毫米波雷达数据处理原理
- 前言
- 基础
- bin文件解读
- 以下我们取1帧进行操作:
- 对数据矩阵进行操作前的转换——
- 开始计算结果矩阵
- 一维FFT(距离)
- 二维FFT(速度)
- 角度维FFT
- (假设利用结果已经获取目标)对目标进行计算,得出距离速度角度信息
- 结束
前言
原始数据bin文件包可以由结束语下第一个链接获取
由于网上可以找到很多毫米波雷达处理的流程都是基于抽象原理讲解。所以本文章将会基于实际例子进行数据转换的说明。
小编也是刚入门毫米波雷达,如若有讲解不对的地方还请指出。
在未来的几个月里,小编将会把此次处理过程制作成为动画发布,届时将把链接附上,所以文章中如有不对的地方还请大神帮助指出。
11.17日笔记:(小编太懒了,就先不出动画了)
本篇文章基于TI AWR1642雷达生成的.bin文件数据进行说明,同样适用于其他TI系列雷达。
基础
我们将对毫米波雷达的基本参数进行说明,在后续的使用中将会涉及到它们:
(以下名词前4个由下包含至上的结构进行排列,5、6为硬件基础)
- IQ正交采样 复数形式,采样方式决定基本单位大小,正交采样为32bit即4个字节(实数16bit,2个字节,虚数16bit,2个字节)(所以读取第xx帧的时候要多乘个2);
- 采样点数 sampls ,每次脉冲的采样点数;
- 脉冲 chirps 每次脉冲即是一次发射,雷达需要发射n次脉冲以达到1帧;
- 帧数 每帧包含n次脉冲。
- 发射天线 TX发射天线数量;
- 接收天线 RX 接收天线数量;
此次文件设定采样的参数:
2 字节 IQ正交采样
256 sampls 采样点数
128 chirps 脉冲数
1 TX 发射天线
4 RX 接收天线
bin文件解读
1642SRR2m.bin文件为采样回读的文件,大小为125 MB (131,072,000 字节)。
其包含了250帧数据。
1帧解析:4字节x256samplsx128chirpsx4RXx1TX=524288字节
即524288*250=131,072,000字节
读取出的结构(实际是根据操作过程猜测的数据,咱也不知道为啥是这样的??)(目前认为极有可能是TI采用的硬件加速的独用ram有关):
实数1
实数2
虚数1
虚数2
实数3
实数4
虚数3
虚数4
…
…
…
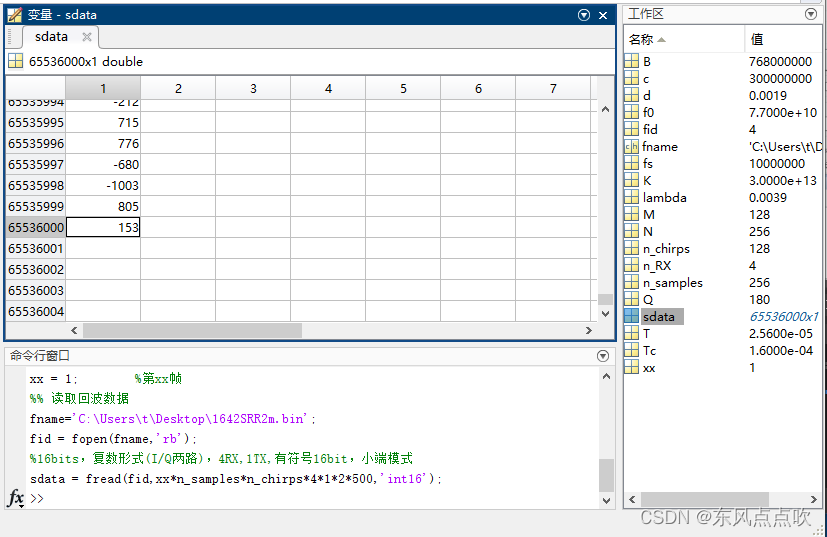
将bin文件读入到matlab中可以看到一共存在65536000行数据
1帧:524288字节(由于实数虚数的长度为16bit而不是8bit,所以每行数据的单位是16bit而不是8bit)
1帧:262144行
以下我们取1帧进行操作:
在读取出bin原始数据后和对其进行计算前需要将其转换成合适的矩阵格式以方便计算。
对数据矩阵进行操作前的转换——
由 262144行1列数据经过实数虚数结合后:
变为 1行131072列数据:

