文章目录
- 前言
- elf结构简介
- load_bpf_file函数
- 准备工作
- 创建map
- 处理所有的重定向section
- 加载ebpf程序
- 参考
前言
我们知道,使用clang/llvm编译生成的target为bpf的elf文件,使用load_bpf_file函数加载进入内核。
所以,这里,我们需要分析下load_bpf_file函数。
elf结构简介
我们首先需要一个bpf程序,并编译该程序。linux的sample提供了一个这样的示例代码:xdp_monitor_kern.c
我们需要linux的源码,有两种方式:ubuntu获取源码方式 | linux内核实验环境搭建
进入到源码目录之后,我们编译sample/bpf中的代码。
# O指定的是我之前编译好的内核位置。
# 看下sample/bpf/makefile文件,里面没有设置prefix这类变量。所以生成的二进制文件,在源码所在的目录
make -C samples/bpf/ O=../linux_image/5.6_debug# 查看编译生成的elf文件
➜ file xdp_monitor_kern.o
xdp_monitor_kern.o: ELF 64-bit LSB relocatable, eBPF, version 1 (SYSV), with debug_info, not stripped# 不用之后,记得删除编译生成的文件
make clean -C samples/bpf/ O=../linux_image/5.6_debug
之后,我们可以使用readelf查看xdp_monitor_kern.o的相关信息。
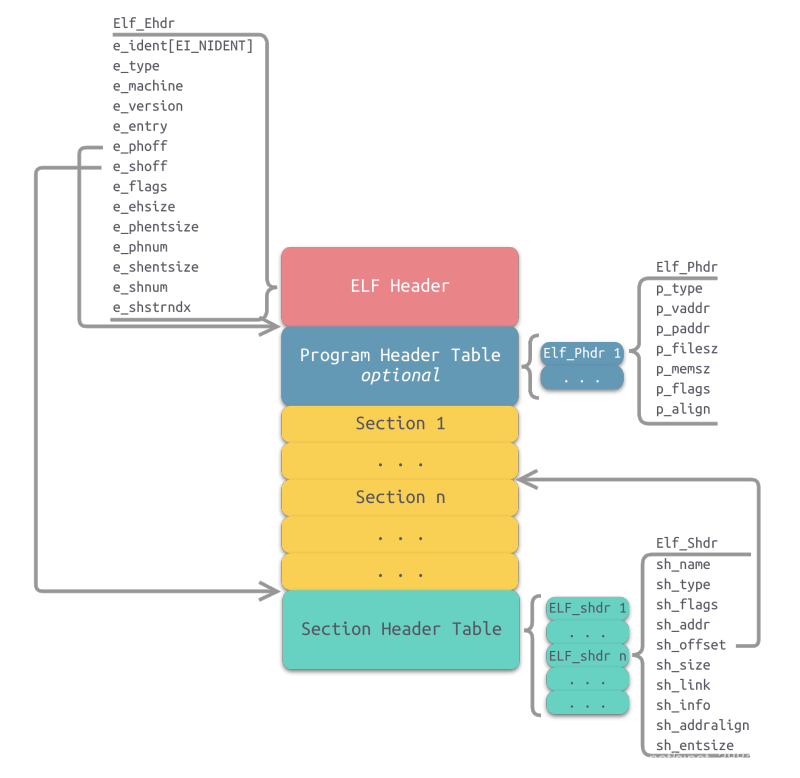
关于elf的结构,可以参考:《程序员的自我修养 – 链接装载与库》 第3章 目标文件里有什么。
图片来源: 计算机那些事(4)——ELF文件结构
另外,需要安装下elf库。
sudo apt install libelf-dev
load_bpf_file函数
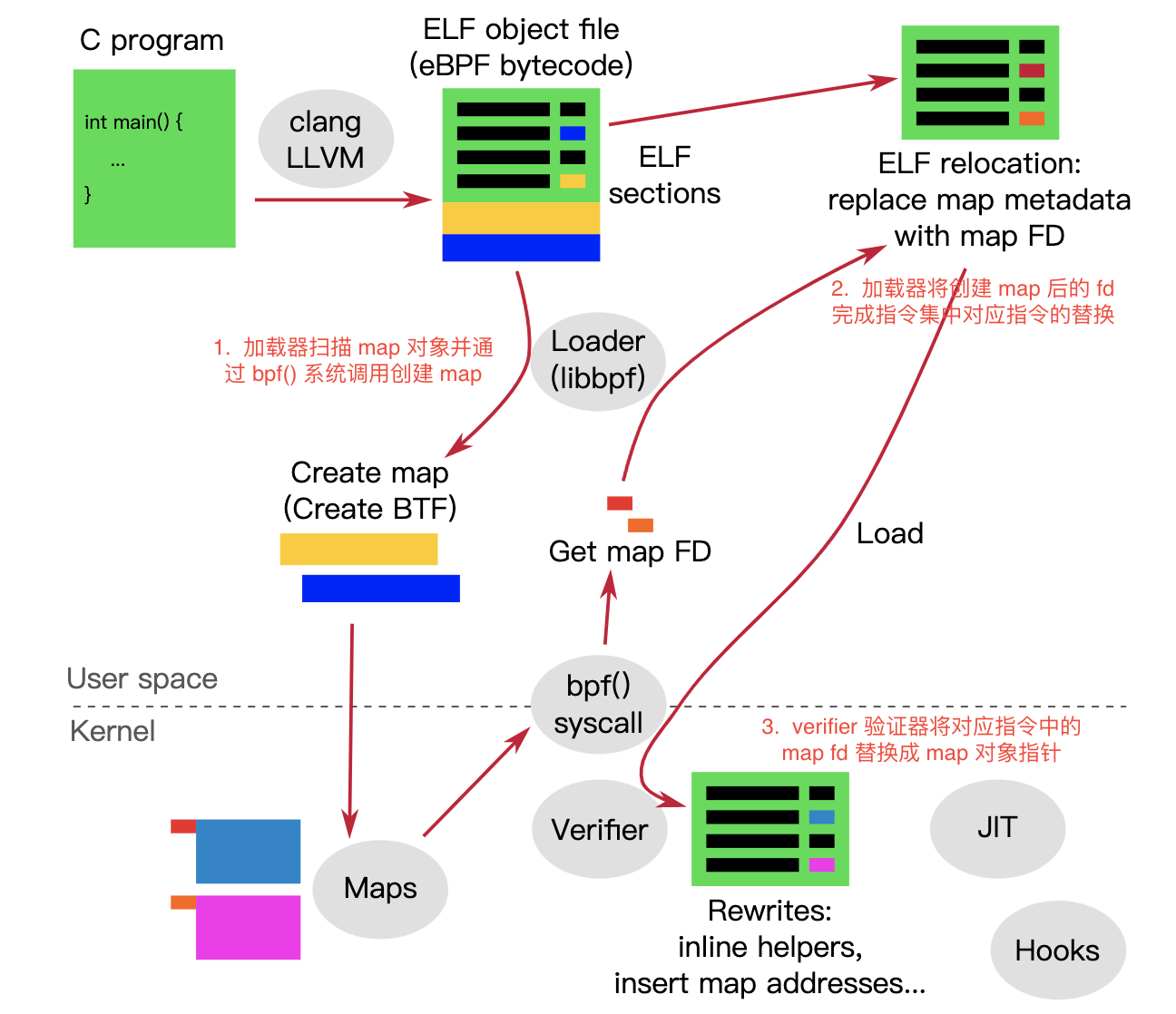
可以看到load_bpf_file函数,调用do_load_bpf_file函数。根据bpf_load.h里面的注释,我们知道这个函数,分为三个部分。
/* parses elf file compiled by llvm .c->.o* . parses 'maps' section and creates maps via BPF syscall* . parses 'license' section and passes it to syscall* . parses elf relocations for BPF maps and adjusts BPF_LD_IMM64 insns by* storing map_fd into insn->imm and marking such insns as BPF_PSEUDO_MAP_FD* . loads eBPF programs via BPF syscall** One ELF file can contain multiple BPF programs which will be loaded* and their FDs stored stored in prog_fd array** returns zero on success*/
int load_bpf_file(char *path);
int load_bpf_file_fixup_map(const char *path, fixup_map_cb fixup_map); //我们暂时不使用fixup_map,即fixup_map为NULL
- 解析map section,并通过bpf系统调用创建map
- 解析elf relocation sections。将其作用的重定向段中的insn的imm存储着map的fd,并将该insn标记为BPF_PSEUDO_MAP_FD。
- 通过bpf系统调用,加载eBPF程序
准备工作
打开elf文件。
if (elf_version(EV_CURRENT) == EV_NONE) //elf的version要为1return 1;fd = open(path, O_RDONLY, 0);if (fd < 0)return 1;elf = elf_begin(fd, ELF_C_READ, NULL); // elf指向elf文件if (!elf)return 1;if (gelf_getehdr(elf, &ehdr) != &ehdr) // 获取elf的headerreturn 1;/* clear all kprobes */i = write_kprobe_events(""); // 将/sys/kernel/debug/tracing/kprobe_events中的内容清空
扫描所有的section。
将license的相关内容从license section中取出;将kernel version的相关内容从version section中取出;
所有的map在一个map section中。保存map的数据和map section对应的section标号。
保存符号表的数据。段的类型是符号表时, sh_link的内容“操作系统相关”,(我不知道里面存储的是什么)它用于后面取map的名称。
/* scan over all elf sections to get license and map info */for (i = 1; i < ehdr.e_shnum; i++) {if (get_sec(elf, i, &ehdr, &shname, &shdr, &data))continue;if (0) /* helpful for llvm debugging */printf("section %d:%s data %p size %zd link %d flags %d\n",i, shname, data->d_buf, data->d_size,shdr.sh_link, (int) shdr.sh_flags);if (strcmp(shname, "license") == 0) {processed_sec[i] = true;memcpy(license, data->d_buf, data->d_size);} else if (strcmp(shname, "version") == 0) {processed_sec[i] = true;if (data->d_size != sizeof(int)) {printf("invalid size of version section %zd\n",data->d_size);return 1;}memcpy(&kern_version, data->d_buf, sizeof(int));} else if (strcmp(shname, "maps") == 0) {int j;maps_shndx = i;data_maps = data;for (j = 0; j < MAX_MAPS; j++)map_data[j].fd = -1;} else if (shdr.sh_type == SHT_SYMTAB) {strtabidx = shdr.sh_link;symbols = data;}}创建map
解析map section,并通过bpf系统调用创建map。
if (data_maps) {// 使用elf中的map section,填充map_data.nr_maps = load_elf_maps_section(map_data, maps_shndx,elf, symbols, strtabidx);if (nr_maps < 0) {printf("Error: Failed loading ELF maps (errno:%d):%s\n",nr_maps, strerror(-nr_maps));goto done;}/* 使用系统调用syscall(__NR_bpf, 0, attr, size);,创建各个map *//* 此时用户空间可以使用两个全局变量:map_fd,map_data来定位创建的map。 *//* 全局变量map_data_count,记录着该程序,创建的map数量 */if (load_maps(map_data, nr_maps, fixup_map))goto done;map_data_count = nr_maps;processed_sec[maps_shndx] = true;}
load_elf_maps_section是一个很漂亮的函数。它使用elf中的map section,填充map_data。
static int load_elf_maps_section(struct bpf_map_data *maps, int maps_shndx,Elf *elf, Elf_Data *symbols, int strtabidx)
{int map_sz_elf, map_sz_copy;bool validate_zero = false;Elf_Data *data_maps;int i, nr_maps;GElf_Sym *sym;Elf_Scn *scn;int copy_sz;if (maps_shndx < 0)return -EINVAL;if (!symbols)return -EINVAL;/* Get data for maps section via elf index */scn = elf_getscn(elf, maps_shndx);if (scn)data_maps = elf_getdata(scn, NULL);if (!scn || !data_maps) {printf("Failed to get Elf_Data from maps section %d\n",maps_shndx);return -EINVAL;}/* For each map get corrosponding symbol table entry *//* 符号表中包含map的符号和其他符号;根据指向的节是不是map的节,判断当前符号,是不是一个map的符号。所有的map在一个节中 *//* 最后map节中,每个map对应的符号在sym中 */sym = calloc(MAX_MAPS+1, sizeof(GElf_Sym));for (i = 0, nr_maps = 0; i < symbols->d_size / sizeof(GElf_Sym); i++) {assert(nr_maps < MAX_MAPS+1);if (!gelf_getsym(symbols, i, &sym[nr_maps]))continue;if (sym[nr_maps].st_shndx != maps_shndx)continue;/* Only increment iif maps section */nr_maps++;}/* Align to map_fd[] order, via sort on offset in sym.st_value *//* 根据它们的偏移量进行排序。 */qsort(sym, nr_maps, sizeof(GElf_Sym), cmp_symbols);/* Keeping compatible with ELF maps section changes* ------------------------------------------------* The program size of struct bpf_load_map_def is known by loader* code, but struct stored in ELF file can be different.** Unfortunately sym[i].st_size is zero. To calculate the* struct size stored in the ELF file, assume all struct have* the same size, and simply divide with number of map* symbols.* * map节中存放着多个map。它们的大小通过对应的符号无法看出。* 如果添加了新的特征,导致无法将elf中的map填充到程序中,则报错EFBIG* 比如,将来使用map添加了新的特征。但是这个程序却被使用在低版本上,导致map无法完全加载,可以EFBIG,* 这个程序,漂亮。*/map_sz_elf = data_maps->d_size / nr_maps;map_sz_copy = sizeof(struct bpf_load_map_def);if (map_sz_elf < map_sz_copy) {/** Backward compat, loading older ELF file with* smaller struct, keeping remaining bytes zero.*/map_sz_copy = map_sz_elf;} else if (map_sz_elf > map_sz_copy) {/** Forward compat, loading newer ELF file with larger* struct with unknown features. Assume zero means* feature not used. Thus, validate rest of struct* data is zero.*/validate_zero = true;}/* Memcpy relevant part of ELF maps data to loader maps */for (i = 0; i < nr_maps; i++) {struct bpf_load_map_def *def;unsigned char *addr, *end;const char *map_name;size_t offset;map_name = elf_strptr(elf, strtabidx, sym[i].st_name);maps[i].name = strdup(map_name);if (!maps[i].name) {printf("strdup(%s): %s(%d)\n", map_name,strerror(errno), errno);free(sym);return -errno;}/* Symbol value is offset into ELF maps section data area */offset = sym[i].st_value;def = (struct bpf_load_map_def *)(data_maps->d_buf + offset);maps[i].elf_offset = offset;memset(&maps[i].def, 0, sizeof(struct bpf_load_map_def));memcpy(&maps[i].def, def, map_sz_copy);/* Verify no newer features were requested */if (validate_zero) {addr = (unsigned char *) def + map_sz_copy;end = (unsigned char *) def + map_sz_elf;for (; addr < end; addr++) {if (*addr != 0) {free(sym);return -EFBIG;}}}}free(sym);return nr_maps;
