自动控制理论根轨迹的学习过程中,经常会遇到几个问题:
- 为什么要用根轨迹法?
- 为什么根轨迹法最终转化为调整增益K来反应系统的稳定性和动态性能?
- 为什么根轨迹法用开环传递函数求解的却是闭环极点?
盲目的借助于matlab进行根轨迹的计算和绘图,有时候往往不得其深意,可以从基础的定义去梳理我们为什要用根轨迹法,以及根轨迹能解决什么问题。只有明白了根轨迹的目的,我们才能将根轨迹法作为一种工具,真正做到为我们所用。闲话少叙,开始正题。
目录
- 根轨迹的定义
- 幅值条件和相角条件
- 根轨迹的绘制
- 参考文献
根轨迹的定义
自动控制系统的稳定性取决于特征根的值(闭环极点),系统的品质取决于闭环系统的极点和零点,如果系统具有可变的增益,那么闭环极点的位置将取决于环路增益K的选取,即可通过简单的增益调整将闭环极点移动到所需位置,那么设计的目的将转化为选择合适增益值的问题。当环路增益K变化时,闭环极点在S平面内的移动,即为根轨迹。
控制系统的闭环极点就是特征方程的根,求解高次特征方程的根是较为繁琐的,当增益K变化时,特征根也在变化,因此,直接求解闭环特征方程根进行控制系统的计算过于繁琐。1948年Evans根据反馈系统开环和闭环传递函数间的关系,提出一种由开环传递函数直接寻求闭环极点,而无需求解高阶系统特征根的方法,即根轨迹法。
