1 初始对准简介
1.1 初始对准任务
所谓对准指的是确定惯导系统各坐标轴相对于参考坐标系指向的过程。
捷联式惯导系统初始对准的任务有两项:第一,机体起飞前将初始速度和初始位置引人惯导系统;第二,机体坐标系与导航坐标系的初始变换短阵。另外,有些系统的初始化还包括惯导仪表的校准,
即对陀螺仪的标度系数进行测定,对陀螺仪的漂移进行测定并补偿,对加速度计也同样测定标度系数并存入计算机。初始化过程中对惯性仪表的校准是提高系统精度的重要保证。
对于第一项任务,在静基座情况下,初始速度为零,初始位置为当地的经纬度。在动基座情况下,这些初始条件一般应由外界提供的速度、位置和姿态信息来确定。这一过程比较简单,只要将这些初始信息通过控制器送入飞机上计算机中的捷联计算程序便可。至于第二项任务,一般比较复杂,尤其在动基座情况下,必须对基座的晃动、载体的杆臂效应和弹性变形加以考虑,它是捷联式惯导系统初始对准的主要任务。要求初始变换矩阵与实际机体坐标系相对导航坐标系的变换矩阵相一致,这是一项精度指标。此外,对准时间也是一项重要的指标。
初始对准误差是惯导系统的主要误差源之一,它直接影响惯导系统的性能。初始对准过程具有两种基本类型: 一种是利用陀螺罗经的自对准,另一种是子系统相对主参考基准的对准。
初始对准的精度,其水平精度主要取决于加速度计的零位偏置,而方位精度则主要取决于东西向陀螺仪漂移的大小。
1.2 初始对准分类
按照捷联式惯导系统对准的阶段来分,对准过程分为粗对准和精对准两个阶段。粗对准阶段以重力矢量和地球角速度矢量为信息,利用解析方法进行,其任务是得到粗略的捷联矩阵,为后续的精对准提供基础。此阶段精度可以低一些,但要求速度快。精对准是在粗对准的基础上进行的,通过处理惯性器件的输出信息,精确校正真实导航坐标系与计算的导航坐标系之间的失准角,使之趋于零,从而得到精确的捷联矩阵。
按照捷联式惯导系统初始对准时载体的运行状态来分, 对准可分为静基座对准和动基座对准。顾名思义,静基座对准时载体是不动的,而动基座对准是在载体运动状态下完成的。
按照初始对准时是否需要外部信息分,惯导系统可分为自对准和非自对准。惯导系统利用陀螺罗经的自对准是利用重力矢量和地球自转角速度矢量通过解析的方法实现初始对准的。这种对准方法的优点是自主性强,缺点是所需的对准时间长、精度不高。非自对准可以通过机电或光学方法将外部参考坐标系引人系统,实现惯导系统的初始对准。在捷联式惯导系统的粗对准阶段,可以通过引入主惯导系统的航向姿态信息, 经过传递对准, 迅速将数学平台对准导航坐标系,减小初始失准角(在数据传递时刻, 主惯导系统和子惯导系统之间的任何相对角位移将作为对准误差引人子惯导系统中)。在精对准阶段,可采用受控对准方法, 利用其他导航设备(如GPS ,计程仪等)提供的信息(如速度和位置)作为观测信息,通过卡尔曼滤波实现精对准。
在对准时取地理坐标系为导航坐标系的情况下,初始对准可分为水平对准和方位对准。在平台式惯导系统中,物理平台通常先进行水平对准,然后进行平台的方位对准; 捷联式惯导系统中的数学平台,一般情况下水平与方位对准是同时进行的。
1.3 初始对准常用的方法
地面条件下的静基座初始对准常采用自对准方法。
捷联式惯导系统的初始对准就是确定捷联矩阵的初始值。在静基座条件下,捷联式惯导系统加速度计的输入量为-g,陀螺仪的输入量为地球自转角速度ω 因此g与ω 就成为初始对准的基准。将陀螺仪与加速度计的输出引人计算机,就可以计算出捷联矩阵的初始值。
