文章目录
- 1 根轨迹法基础知识
- 什么是根轨迹
- 根轨迹有什么用
- 什么是根轨迹法
- 2 根轨迹图
- 幅值和幅角条件
- 手绘根轨迹图
- 经验和特性
- 3 用MATLAB绘制根轨迹
- 画一个简单的根轨迹图
- 指定K的取值范围绘制根轨迹
- 绘制极网格
- 根轨迹法的分析
- 条件稳定系统
- 非最小相位系统
- 求任意根轨迹点上的增益K值
1 根轨迹法基础知识
什么是根轨迹
随着开环增益K的改变,闭环极点也将发生改变,从而在平面上产生一系列的点,这些点的轨迹,就叫做根轨迹。
根轨迹有什么用
闭环系统瞬态响应的基本特性和闭环极点位置密切相关。
在设计中,常常利用增益调整,将闭环极点移动到需要的位置上。
什么是根轨迹法
根轨迹法是一种图解法,由W.R.伊凡斯(Evans)提出,图像反应了特征方程的根和系统中某一个参数数值关系的方法。通常这个参数取开环增益,并命令这个参数在0到无穷大之间进行变化。
2 根轨迹图
幅值和幅角条件

构造系统的闭环传递函数,得到闭环系统的特征方程(即分母为0),然后分解成幅度值和幅度角两个方程。
{ K G ( s ) H ( s ) } = ± 18 0 ∘ ( 2 k + 1 ) \{KG(s) H(s)\}=\pm 180^{\circ}(2 k+1) {KG(s)H(s)}=±180∘(2k+1)
∣ K G ( s ) H ( s ) ∣ = 1 |\mathrm{KG}(\mathrm{s}) \mathrm{H}(\mathrm{s})|=1 ∣KG(s)H(s)∣=1
满足这两个方程的s值,就是特征方程的根,就是闭环极点。
只满足幅角条件的点构成的图形就是根轨迹(同时满足满足幅值条件就变成了特定的点)。
手绘根轨迹图
根轨迹的几个性质:
- K=0对应的特征方程根,就是根轨迹的起点。
- 根轨迹的数量,就是特征方程的阶数,也就是s的最高次数。
具体步骤
- 确定实轴上的根轨迹。(尝试把试验点放在实轴上)
- 确定根轨迹的渐近线。(尝试将s设定为无穷大)
- 确定分离点。分离点就是s平面上特征方程有重根的点,随着K的增大,根轨迹点将脱离实轴,向复平面运动。
- 确定根轨迹和虚轴的交点。(利用劳斯稳定判据)
如果极点是一对共轭复数根,则需要确定出射角和汇合点,出射角决定了根轨迹是向实轴运动,还是向复平面运动。
经验和特性
- 根轨迹分支起始于开环极点,终止于开环零点,分支数等于特征方程根的数目。
- 根轨迹在s平面中,上下对称,对称轴为实轴。
- 在根轨迹图上任取一点,可以求出K值。K值是s点到各极点距离乘积,与s到各零点距离的乘积的比值。
- 如果开环极点数目,比有限开环零点数目多3个或以上,必定存在一个K,当增益超过K时,根轨迹进入右半平面。
3 用MATLAB绘制根轨迹
基本命令是rlocus
rlocus(num,den)
rlocus(A,B,C,D)
使用符号画图可以先把计算结果保存起来,然后使用plot
r = rlocus(num, den)
plot(r, 'o')
plot(r, 'x')
设定绘图区域和长宽比
v = [-6 6 -6 6];
axis(v);
axis('square')
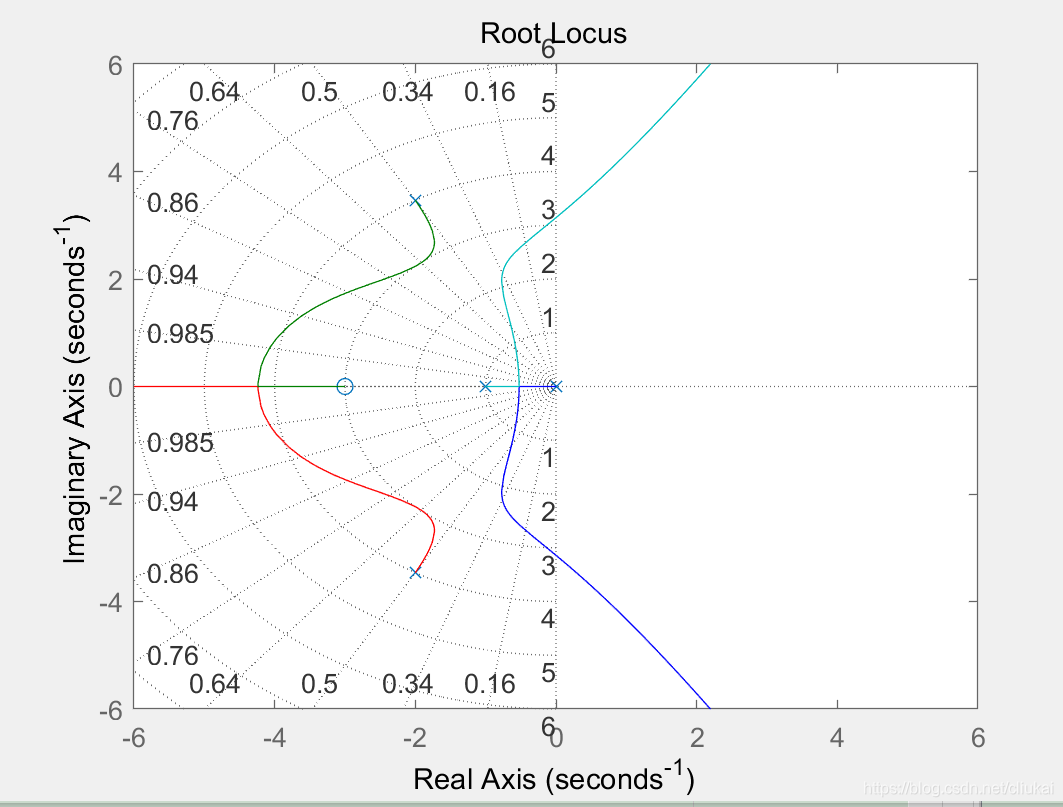
