状态防火墙
状态检测防火墙(Stateful Firewall)是一种网络安全设备,它可以检测和过滤网络流量,以保护网络不受未经授权的访问和攻击。
与传统的包过滤防火墙不同,状态检测防火墙可以跟踪网络连接的状态,并根据网络连接的状态来决定是否允许或拒绝特定的网络流量。这种防火墙可以在网络层和应用层对网络流量进行检测和过滤,因此可以提供更强大的安全保护。
工作流程—首包匹配策略表,转发匹配会话表
1.配置规则:管理员需要配置防火墙规则,以定义允许或拒绝特定类型的网络流量。规则可以基于源IP地址、目标IP地址、协议类型、端口号等因素。
2.建立连接:当网络中的主机尝试与其他主机通信时,状态检测防火墙会尝试建立连接。如果建立连接请求符合防火墙规则,则连接会被允许建立。
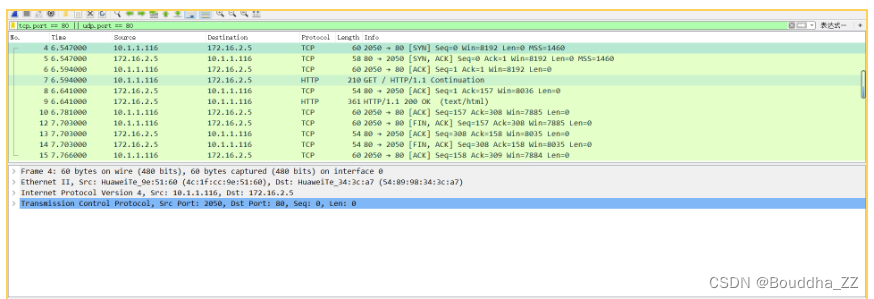
3.跟踪状态:状态检测防火墙会跟踪网络连接的状态,例如TCP连接的状态,包括SYN、SYN-ACK、ACK等状态。此外,防火墙还可以跟踪其他协议和服务的状态,例如HTTP连接的状态。
4.检测和过滤数据包:状态检测防火墙会检测和过滤网络流量。当数据包到达防火墙时,防火墙会检查数据包的源IP地址、目标IP地址、协议类型、端口号等信息,以确定数据包是否符合防火墙规则。如果数据包符合规则,则数据包会被允许通过。否则,数据包将被拒绝,并且可能会被防火墙记录下来以供以后的审计和分析。
5.终止连接:当网络连接终止时,状态检测防火墙会根据连接的状态和防火墙规则来终止连接。
总体来说,状态检测防火墙通过检测和过滤网络流量来保护网络不受未经授权的访问和攻击。管理员需要配置防火墙规则,并定期更新规则以确保防火墙的有效性。状态检测防火墙是一种重要的网络安全设备,可以帮助组织提高网络的安全性和可靠性。
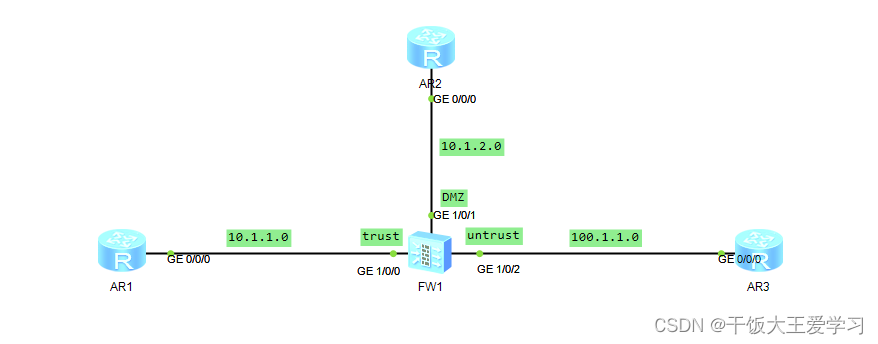
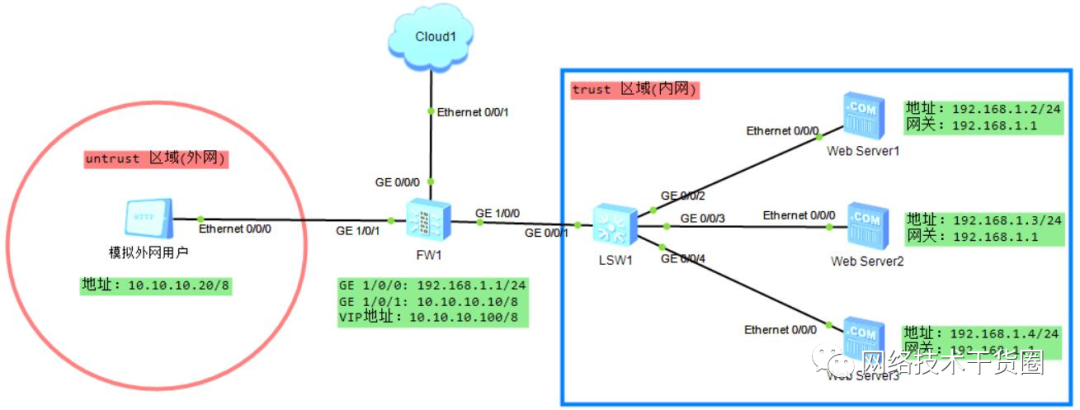
实验
基础接口配置

LW1
[Huawei]vlan 2
[Huawei-GigabitEthernet0/0/1]port link-type access
[Huawei-GigabitEthernet0/0/1]port default vlan 2
[Huawei-GigabitEthernet0/0/1]int vlan 2
[Huawei-Vlanif2]ip add 10.1.255.1 24
[Huawei]vlan 3
[Huawei-GigabitEthernet0/0/2]port link-type access
[Huawei-GigabitEthernet0/0/2]port default vlan 3
[Huawei-GigabitEthernet0/0/2]int vlan 3
[Huawei-Vlanif3]ip add 10.1.3.1 24
[Huawei]ip route-static 0.0.0.0 0 100.1.255.2
AR1
[ISP-GigabitEthernet0/0/0]ip add 100.1.1.2 24
[ISP-GigabitEthernet0/0/1]ip add 200.1.1.1 24
[ISP]ip route-static 0.0.0.0 0 100.1.1.1
LW2
[DMZ]int Eth-Trunk 1
[DMZ-Eth-Trunk1]trunkport g0/0/1
[DMZ-Eth-Trunk1]trunkport g0/0/2
[DMZ-Eth-Trunk1]port link-type trunk
[DMZ-Eth-Trunk1]port trunk allow-pass vlan 10 to 11
[DMZ-GigabitEthernet0/0/4]port link-type access
[DMZ-port-group-default]port default vlan 10
[DMZ-GigabitEthernet0/0/3]port link-type access
[DMZ-port-group-default]port default vlan 11
防火墙策略配置