Pixhawk copter固件的默认参数是为3DR QUAD COPTER设计的。如果你想获得一个最佳的飞行表现的话。你需要对一些参数做一些调整。调整的参数主要是Extended Tuning下面的Roll和Pitch的PID,来获得稳定的姿态。
在copter的参数调整里边比较重要的参数主要是Roll、Pitch、yaw、Altitude hold、loiter、和waypoint navigation 的调整。
在上面的几个参数里边最重也是最基本的就是Roll/Pitch的调整。通常情况下在调整Roll/Pitch的PID的时候最好是在stabilize 模式下进行调整,在获得满意的飞行姿态以后再切换到Alt hold模式下继续调整,然后是Loiter模式下进行调整,最后才是在AUTO模式下进行航线飞行调整。
Roll/Pitch的调整
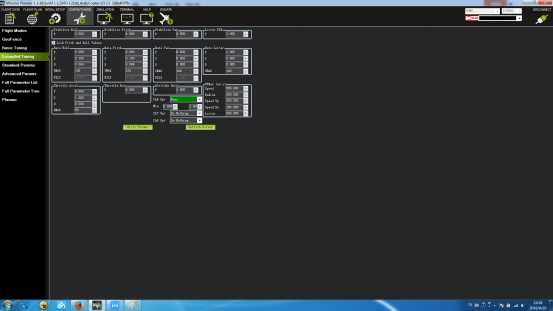
Roll/Pitch主要是调整stabilize Roll/Pitch 和Rate Roll/Pitch 的调整。下图中黄色凸显的区域。
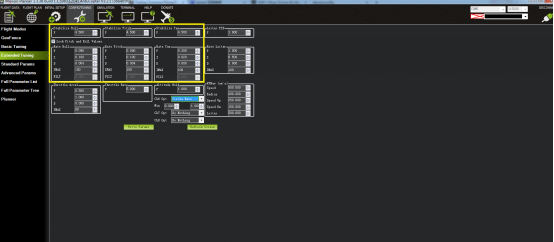
stabilize Roll/Pitch 的P值是将期望的角度转换为一个期望的旋转值,然后送给Rate Roll/Pitch控制器。(注意:较大的p值会导致飞行器对控制输入非常敏感,过小会导致飞行器动作迟钝,过大则会导致RaRoll/Pitch轴的振荡。)
Rate Roll/Pitc的P值是将期望的旋转速率转化为电机的输出。(通俗的讲也就是响应的速度?)
如何客观的评价Roll/Pitch的PID是不是合理?其中一个方法就是用log工具分析log重的
Pixhawk参数调整
article/2025/9/29 7:40:29
相关文章

飞控pixhawk硬件框架
本文转载于:https://blog.csdn.net/csshuke/article/details/78952026  1.Phxhawk连接线路 2.Phxhawk硬件芯片列表 处理器 STM32F427 VIT6 (168 Mhz/256 KB RAM/2 MB 闪存 100Pin)32位 STM32F100C8T6 (48Pin)故障保…
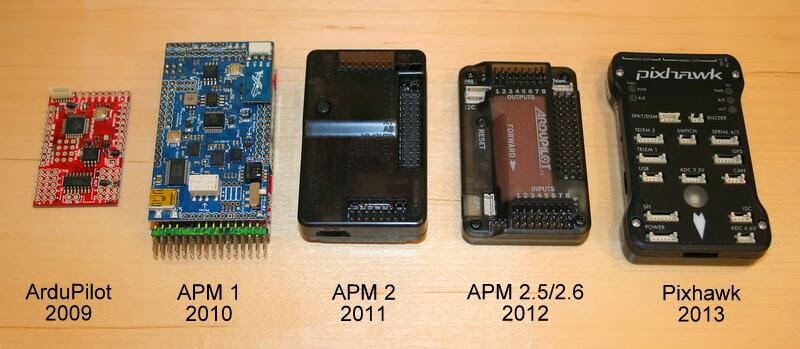
Pixhawk的历史
发展历程:APM-->PX4FMU/IO-->Pixhawk: 1、Arduino简介 Arduino就是主要以以AVR单片机为核心控制器的单片机应用开发板(当然也有其他核心的例如STM32版本的但是不是官方的,还有intel的伽利略),或者是学…
pixhawk 学习笔记
1.pixhawk4硬件:
Main FMU Processor: STM32F765 32 Bit Arm Cortex-M7, 216MHz, 2MB memory, 512KB RAMIO Processor: STM32F100 32 Bit Arm Cortex-M3, 24MHz, 8KB SRAMOn-board sensors: Accel/Gyro: ICM-20689Accel/Gyro: BMI055Magnetometer: IST8310Baromete…