对数据进行矩阵排列,变为:chirps/TX行,samples·RX·TX列:

再变换为以发送通道作为行数的阵列(RX*TX):

最终变换(三维数组,samples行*chirp列):

开始计算结果矩阵
排列好的数据需要经过一维FFT(距离维FFT),二维FFT(速度维FFT),以及角度维FFT计算。
FFT:快速傅里叶变换
下面将以matlab语言进行展示程序
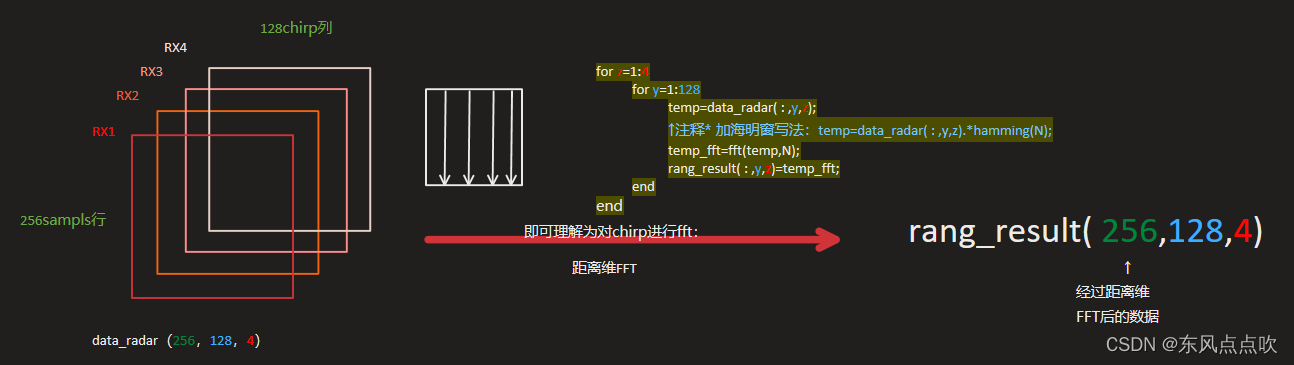
一维FFT(距离)
可以理解为对每组chirp进行FFT(个人理解):
N为FFT点数,取N=sampls。
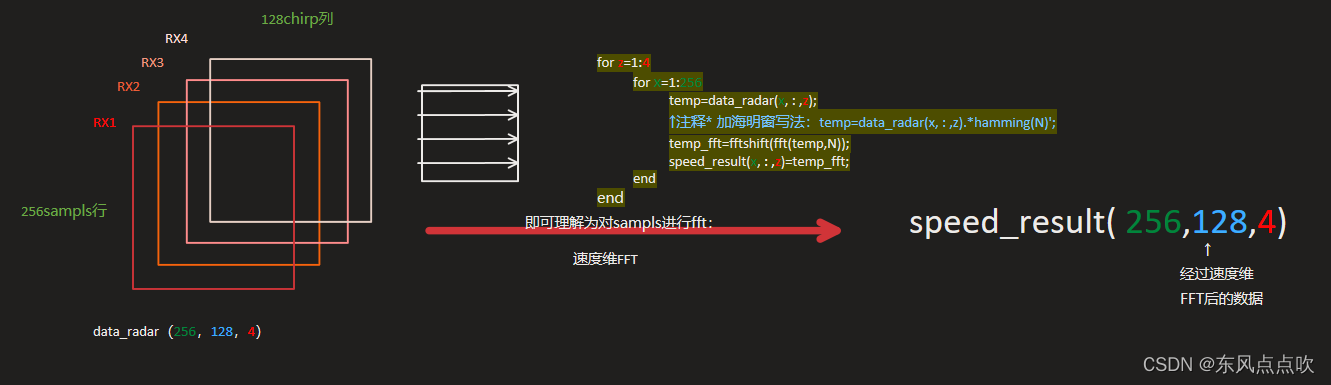
二维FFT(速度)
可以理解为对每组sampls进行FFT(个人理解):
N为FFT点数,取N=chirp。
fft_shift:将零频点移动到频谱中央(因为速度存在正负)
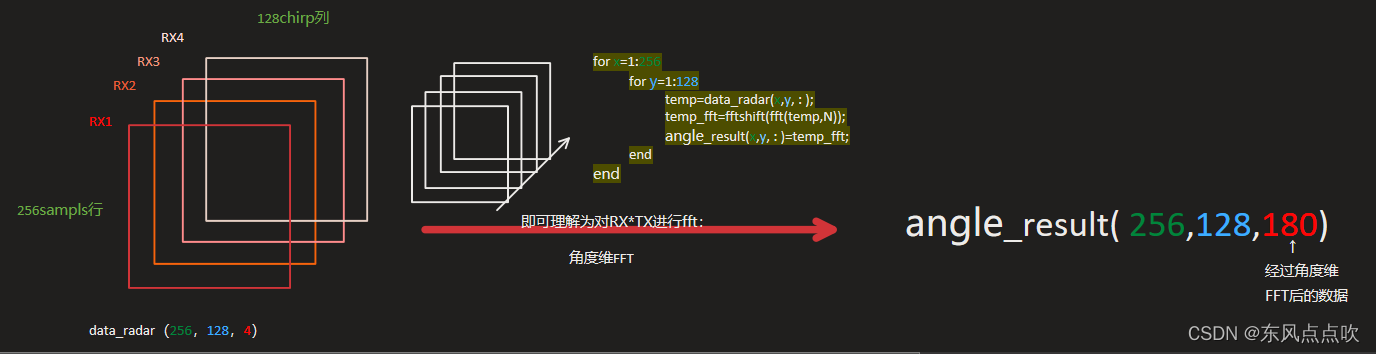
角度维FFT
可以理解为对每组RX*TX通道进行FFT(个人理解):
N为FFT点数,取N=180。
fft_shift:将零频点移动到频谱中央(因为角度存在正负)
(假设利用结果已经获取目标)对目标进行计算,得出距离速度角度信息
已知获得的目标位置[row,col,pag](可以利用峰值计算单个目标,可以利用CFAR计算多个目标)