所谓根轨迹,指系统的某个特定的参数,在特定范围内变化时,闭环极点在S平面内的运动轨迹。分为常规根轨迹和广义根轨迹法,常规根轨迹的参数变量为增益K,广义根轨迹参数变量为时间常数,反馈系数和开环零极点等。
幅值条件和相角条件
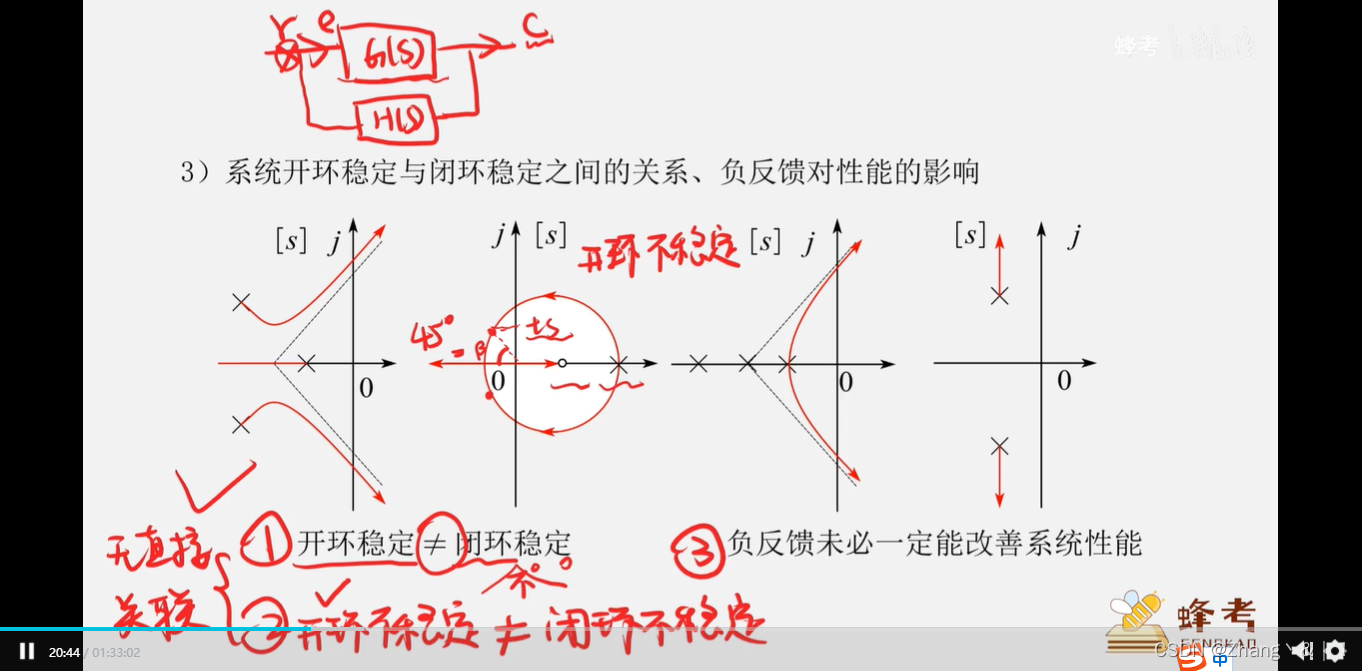
假设控制系统,G为开环传递函数,H为负反馈传递函数,表示为:

则闭环传递函数为:

这里就可以解决我们对问题3的疑惑,即闭环传递函数的零点分别为G(s)的零点H(s)的极点。接下来看闭环传递函数极点的求解。

由式4可以看出D(s)为一个高阶代数方程,对其求根很不方便,甚至没有解析解,而且很难看出闭环极点和参数间的关系。接下来我们采用根轨迹法,把其等价为根轨迹方程:
这下对于问题3闭环极点的求解,已经完全转化为了对于D(s)和根轨迹方程根轨迹的求解问题啦。让我们从新审视下根轨迹的定义,即系统的某个特定的参数,在特定范围内变化时,闭环极点在S平面内的运动轨迹。这下关于根轨迹的几个疑问就解决了。
接下来求解闭环极点问题,则闭环传递函数的闭环极点须同时满足幅值和相角条件,由式6和7可知,幅值条件为一个与K相关的函数,相角条件与K值无关,即满足相角条件的s,总能找到一个与之对应的满足幅值条件的K值,即根轨迹由相角条件确定。