pixhawk计算机无法识别,PIXHAWK教程 3.1.2 连接你的遥控输入和电机(Pixhawk)
连接你的遥控输入和电机(Pixhawk) 目录 连接你的遥控输入和电机(Pixhawk) 连接蜂鸣器和安全开关 连接其他外部设备 连接遥控输入 连接电机输入 安装螺旋桨 顺时针和逆时针桨的识别 连接蜂鸣器和安全开关 蜂鸣器和安全开关依附于Pixhawk。 分别连接到蜂鸣器和开关端口。 连接其他…

pixhawk连接到nvidia xavier
实物是bluerov。固件是ardusub,
https://www.ardusub.com/
上图中右下角蓝usb一端接pixhawk,另外一端接xavier。xavier上运行
$ls /dev/ttyA*
会增加设备/dev/ttyACM0
在xavier端安装好各种mavlink mavproxy 软件包。
$ xargs -a "/home/pcl/mavproxy…
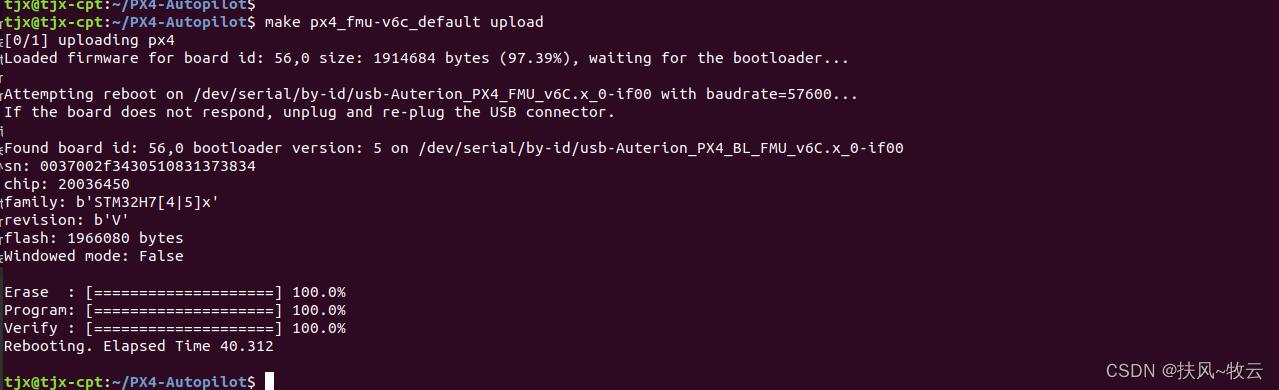
Pixhawk6c编译
以前一直用pixhawk4以及4mini,版本1.11,这两款目前停产,6x也快停产,没什么货源了。只能试试6c。
一:下载
流程:按照官网的流程,先git clone 输入:
git clone https://github.com/…

pixhawk使用WiFi模块
pixhawk使用WiFi 前期准备刷固件安装刷固件软件进入刷固件模式下载固件刷固件 使用接线飞控参数更改使用方法 在使用pixhawk的时候有时候在无人机上不方便搭载处理器,这个时候进行外部控制。或者QGC有线方式连接无人机不方便的时候就需要通过WiFi来连接了。 使用ESP…