以下参数为用户雷达设定的参数,全部已知(部分参数请参 照参考文章1 代码部分)
fb = ((row-1) × fs)/N; %差拍频率 fs:采样率/N:一维FFT点数
fd = (col-M/2-1)/(M × Tc); %多普勒频率 M:二维FFT点数/Tc:chirp总周期
fw = (pag-Q/2-1)/Q; %空间频率 Q:角度FFT点数
R = c × (fb-fd)/2/K; %距离公式 ****
v = lambda × fd/2; %速度公式 lambda:波长
theta = asin(fw × lambda/d); %角度公式 d:天线阵列间距
angle = theta × 180/pi;
得出:
目标距离:R m
目标速度:v m/s
目标角度:angle °
结束
参考文章:
1.回波3DFFT处理(测距、测速、测角):
此博主包含原始bin文件,需要用网盘下载。请支持博主一下
2.调皮连续波:TI毫米波雷达IWR6843ISK室内人员检测算法(附MATLAB程序和数据)
此博主有公众号,大家可以关注。
如有不对之处还请大家帮忙指正
1.11.17-感谢某位研究生纠正前方TX/RX搞反的情况
2.11.18-之前一维二维FFT的对象搞反了,这里请注意冒号的用法。









![[控制算法]](https://img-blog.csdnimg.cn/c0b83b286f664051b930b5519a7d5981.png)