文章目录
- 姿态更新地位
- 反对称矩阵
- 方向余弦矩阵
- 等效旋转矢量
- 四元数
姿态更新地位
在捷联惯导系统的姿态、速度和位置更新算法中,姿态算法对整个系统精度的影响最大,它是算法研究和设计的核心。在非定轴转动情况下,描述姿态运动的微分方程是线性时变的(可视为零输入线性时变系统),其离散化求解会引起转动不可交换误差。现代高精度的陀螺仪往往采用角增量信号输出方式,利用角增量构造等效旋转矢量以补偿和降低不可交换误差,这是目前主流姿态算法的基础。
反对称矩阵
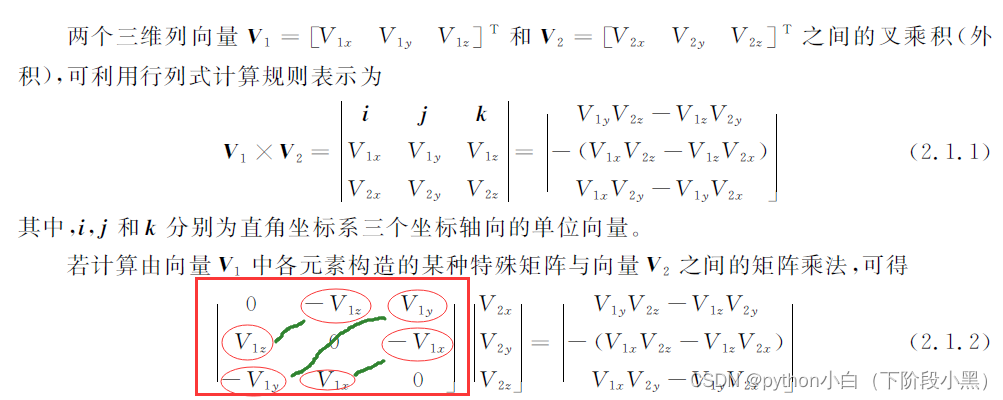
一个向量的反对称阵可以由图中标识的那样构造出来,这样,两向量的叉乘运算,就可以转换为,前一个向量的反对称阵与后一个向量之间的矩阵乘法运算
方向余弦矩阵
方向余弦矩阵的概念可由两个坐标系下的坐标轴上的单位矢量引出
尽管同一个向量在不同坐标系下的表现形式不同,但是它对应的都是同一个向量,因此可由下式表示
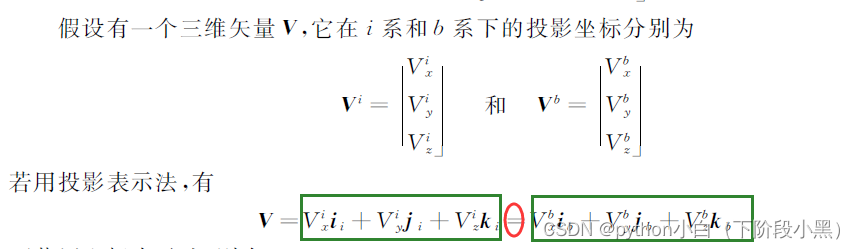
两个单位矢量可由下述公式进行转换,其中,P为从一个系到另一个系的过渡矩阵(或称从从一个系到另一个系的坐标系/基变换矩阵),即

用矩阵形式给出,
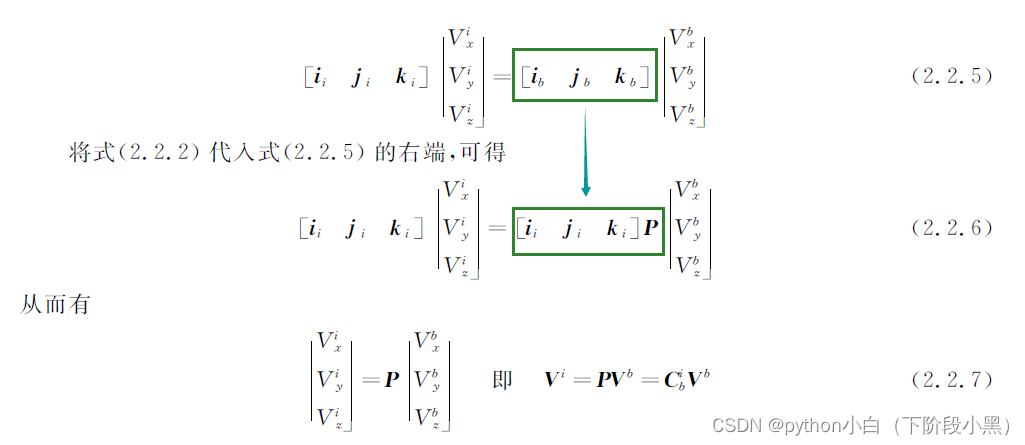
以b系和i系为例,P为从b系到i系的坐标变换矩阵,也就是从i系到b系的坐标系变换矩阵(或过渡矩阵)。特别提示:前半句说的是“坐标变换”,而后半句说的是“坐标系变换”,注意两者说法的区别。
1.坐标变换是将一个向量在b系的投影转换到在i系的投影
2.坐标系变换是指由i系变换到b系的过程

等效旋转矢量
两个直角坐标系之间的旋转变换关系可用方向余弦阵描述。欧拉转动定理(Euler’srotation theorem)表明,刚体(可视为直角坐标系)从一个角位置到另一个角位置的任意转动总能够等效于绕某一固定轴的一次转动,实际上这一固定轴与转角一起就构成了等效旋转矢量的概念。等效旋转矢量的矢量方向表示转轴方向,而模值大小表示旋转角度大小。
下面给出了由等效旋转矢量求解方向余弦矩阵的公式

四元数
四元数(quaternion)的概念最早于1843年由数学家哈密顿(W.R.Hamilton)提出,它可用于描述刚体转动或姿态变换。与方向余弦阵相比,四元数表示方法虽然比较抽象,但却十分简洁。

四元数就是由复数的概念扩充来的。
四元数的乘法表示如下: