根轨迹法:随着低频环路增益 的变化,追踪闭环传递函数的极点和零点在复平面上的变化趋势。
的变化,追踪闭环传递函数的极点和零点在复平面上的变化趋势。

其中相角条件是决定根轨迹的充要条件,s平面上一点若满足相角条件,则一定在根轨迹上,幅值条件为必要条件。
再通过幅值方程求出K值,K即为1+betaH中betaH的低频增益。
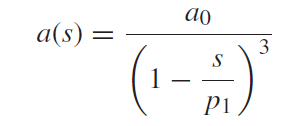
假设一个三重极点的放大器开环函数为:
接成闭环后:
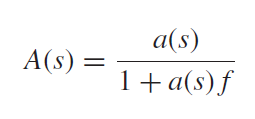
将1式代入得到:
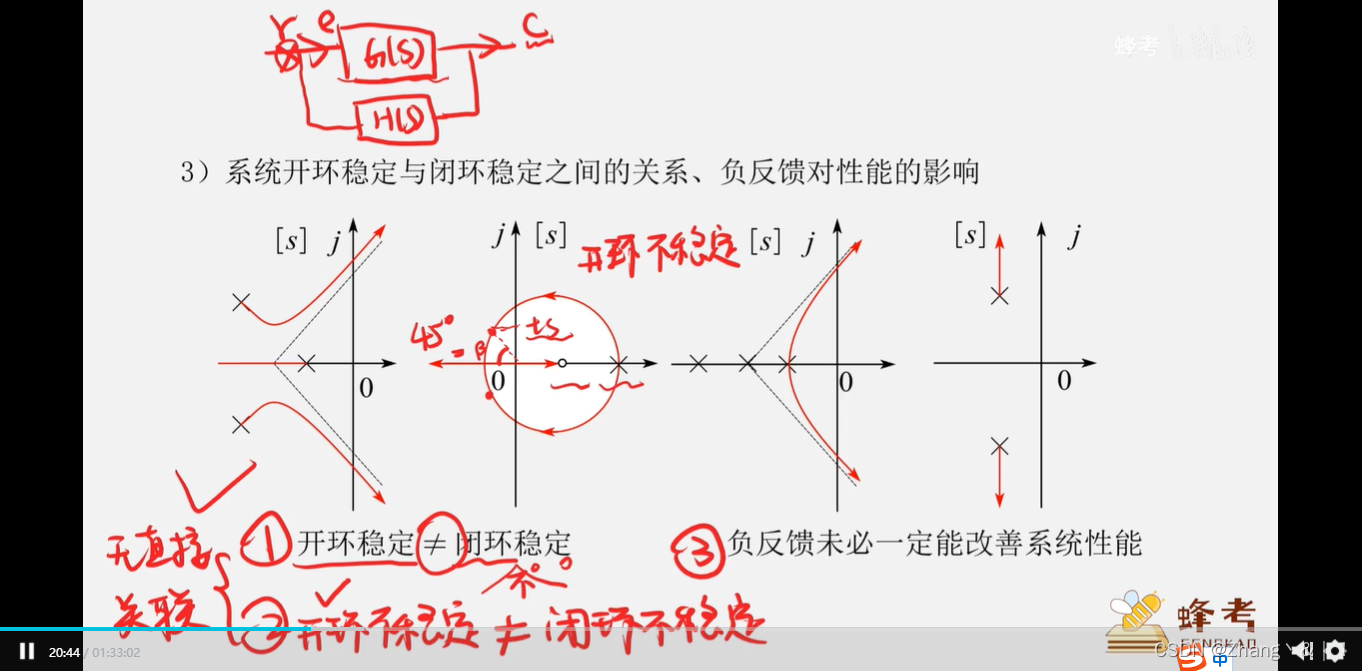
如果闭环系统的极点都位于左半平面,系统是稳定的,否则系统是不稳定的,可以在根轨迹穿过jw轴时候求出临界的增益
假设开环P1=1e9 rad/s,接成单位增益反馈,则闭环分母中f=1,a0f=a0,在matlab中画出根轨迹。G为开环传递函数,等效可以看做是plot的闭环极点与开环低频增益a0的关系。
G=tf(1,[conv(conv([1e-9,1],[1e-9,1]),[1e-9,1])])
rlocus(G);
axis([-2e9 1e9 -2e9 2e9])
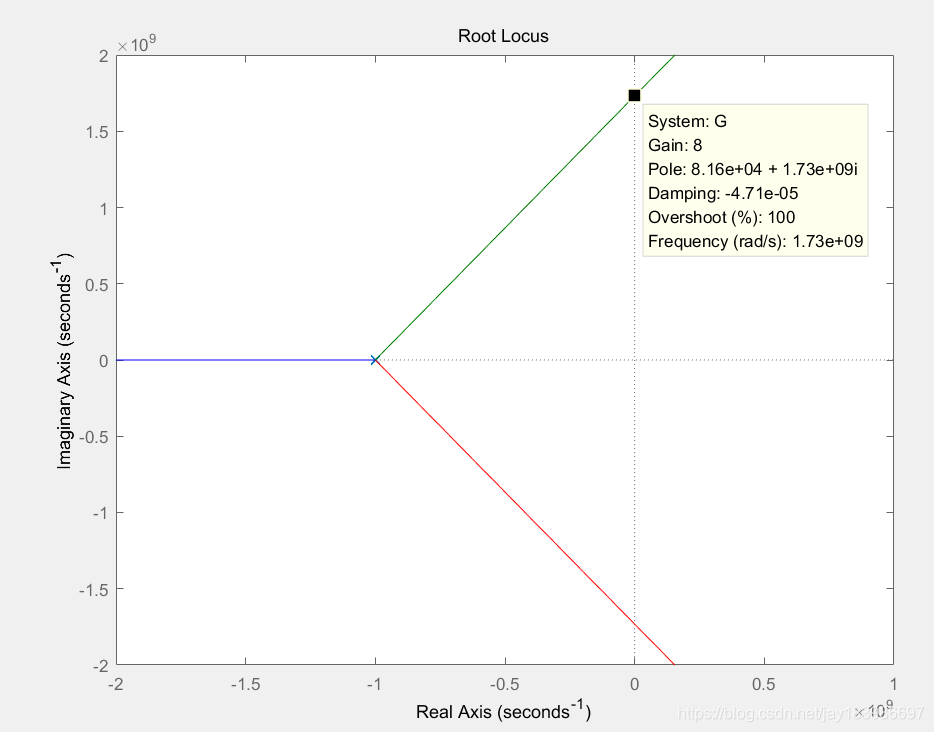
可以看到当环路增益a0f即a0等于8时候,极点开始离开左平面,也说明要想起振,三级环形振荡器中每级的低频增益要大于2,随着震荡开始,信号通路上各级电路发生非线性,最终使得平均的环路增益还是等于1。
同样,与nyquist稳定性判据对应,我们可以画出A0=8时候的nyquist图:
G=tf(8,[conv(conv([1e-9,1],[1e-9,1]),[1e-9,1])])
nyquist(G)
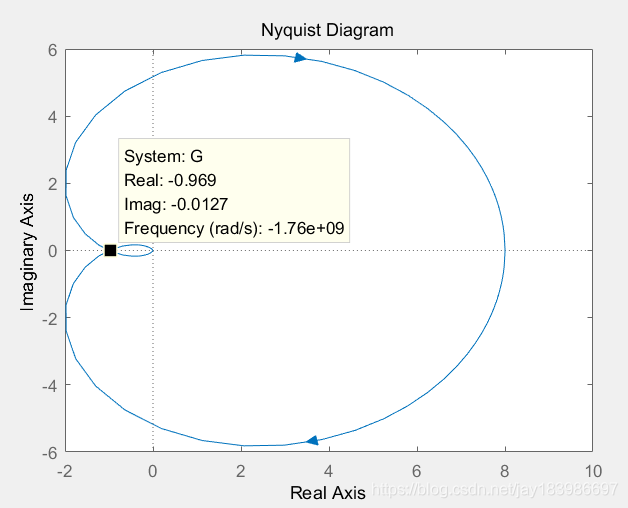
可以看到当a0=8时候,奈奎斯特图正好穿过-1,0点,并且顺时针两次,因此有两个极点在虚轴上面。
同时也可以plot出时域阶跃响应与a0值的对应关系:
Y=[];
for K=[1:1:6]
GK=feedback(K*G,1);
step(GK);
hold on;
end
hold off;