}处理所有的重定向section
解析elf relocation sections。将其作用的重定向段中的insn的imm存储着map的fd,并将该insn标记为BPF_PSEUDO_MAP_FD。
/* process all relo sections, and rewrite bpf insns for maps */for (i = 1; i < ehdr.e_shnum; i++) {if (processed_sec[i])continue;if (get_sec(elf, i, &ehdr, &shname, &shdr, &data))continue;if (shdr.sh_type == SHT_REL) {struct bpf_insn *insns;/* locate prog sec that need map fixup (relocations) *//* 上面通过i遍历出所有的重定位表。sh_info该重定位表所作用的节在节头表中的下标 */if (get_sec(elf, shdr.sh_info, &ehdr, &shname_prog,&shdr_prog, &data_prog))continue;/* 要求通过重定位表找到的代码,需要是程序类型,并且该节在进程空间中可被执行 */if (shdr_prog.sh_type != SHT_PROGBITS ||!(shdr_prog.sh_flags & SHF_EXECINSTR))continue;insns = (struct bpf_insn *) data_prog->d_buf;processed_sec[i] = true; /* relo section *//* 对于重定位的代码,标记为BPF_PSEUDO_MAP_FD;insn中的imm指向map的fd*/if (parse_relo_and_apply(data, symbols, &shdr, insns,map_data, nr_maps))continue;}}
加载ebpf程序
通过bpf系统调用,加载eBPF程序。
/* load programs *//* 不需要加载的section:version,license,map,relo section*/for (i = 1; i < ehdr.e_shnum; i++) {if (processed_sec[i])continue;if (get_sec(elf, i, &ehdr, &shname, &shdr, &data))continue;if (memcmp(shname, "kprobe/", 7) == 0 ||memcmp(shname, "kretprobe/", 10) == 0 ||memcmp(shname, "tracepoint/", 11) == 0 ||memcmp(shname, "raw_tracepoint/", 15) == 0 ||memcmp(shname, "xdp", 3) == 0 ||memcmp(shname, "perf_event", 10) == 0 ||memcmp(shname, "socket", 6) == 0 ||memcmp(shname, "cgroup/", 7) == 0 ||memcmp(shname, "sockops", 7) == 0 ||memcmp(shname, "sk_skb", 6) == 0 ||memcmp(shname, "sk_msg", 6) == 0) {ret = load_and_attach(shname, data->d_buf,data->d_size);if (ret != 0)goto done;}}
以SEC("tracepoint/xdp/xdp_redirect")为例,我们看下加载过程。
.../* 最后调用sys_bpf(BPF_PROG_LOAD, attr, size);系统调用,将程序加载进入*/fd = bpf_load_program(prog_type, prog, insns_cnt, license, kern_version,bpf_log_buf, BPF_LOG_BUF_SIZE);
...} else if (is_tracepoint) {event += 11;if (*event == 0) {printf("event name cannot be empty\n");return -1;}strcpy(buf, DEBUGFS);strcat(buf, "events/");strcat(buf, event);strcat(buf, "/id");}
...接下来,从/sys/kernel/debug/tracing/events/xdp/xdp_redirect/id中读取内容
...我不知道为什么需要下面这样做。efd = sys_perf_event_open(&attr, -1/*pid*/, 0/*cpu*/, -1/*group_fd*/, 0);...err = ioctl(efd, PERF_EVENT_IOC_ENABLE, 0);...err = ioctl(efd, PERF_EVENT_IOC_SET_BPF, fd);
参考
eBPF 程序装载、翻译与运行过程详解