画一个简单的根轨迹图
a = [1 1 0];
b = [1 4 16];
c = conv(a,b);
den = c;
num = [1 3];
rlocus(num,den)
v = [-6 6 -6 6]; # 确定可视区间
axis(v);
axis('square'); # 拉伸成正方形
grid; # 画出网格
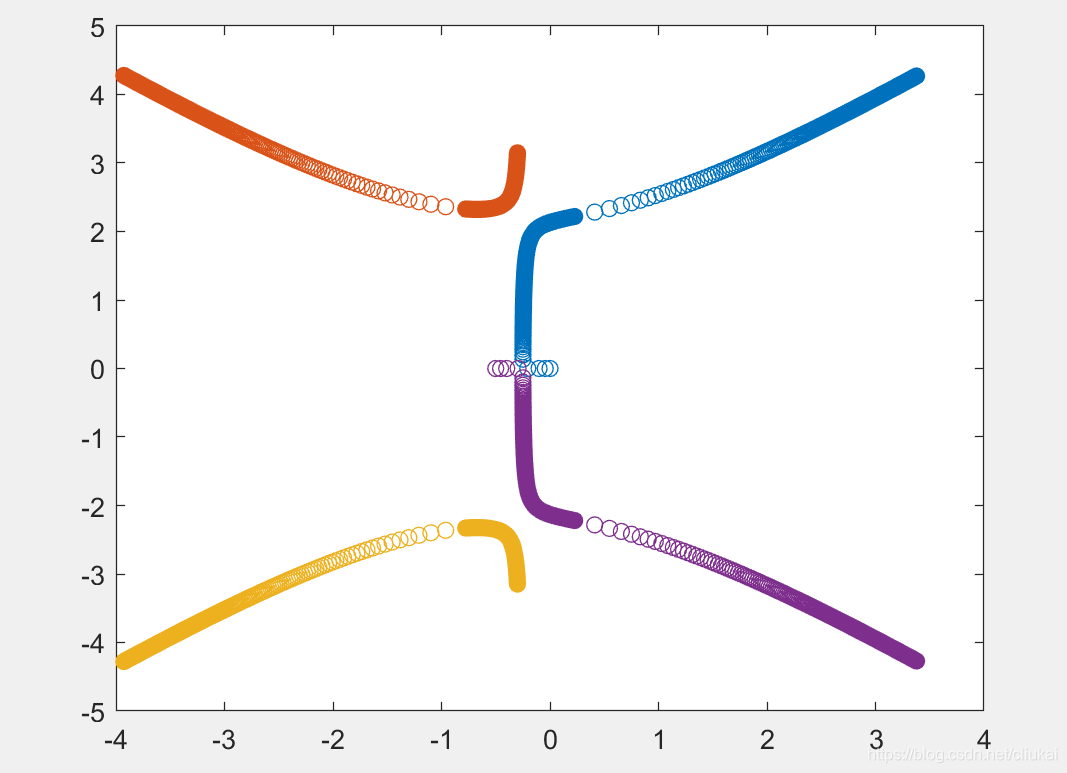
指定K的取值范围绘制根轨迹
num = [1];
den = [1 1.1 10.3 5 0];
K1 = 0 : 0.2 : 20;
K2 = 20 : 0.1 : 30;
K3 = 30: 5 : 1000;
K = [K1 K2 K3] # 对不同的区间,取不同的密度
r = rlocus(num, den, K);
plot(r, 'o')
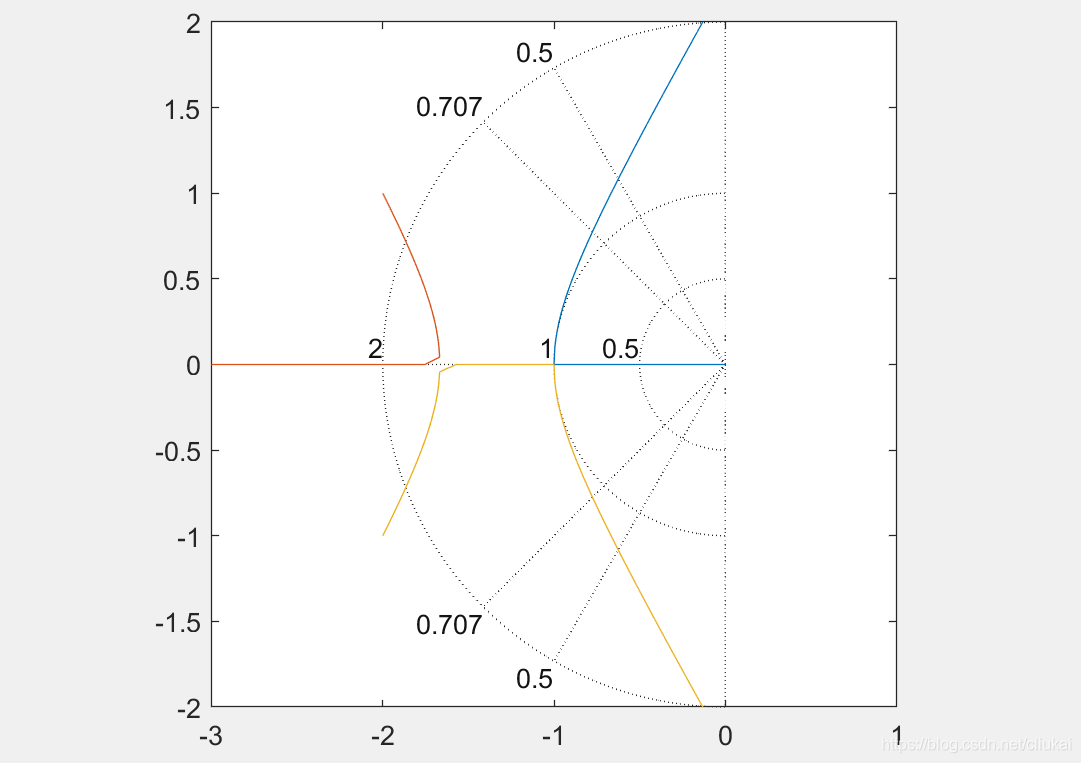
绘制极网格
sgrid命令可以把定常阻尼比和定常自然频率圆覆盖到根轨迹图上。
num = [1];
den = [1 4 5 0];
K = 0:0.01:1000;
r = rlocus(num,den,K);
plot(r,'-');
v = [-3 1 -2 2];
axis(v);
axis('square');
sgrid([0.5,0.707],[0.5,1,2]); # 分别是射线和半圆
根轨迹法的分析
条件稳定系统
什么是条件稳定系统?
如果系统仅在有限的K值范围内是稳定的,称为条件稳定系统。
如何消除条件稳定性?