使用者——初见Pixhawk
是什么 Pixhawk简单介绍 直接使用二次开发 Pixhawk总体概述怎么用 Pixhawk初次使用 搭建调试环境初始化配置测试试飞调整参数提高性能 (是什么) Pixhawk简单介绍 PixHawk是著名飞控厂商3DR推出的新一代独立、开源、高效的飞行控制器,前身为APM飞控&…
Pixhawk基础—认识Pixhawk
Pixhawk简介
pixhawk是由3DR联合APM小组与PX4小组于2014年推出的飞控PX4的升级版,它同时拥有PX4和APM两套固件和相应的地面站软件。该飞控是目前全世界飞控产品中硬件规格最高的产品。
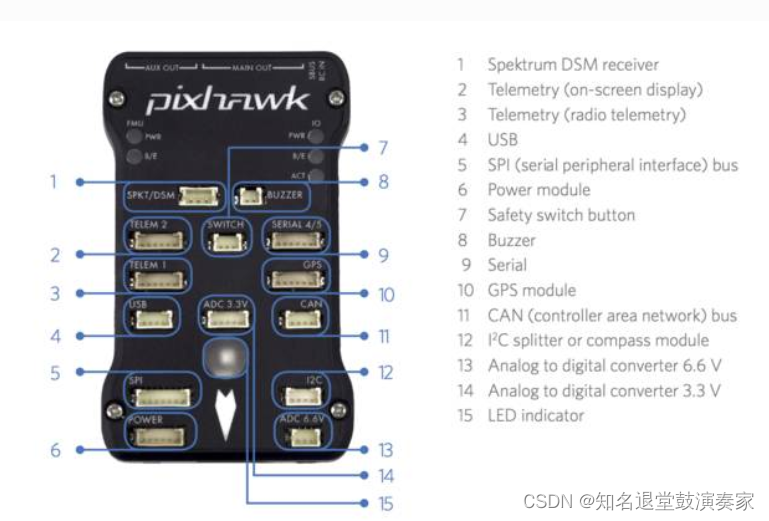
Pixhawk基础
端口介绍 1、Spektrum DSM receiver(Spektrum DSM信号转换为PWM…

pixhawk入门知识
Pixhawk是一种先进的自动驾驶仪,由PX4开放硬件项目设计和3D机器人制造。它具有来自ST公司先进的处理器和传感器技术,以及NuttX实时操作系统,能够实现惊人的性能,灵活性和可靠性控制任何自主飞行器。Pixhawk旗舰版模块将伴随着新的…

实验室无人机平台 Pixhawk 2.4.8 / PX4 v1.9.2
实验室无人机平台及相关应用
无人机平台 目录 实验室无人机平台及相关应用无人机平台1. 硬件1.1 无人机本体1.1.1 四旋翼无人机机架1.1.2 Pixhawk 2.4.8 飞控板1.1.3 电调1.1.4 分电板1.1.5 锂电池1.1.6 电机1.1.7 遥控模块 1.2 机载电脑与传感器1.2.2 激光雷达1.2.3 双目相机…

Pixhawk系统架构介绍
前段时间导师叫我做扑翼无人机,工程上需要实现的,能够通过程控飞起来,感觉难度挺大。先从研究PX4开始,打算一步步理解透整个PX4的框架,机型的适配、旋翼、固定翼的姿态控制,新机型的添加等等。不知道能不能…

企业要求程序员统一电脑桌面,网友:桌面壁纸都不配拥有?
在职场上经常会遇到一些奇葩的规定,相信不少人都遇到过,因为在公司打工,所以面对这些奇葩规定也是很无奈,只能选择妥协,那么大家都遇到过哪些奇葩的规定呢?最近就在职场论坛看到一个公司的奇葩规定。
一家…

晒一晒程序员们的办公桌面都是怎么样的~
晒一晒程序员们的办公桌面都是怎么样的~各有千秋
图片来源知乎,原作者看水印哈~~ 欢迎大家加入小编创建的Python行业交流群,有大牛答疑,有资源共享,
有企业招人!是一个非常不错的交流基地!群号:…



CSDN博文精选:Android系列开发博客资源汇总
CSDN博客本期热文推荐,为您介绍有关Android应用开发的10个博客,分享他们的日积月累的宝贵经验,希望这些文章对Android开发者们能有所启发和帮助。 [1] 张国威:Android从入门到提高系列
前面写了十四篇关于界面的入门文章…