可见,惯导系统在地面对准时可以利用加速度计和陀螺仪测量的重力加速度矢量和地球自转角速度矢量来完成。但当载体运动时,这两种矢量无法测量,因此动基座对准必须借助外部信息来完成。目前,常用的方法有地球率对准、空间率对准、传递对准。
1.4 初始对准中常用的最优估计方法
提高惯导系统初始对准精度的最佳途径之一,是利用卡尔曼滤波这一重要估计方法进行估计。对于采用自主对准方式的惯导系统, 一般用卡尔曼滤波技术估计系统的失准角和惯导系统误差,然后用一定的控制技术设计出控制角速度使失准角达到规定的要求。卡尔曼滤波的对象是用状态方程来描述随机线性系统,它按照估计误差方差最小的原则,从被污染的观测值中,实时估计出系统的各个状态。它要求系统噪声和观测噪声的统计特性是已知的,并都应为白噪声。如果系统噪声为有色噪声,则需要扩大状态变量,使系统噪声和观测噪声变成白噪声;如果观测噪声为有色噪声, 则需要引人新变量以获取在有色噪声条件下的卡尔曼滤波方程。
初始对准是捷联式惯导系统的一项关键技术, 在各种干扰运动的影响下,系统必须在较短的时间内,以一定的精度确定出从机体坐标系到导航坐标系的姿态转移矩阵。
惯导系统初始对准时常用的几种滤波算法:卡尔曼滤波算法、扩展卡尔曼滤波算法、无迹卡尔曼滤波算法。
1.5 误差方程
捷联式惯导系统的误差方程,包括姿态误差方程、速度误差方程和位置误差方程。
2 捷联式惯导系统自对准流程
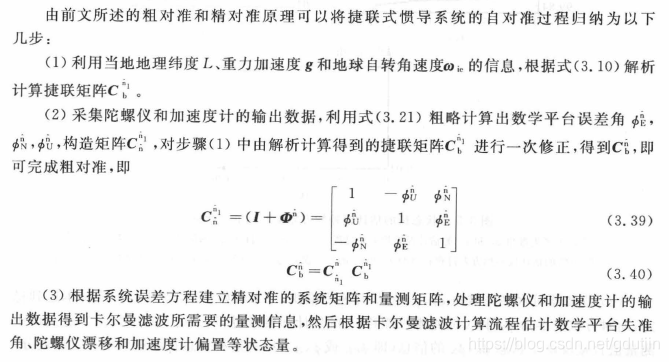
(参见书籍:捷联式惯导系统动、静基座初始对准 [王新龙著] 2013年版 第85页)
3 静基座多位置初始对准方法
多位置初始对准方法主要有三种:最优两位置对准、最优三位置对准以及任意方位多位置对准的方法。
IMU 绕方位轴旋转,可以使系统变成完全可观测的。当从初始位置转动180°到第二个位置,且在两位置处停留相同时间时,可以相互抵消水平陀螺仪的常值漂移误差,提高方位失准角的估计精度。对应该最优两位置对准,方位失准角的估计精度较固定位置提高了大约10 倍,两个水平加速度计偏置的估计误差也大幅下降。但由于绕方位轴旋转使方位陀螺仪常值漂移没有得到补偿,所以两位置对准时其估计精度不高。在两位置的基础上,绕Xs 轴旋转β角比绕Ys 轴旋转γ 角更能降低估计误差。当绕Xs轴从第二个位置转动90°到第三个位置,且在3 个位置处停留相同的时间时,可以相互抵消方位陀螺仪漂移误差,提高其估计精度。由于多位置对准可以提高SINS 的可观测性,所以也就大大提高了系统的对准精度和速度。
4 神经网络技术在静基座初始对准中的应用
由于神经网络具有很好的函数逼近性能,实时性与鲁棒性又非常好,所以可采用神经网络的方法代替卡尔曼滤波方法,用观测值作为输入样本,通过神经网络的学习能力,使网络输出逼近系统所需的状态估计值。这种神经网络是一种静态映射,元动态过程,因此,大大提高了实时性。使用神经网络估计技术,不仅在精度上与卡尔曼滤波精度相当,而且实时性大大优于卡尔曼滤波。应用时可以先用卡尔曼滤波所输出的数据对神经网络进行离线训练,然后再将训练好的神经网络用于在线状态估计。这种基于神经网络的初始对准方法不仅可应用于惯导系统的线性对准模型,而且也适用于惯导系统的非线性对准模型。
(参考书籍: 捷联式惯导系统动、静基座初始对准 [王新龙著] 2013年版)
https://download.csdn.net/download/gdutjin/11176134