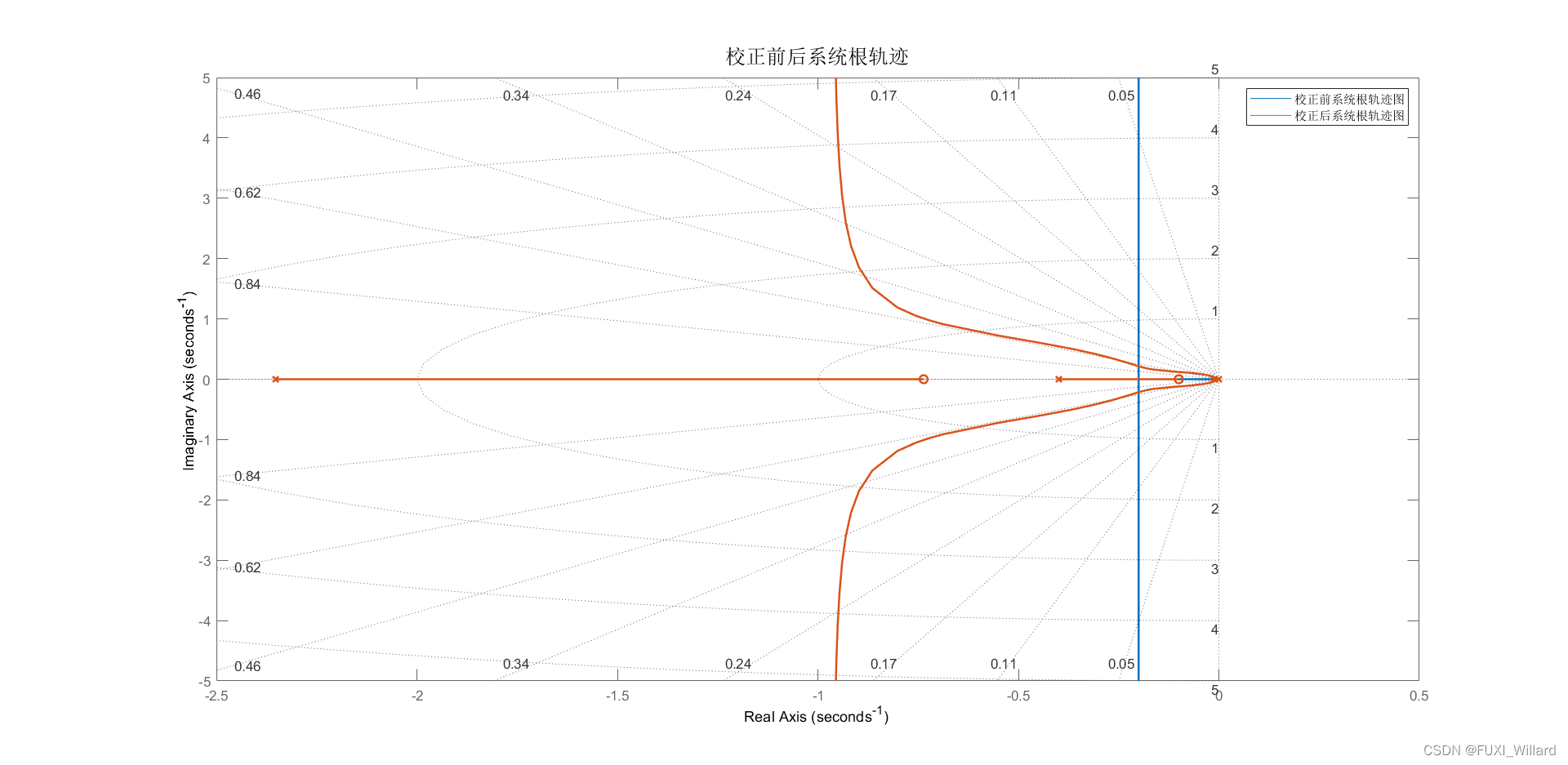
增加适当的校正网络,可以消除条件稳定性。例如增加一个零点,可以根轨迹向左边弯曲(因为根轨迹最终需要结束于0点)。
非最小相位系统
什么是最小相位系统?
如果系统的极点和零点都在左半平面,则称为最小相位系统。
如果至少有一个极点或者零点在s右半平面,就是非最小相位系统。
求任意根轨迹点上的增益K值
[K,r] = rlocfind(num,den)