计输出(比力, Specific Force)
a =相对于惯性空间的运动加速度
g =地球万有引力
惯性传感器 —— 陀螺仪
定义:一种用于测量相对于惯性参考系的角速率的传感器
机械陀螺 vs.光学陀螺
机械陀螺 (转子陀螺,振动陀螺, …)
光学陀螺: Sagnac 效应
- 激光陀螺 (RLGs)
- 光纤陀螺 (FOGs)
振动陀螺的原理——哥氏效应(Coriolis Effect)
光学陀螺的原理——萨格纳克效应 (Sagnac Effect): 反向传播光束之间的相移正比于旋转速度
ISA, IMU, INS
| Inertial Sensor Assembly (ISA) | 3轴陀螺 + 3轴加速度计; 输出原始传感器数据. |
| Inertial Measurement Unit (IMU) | ISA经误差标定补偿(零偏,比例因子,etc) 和数据转换; 输出补偿后的数据. |
| Inertial Navigation System (INS) | IMU +惯性导航算法 (惯导机械编排); 输出位置、 速度、 姿态角. |
惯性测量单元(IMU)= 3轴加速度计 + 3轴陀螺
平台式与捷联式对比
Features of INS
| 平台式 | 捷联式 | |
| 体积 | 相对较大 | 小 |
| 重量 | 重 | 轻 |
| 成本 | 高 | 低 |
| 性能 | 可达最高精度 | 最高到导航级 |
| 自标定能力 | 有 | 无 |
| 环境适应性 | 对冲击和振动敏感 | 抗冲击和振动 |
惯性导航系统特性
误差随时间和运动距离累积
需要初始信息
成本高、 笨重
完全自主性和高可靠性(军用和航空航天)
导航信息完备、 连续
INS精度等级
| 战略级 Strategic-Grade | 导航级 Navigation-Grade | 战术级 Tactical Grade | 微机械级 MEMS ? | |
| 定位误差 | < 30 m/hr | 0.5 – 2 nmi/hr (70-100k USD) | 10-20 nmi/hr (10-20K USD) | |
| 陀螺零偏 | 0.0001 deg/hr | 大约地球自转的 1/1000, 0.015 deg/hr (1 nmi/hr) | 1- 10 deg/hr | |
| 加速度计零偏 | 1 ug | 50 – 100 ug | 100 – 1000 ug | |
| 应用领域 | 洲际弹道导弹 潜艇 | 通用航空 高精度测绘 | 短时间应用(战 术导弹) 与GPS组合使用 |
陀螺零偏是关键
惯性器件的相对测量能力
以导航级惯导的陀螺为例:陀螺零偏 0.01 deg/hr 陀螺量程 1000 deg/s = 3600,000 deg/hr
相对测量能力= 量程 / 零偏 = 3.6e8 !
等效于测量 武汉—北京 距离, 精度3mm!
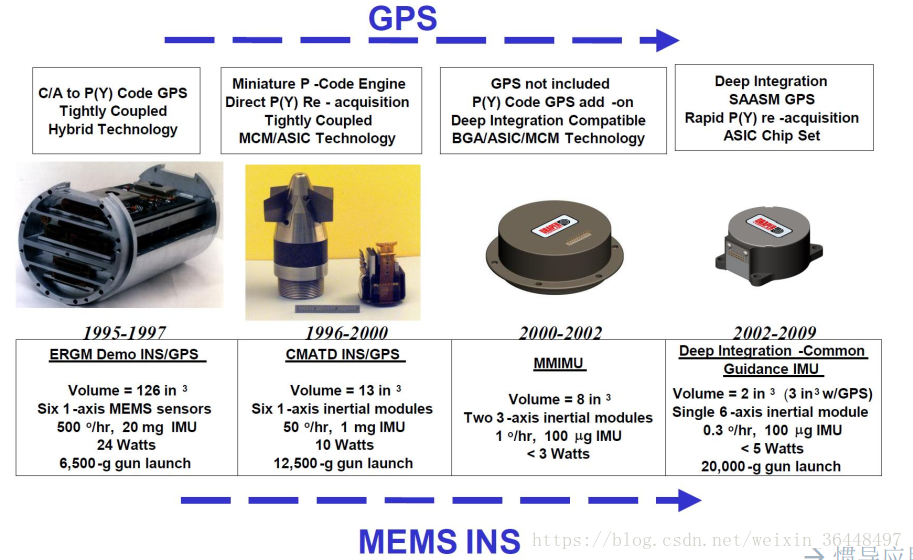
MEMS惯导的演化
传感器误差分类
零偏(Bias, 静态误差、 加性误差)
- 包含噪声(Noise)
比例因子(Scale factor, 动态误差、 乘性误差)
- 包含非线性(non-linearity)
- 轴偏移/轴交叉(Axes misalignment / cross-axis)
基本的误差类型
常值误差(Constant error)
重复性(Repeatability) --multiple runs
稳定性(Stability) -- within one run
噪声和带宽(Noise & Bandwidth)
热敏感度(Thermal sensitivity)


1.静态解析粗对准
2.加速度计位置标定






标定方法总结
- 标定的精度依赖于各轴相对于参考坐标对准的准确性.
- 为了获得准确的标定结果, 需要一些专业设备(如转台或规则的立方体)来获得IMU的精确姿态和旋转角.
- 由于对专业设备的依赖性, 这些标定方法主要设计用于在实验室测试、 厂家校准和对相对较高精度的IMU的标定.
3.INS姿态解算



INS测量
在使用惯导系统做测量应用之前
1. 标定系统, 用来估计加速度计和陀螺仪的零偏和比例因子误差的确定性部分
2. 采集长时间的设备数据, 用来估计加速度计和陀螺的噪声特性(Gauss Marko参数)
3. 利用陀螺的随机游走参数估计初始对准的时长, 用来得到一定的航向角精度(be realistic)
动态模式下进行测试来预测系统性能
1. 检查导航算法实现的正确性, 改善标定参数, 估计测量更新所需要的频率来获
得一定的测量精度.
2. 对于这个测试通常需要一个良好的参考轨迹 (通常是 GPS).
3. 测试通常是沿着一个L形的轨迹.
4.GPS/INS组合导航
松组合采用的是两套独立的系统,惯导系统与卫星接收机系统。其中利用惯导的误差方程作为系统方程,利用惯导输出的位置及速度 与 卫星接收机输出的位置及速度做差,作为系统的量测量。然后进行相应的卡尔曼滤波,利用卡尔曼滤波输出的姿态误差,位置误差以及速度误差对惯导输出的载体位置,速度,姿态进行更新。
惯导误差状态可用以下一阶状态方程表示

为估计和补偿惯导误差, 需要更高精度的外部测量值


假设可获得持续的GPS位置观测值作为量测更新: 观测方程可通过辅助信息PGPS(GPS位置观测值) 与INS位置输出PINS求差得到;用于卡尔曼滤波更新的观测向量Z表示为:

观测向量Z可写成状态量x的函数

如果速度和位置观测值均可用, 则

——————————————————————————————————————————————————————
21维
摘自武汉大学牛小骥老师讲义
GNSS/INS松组合常采用误差状态卡尔曼滤波(间接卡尔曼滤波)进行数据融合, 以解决系统的非线性问题。 根据惯导误差微分方程和传感器误差模型, 将惯性传感器主要误差参数(加速度计和陀螺的零偏及比例因子误差) 增广到卡尔曼滤波的系统状态中, 可得卡尔曼滤波的状态向量及连续时间系统状态方程





________________________________________________________________________________________________
17维
摘自西工大严恭敏老师《捷联惯导算法与卡尔曼滤波原理讲义》