本文转载于:https://blog.csdn.net/csshuke/article/details/78952026
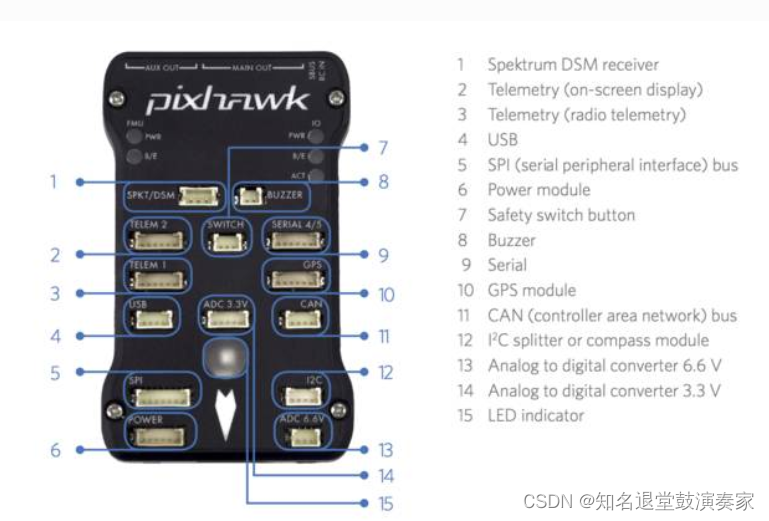
1.Phxhawk连接线路

2.Phxhawk硬件芯片列表

- 处理器
- STM32F427 VIT6 (168 Mhz/256 KB RAM/2 MB 闪存 100Pin)
- 32位 STM32F100C8T6 (48Pin)故障保护协处理器 ,平常用来控制输入信号采集(“Big – Little ”架构)
- 晶振 24MHz 精度 15ppm 3325封装
- 传感器
- Invensense MPU6000 三轴加速度计/陀螺仪
- ST Micro L3GD20 16位陀螺仪
- ST Micro LSM303D 14位加速度计/磁力计
- MEAS MS5611气压计
- 处理
- 双 加速度计 MPU6000 1KHZ LSM303D 800HZ (消除1KHZ 共振)
- 双 陀螺仪 取平均
- 双 罗盘 一个内置一个外置 ,备用
- 双 GPS 基于锁定状态和星数选择切换(或更复杂的切换机制、并可对比测试性能)
- 其它
- FM25V01 128K 非易失闪存
- TXS0108 通用电平驱动芯片(Usart 、舵机输出),隔离/增强驱动,无TTL转232功能
- LTC4417 电源管理芯片
- MIC5332 双输出超低压降 LDO
- BQ24315 电池管理芯片
- TCA62724 三色LED灯专用芯片
- LT3469 信号采集运放
- 可外接 MS4522D 数字差压空速计 (6.6V ADC 输入)
空速计---IIC接口
电源管理SMbus---IIC
航灯接口---IIC
BMA180角速度传感器----SPI
地磁HMC5883---IIC/SPI
L3GD20陀螺仪----SPI
LSM303D角速度/地磁-----SPI
超声波MB12xx----IIC
MD25---IIC
MPU6000----SPI
MS5611气压计----SPI
板载灯控制器TCA62724FMG-----IIC
PC8574(IIC转并) ----IIC
PCA9685(IIC/PWM)-----IIC
光流模块----IIC
4.pixhawk硬件构架

(1)对照原理图查看所有传感器及接口方式,在F4上的接口;
(2)研究下F4和F1的沟通连接方式,以及F1的主要任务;
(3)基于以上两点,结合框架文档丰富对硬件架构的认识;
规定以下没有括号()的表示网络标号,有括号()的表示具体引脚
stm32f427
Invensense MPU6000 三轴加速度计/陀螺仪
PC2(stm32f427)---MPU_CS---CS(MPU6000)
PA6(stm32f427)---SPI_INT_MISO---AD0/SDO(MPU6000)
PD15(stm32f427)---MPU_DRDY---INT(MPU6000)
PA7(stm32f427)---SPI_INT_MOSI---SDA/SDI(MPU6000)
PA5(stm32f427)---SPI_INT_SCK---SCL/SCLK(MPU6000)
电源VDD_3V3_SENSORS
ST Micro L3GD20 16位陀螺仪
PC13(stm32f427)---GYRO_CS---CS(L3GD20)
PA6(stm32f427)---SPI_INT_MISO---SDO/SA0(L3GD20)
PB0(stm32f427)---GYRO_DRDY---INT(L3GD20)
PA7(stm32f427)---SPI_INT_MOSI---SDA/SDI/SDO(L3GD20)
PA5(stm32f427)---SPI_INT_SCK---SCL/SPC(L3GD20)
电源VDD_3V3_SENSORS
ST Micro LSM303D 14位加速度计/磁力计
PC15(stm32f427)---ACCEL_MAG_CS---CS(LSM303D)
PA6(stm32f427)---SPI_INT_MISO---SDO/SA0(LSM303D)
PB4(stm32f427)---ACCEL_DRDY---INT1(LSM303D)
PA7(stm32f427)---SPI_INT_MOSI---SDA/SDI/SDO(LSM303D)
PA5(stm32f427)---SPI_INT_SCK---SCL/SPC(LSM303D)
PB1(stm32f427)---MAG_DRDY---INT2(LSM303D)
电源VDD_3V3_SENSORS
MEAS MS5611气压计
PD7(stm32f427)---BARO_CS---CS(MS5611)
PA6(stm32f427)---SPI_INT_MISO---SDO (MS5611)
PA7(stm32f427)---SPI_INT_MOSI---SDI/SDA (MS5611)
PA5(stm32f427)---SPI_INT_SCK---SCLK(MS5611)
电源VDD_3V3_SENSORS
存储器
PB13(stm32f427)---FRAM_SCK---C(FM25V01)
PB14(stm32f427)---FRAM_MISO---Q(FM25V01)
PB13(stm32f427)---FRAM_MOSI---D(FM25V01)
PD10(stm32f427)---FRAM_CS---S(FM25V01)
电源FMU-VDD_3V3
高亮LED
PB8(stm32f427)---FMU-I2C1_SCL
PB9(stm32f427)---FMU-I2C1_SDA
PB10(stm32f427)---FMU-I2C2_SCL
PB11(stm32f427)---FMU-I2C1_SDA
USB
PA9(stm32f427)---VBUS 电源
PA11(stm32f427)---OTG_FS_DM
PA12(stm32f427)---OTG_FS_DP
PC0(stm32f427)--- VBUS_VALID USB电源有效标志
TF卡
PC8(stm32f427)---SDIO_D0
PC9(stm32f427)---SDIO_D1
PC10(stm32f427)---SDIO_D2
PC11(stm32f427)---SDIO_D3
PC12(stm32f427)---SDIO_CK
TEL2_OSD
PD8(stm32f427)---FMU-USART3_TX
PD9(stm32f427)---FMU-USART3_RX
PD11(stm32f427)---FMU-USART3_CTS
PD12(stm32f427)---FMU-USART3_RTS
TEL1_数传
PD3(stm32f427)---FMU-USART3_ CTS
PD4(stm32f427)---FMU-USART3_ RTS
PD5(stm32f427)---FMU-USART3_TX
PD6(stm32f427)---FMU-USART3_RX
面板GPS
PA0(stm32f427)---FMU-UART4_TX
PA1(stm32f427)---FMU-UART4_RX
面板CAN
PD0 (stm32f427)---CAN1_RX
PD1 (stm32f427)---CAN1_TX
6路辅助PWM
PE14(stm32f427)---FMU-CH1
PE13(stm32f427)---FMU-CH2
PE11(stm32f427)---FMU-CH3
PE9 (stm32f427)---FMU-CH4
PD13(stm32f427)---FMU-CH5
PD14(stm32f427)---FMU-CH6
LED
PE12(stm32f427)---FMU-LED_AMBER
stm32f427与stm32f100连接
PC6(stm32f427)---SERIAL_FMU_TO_IO---PA3(stm32f100)
PC7(stm32f427)---SERIAL_IO_TO_FMU---PA2(stm32f100)
stm32f100
8路主PWM
PA0(stm32f100)---IO-CH1
PA1(stm32f100)---IO-CH2
PB8(stm32f100)---IO-CH3
PB9(stm32f100)---IO-CH4
PA6(stm32f100)---IO-CH5
PA7(stm32f100)---IO-CH6
PB0(stm32f100)---IO-CH7
PB1(stm32f100)---IO-CH8
安全开关
PB5(stm32f100)---SAFTY
LED
PB13(stm32f100)---IO-LED_SAFTY
PB14(stm32f100)---IO-LED_BLUE
PB15(stm32f100)---IO-LED_AMBER
PPM接收
PA8(stm32f100)---PPM_INPUT
S.BUS
PB4(stm32f100)---SBUS_OUTPUT_EN
PB10(stm32f100)---SBUS_OUTPUT
PB11(stm32f100)---SBUS_INPUT
JTAG
电源IO-VDD_3V3
PA13(stm32f100)---IO-SWDIO
PA14(stm32f100)---IO-SWCLK
PB3(stm32f100)---IO-SWO
卫星接收机
PA10(stm32f100)---IO-USART1_RX
PB15(stm32f100)---IO-LED_AMBER
PA10(stm32f100)--- VDD_3V3_SPEKTRUM 电源