使用python模拟实现PID控制算法
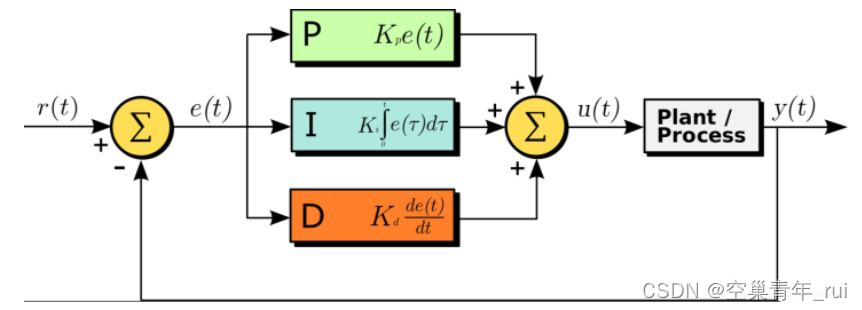
PID控制算法是工业应用中最广泛算法之一,在闭环系统的控制中,可自动对控制系统进行准确且迅速的校正。
P、I、D分别是“比例(proportional)、积分(integral)、微分(derivative)”三个单词的首字母,他们分别对应算法中使用的三个参数。
有关于PID算法的详细内容请自行查阅相关资料,参考文章。
常用的PID控制算法有位置式和增量式两种形式,下面给出他们的python实现:
1. 位置式
位置式PID离散公式: u ( k ) = K p e k + K i ∑ i = 1 k e ( i ) Δ t + K d e ( k ) − e ( k − 1 ) Δ t u(k)=K_pe_k+K_i\sum_{i=1}^{k}{e(i)\Delta{t}+K_d\frac{e(k)-e(k-1)}{\Delta{t}}} u(k)=Kpek+Ki∑i=1ke(i)Δt+KdΔte(k)−e(k−1)
位置式可以简单理解为算法每次计算得出值的都是要走到的点。如我们的目标是让一辆车前进10米,算法第一次计算得出的值是7.3,则表示车第一次运动来到了7.3米的位置。
class PositionPID(object):"""位置式PID算法实现"""def __init__(self, target, cur_val, dt, max, min, p, i, d) -> None:self.dt = dt # 循环时间间隔self._max = max # 最大输出限制,规避过冲self._min = min # 最小输出限制self.k_p = p # 比例系数self.k_i = i # 积分系数self.k_d = d # 微分系数self.target = target # 目标值self.cur_val = cur_val # 算法当前PID位置值,第一次为设定的初始位置self._pre_error = 0 # t-1 时刻误差值self._integral = 0 # 误差积分值def calculate(self):"""计算t时刻PID输出值cur_val"""error = self.target - self.cur_val # 计算当前误差# 比例项p_out = self.k_p * error # 积分项self._integral += (error * self.dt)i_out = self.k_i * self._integral# 微分项derivative = (error - self._pre_error) / self.dtd_out = self.k_d * derivative# t 时刻pid输出output = p_out + i_out + d_out# 限制输出值if output > self._max:output = self._maxelif output < self._min:output = self._minself._pre_error = errorself.cur_val = outputreturn self.cur_valdef fit_and_plot(self, count = 200):"""使用PID拟合setPoint"""counts = np.arange(count)outputs = []for i in counts:outputs.append(self.calculate())print('Count %3d: output: %f' % (i, outputs[-1]))print('Done')# print(outputs)plt.figure()plt.axhline(self.target, c='red')plt.plot(counts, np.array(outputs), 'b.')plt.ylim(min(outputs) - 0.1 * min(outputs), max(outputs) + 0.1 * max(outputs))plt.plot(outputs)plt.show()
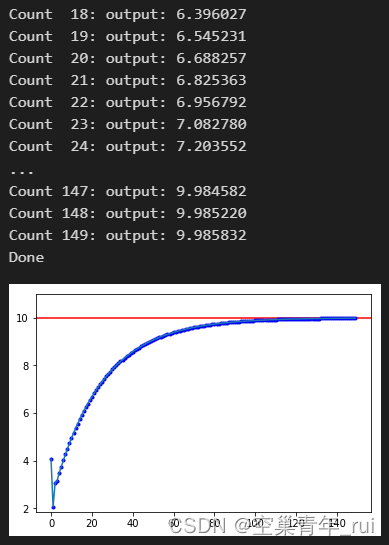
运行测试:
pid = PositionPID(10, -5, 0.5, 100, -100, 0.2, 0.1, 0.01)
pid.fit_and_plot(150)
2. 增量式
增量式PID离散公式: Δ u ( k ) = K p ( e ( k ) − e ( k − 1 ) ) + K i e ( k ) + K d ( e ( k ) − 2 e ( k − 1 ) + e ( k − 2 ) ) \Delta{u(k)}=K_p(e(k)-e(k-1))+K_ie(k)+K_d\big(e(k)-2e(k-1)+e(k-2)\big) Δu(k)=Kp(e(k)−e(k−1))+Kie(k)+Kd(e(k)−2e(k−1)+e(k−2))
增量式可以简单理解为算法每次的计算值都是本次移动的步长。如我们的目标是让一辆车前进10米,车辆的当前位置在3米处,算法本次计算得出的值是2.5,则表示车本次需要前进2.5米,来到了5.5米的位置。
class DeltaPID(object):"""增量式PID算法实现"""def __init__(self, target, cur_val, dt, p, i, d) -> None:self.dt = dt # 循环时间间隔self.k_p = p # 比例系数self.k_i = i # 积分系数self.k_d = d # 微分系数self.target = target # 目标值self.cur_val = cur_val # 算法当前PID位置值self._pre_error = 0 # t-1 时刻误差值self._pre_pre_error = 0 # t-2 时刻误差值def calcalate(self):error = self.target - self.cur_valp_change = self.k_p * (error - self._pre_error)i_change = self.k_i * errord_change = self.k_d * (error - 2 * self._pre_error + self._pre_pre_error)delta_output = p_change + i_change + d_change # 本次增量self.cur_val += delta_output # 计算当前位置self._pre_pre_error = self._pre_errorself._pre_error = errorreturn self.cur_valdef fit_and_plot(self, count=200):counts = np.arange(count)outputs=[]for i in counts:outputs.append(self.calcalate())print('Count %3d: output: %f' % (i, outputs[-1]))print('Done')plt.figure()plt.axhline(self.target, c='red')plt.plot(counts, np.array(outputs), 'b.')plt.ylim(min(outputs) - 0.1 * min(outputs),max(outputs) + 0.1 * max(outputs))plt.plot(outputs)plt.show()
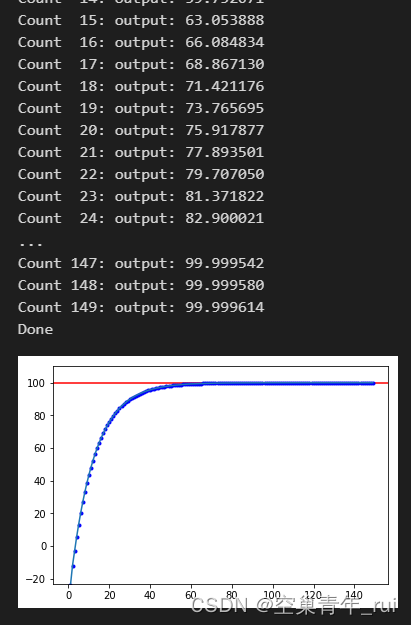
运行测试:
pid = DeltaPID(100, -80, 0.5, 0.2, 0.1, 0.001)
pid.fit_and_plot(150)
注意
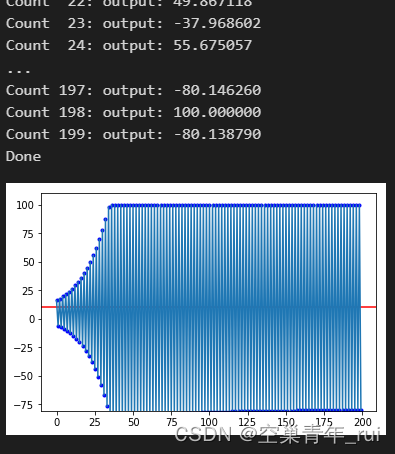
算法中P、I、D三个超参数的初始值对算法的影响很大,不合适的设置可能会导致算法不收敛。调参方法可以搜索相关资料。
如,在位置式算法中,我们使用和上面例子同样的目标值和初始值,改变参数值:
# 不合适的参数值
pid = PositionPID(10, -5, 0.5, 100, -100, 1, 0.1, 0.01)
pid.fit_and_plot()
![[控制算法]](https://img-blog.csdnimg.cn/c0b83b286f664051b930b5519a7d5981.png)