根轨迹的绘制
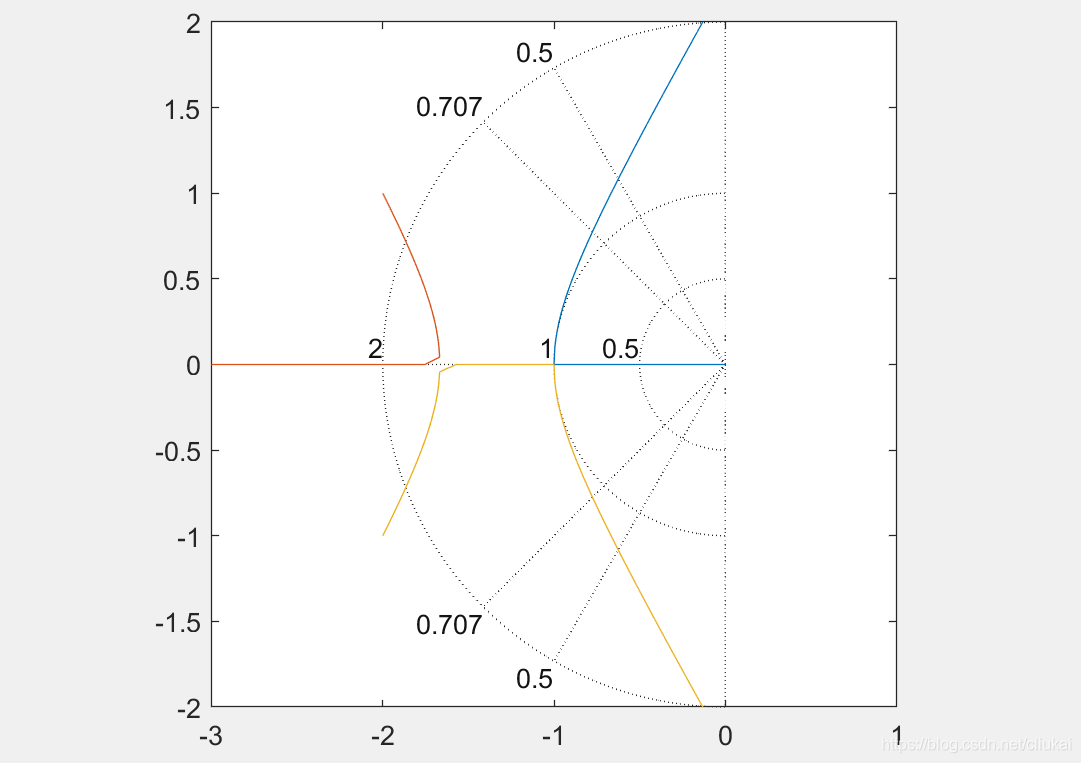
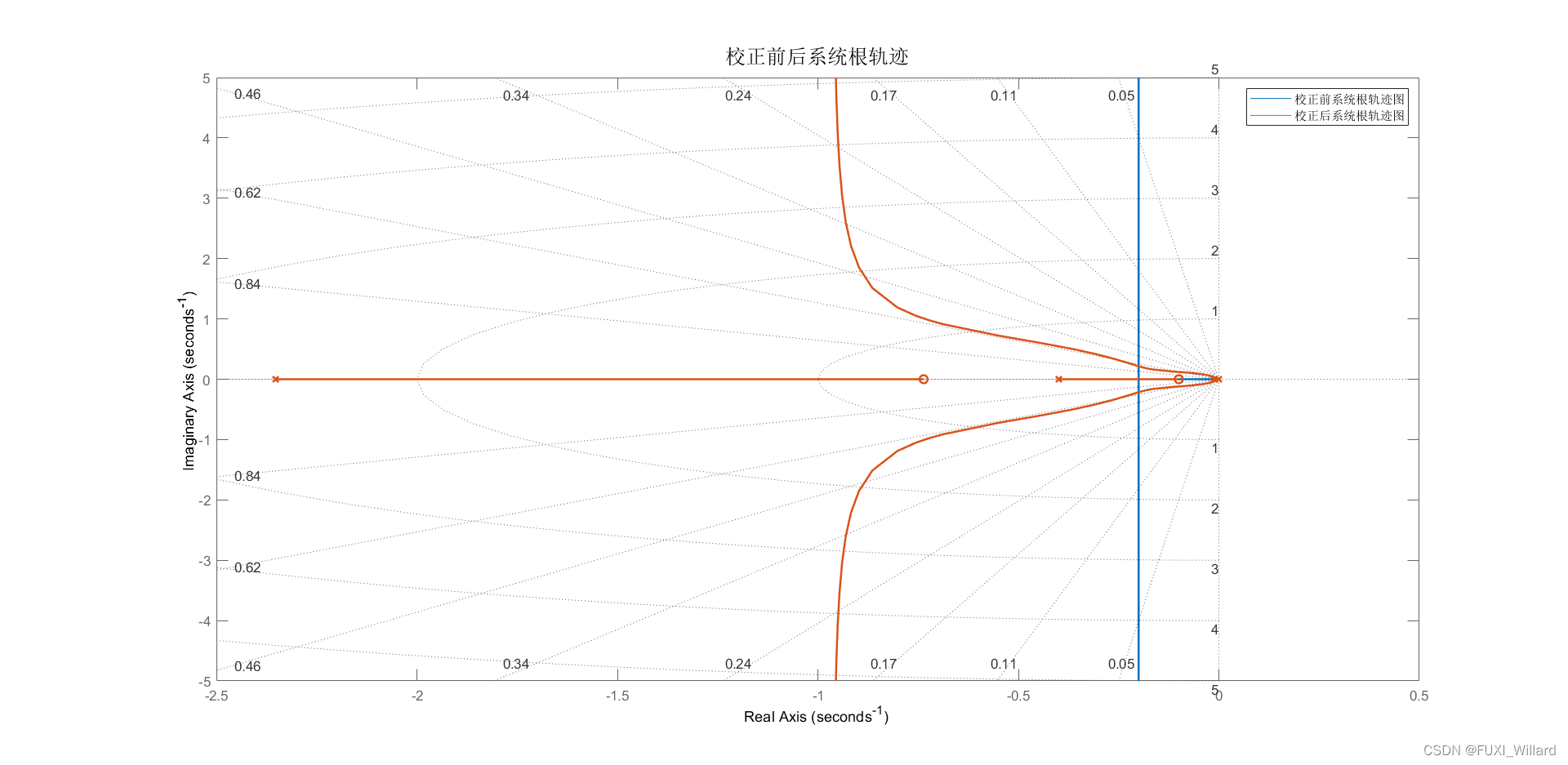
接下来继续讨论根轨迹的绘制法则,参照根轨迹绘制的8大法则,可以绘制出满足需求的根轨迹曲线,借助于matlab工具对根轨迹的分析,工程人员已经无需将精力放在根轨迹的绘制工作上,从而把重点放在对于根轨迹的分析和理解上。
法则1:根轨迹的分支数,连续性和对称性。
对与确定的系统,根轨迹分支数等于开环极点数,根轨迹是一簇连续的曲线,又因为特征方程的根是实根或者是共轭复根,所以根轨迹关于实轴对称。
法则2:根轨迹的起点和终点。
根轨迹的起点为开环极点,终止于开环零点或无穷远处。
法则3:实轴上的根轨迹。
实轴开环零极点数之和为奇数,则实轴段为根轨迹的一部分。
法则4:根轨迹的渐近线。
法则5:根轨迹的分离点和汇合点。
法则6:根轨迹的起始角和终止角。
法则7:根轨迹与虚轴的交点。
法则8:根轨迹任一点对应的增益K。
借助于matlab绘制的根轨迹曲线,无须进行复杂的计算,即可求得法则4-8相关的参数,从而将重点放在对于根轨迹图的理解上。
参考文献
《自动控制理论》第三版. 邹伯敏主编。