一、稳定性能
根轨迹法的核心思路是:通过研究系统特征方程的根随着传递函数中某一参数从0到∞变化时而变化形成的轨线。
闭环系统稳定性的充分必要条件:系统所有特征根均具有负实部。 表现在根轨迹中,就是所有的根取值均不进入右半平面。
以上一篇博文【自动控制原理】根轨迹法之绘制根轨迹 中的例子: W ( s ) = K g ∗ ( s + 3 ) ( s + 1 ) ( s + 2 ) ( s 2 + s + 1.25 ) W(s)=\frac{K_{g}^{*}(s+3)}{(s+1)(s+2)(s^2+s+1.25)} W(s)=(s+1)(s+2)(s2+s+1.25)Kg∗(s+3)为例,我们已经画出其根轨迹为:

可以看出,随着 K g ∗ K^*_g Kg∗从 0 0 0变化到无穷时,有一对共轭复根从 ( − 0.5 ± j ) (-0.5\pm j) (−0.5±j)变化到无穷。可以看出,必然存在某一个 K g o ∗ K^*_{g_o} Kgo∗使得在此时,该共轭复根恰好运行到虚轴,此时系统位于临界处。
反之,如果根轨迹始终位于虚轴左侧,则系统不论参数如何变化,始终是稳定的。因此,通过根轨迹可以看出系统的稳定性能。
如果要求临界稳定的 K g ∗ K^*_g Kg∗值,则可以利用绘制法则7求解,如上例子中:
闭环特征方程 D ( s ) = s 4 + 4 s 3 + 6.25 s 2 + 5.75 s + 2.5 + K g ∗ s + 3 K g ∗ = 0 D(s)=s^4+4s^3+6.25s^2+5.75s+2.5+K_{g}^*s+3K_{g}^*=0 D(s)=s4+4s3+6.25s2+5.75s+2.5+Kg∗s+3Kg∗=0,令 s = j ω s=j\omega s=jω
得 D ( j ω ) = ω 4 − 4 ω 3 j − 6.25 ω 2 + 5.75 ω j + 2.5 + K g ∗ ω j + 3 K g ∗ = ( ω 4 − 6.25 ω 2 + 2.5 + 3 K g ∗ ) + ( K g ∗ ω + 5.75 ω − 4 ω 3 ) j = 0 D(j\omega)=\omega^4-4\omega^3j-6.25\omega^2+5.75\omega j+2.5+K_{g}^*\omega j+3K_{g}^*=(\omega^4-6.25\omega^2+2.5+3K_{g}^*)+(K_{g}^*\omega+5.75\omega-4\omega^3)j=0 D(jω)=ω4−4ω3j−6.25ω2+5.75ωj+2.5+Kg∗ωj+3Kg∗=(ω4−6.25ω2+2.5+3Kg∗)+(Kg∗ω+5.75ω−4ω3)j=0
所以 { ω 4 − 6.25 ω 2 + 2.5 + 3 K g ∗ = 0 K g ∗ ω + 5.75 ω − 4 ω 3 = 0 \left\{ \begin{array}{c} \omega^4-6.25\omega^2+2.5+3K_{g}^*=0 \\ K_{g}^*\omega+5.75\omega-4\omega^3=0 \\ \end{array} \right. {ω4−6.25ω2+2.5+3Kg∗=0Kg∗ω+5.75ω−4ω3=0解得 K g ∗ = 1.9398 或 − 36.44 ( 舍 ) , ω = 1.3865 K_{g}^*=1.9398或-36.44(舍),\omega=1.3865 Kg∗=1.9398或−36.44(舍),ω=1.3865
因此解得 K g ∗ ∈ ( 0 , 1.93 ) K^*_g\in (0,1.93) Kg∗∈(0,1.93)时,系统是稳定的,临界稳定时,这对共轭复根运行至 ± 1.3865 j \pm 1.3865j ±1.3865j处。
注:解得的 K g ∗ K^*_g Kg∗不可以取1.94,虽然这样取值满足四舍五入,但是系统稳定时, K g ∗ K^*_g Kg∗并不会超过 1.9398 1.9398 1.9398,所以应当向下取整。
二、系统参数设计
设计系统参数,即根据变化的根轨迹,求解满足要求的 K g ∗ K^*_g Kg∗:
S t e p 1 Step1 Step1:首先按照刚才所述求解出系统稳定的 K g ∗ K^*_g Kg∗范围,在该前提下,求解系统参数。
S t e p 2 Step2 Step2:通常根据阻尼角大小,绘制一条辅助线,求解与根轨迹的交点
S t e p 3 Step3 Step3:该点即是系统期望配置的特征根所在位置,求出该位置处的 K g ∗ K^*_g Kg∗即可。
三、偶极子对、主导极点、开环零点
3.1 偶极子对
偶极子对是指:一对零极点相距很近,又非常靠近原点,且极点位于零点右侧,称之为偶极子对
利用偶极子对,可以改善系统的稳态性能。如果不考虑稳态性能时,则可以在传递函数中将互为偶极子的因式对消,从而实现降阶。
3.2 主导极点
主导极点指:距离虚轴最近的极点,其实部小于其他极点的1/5,且周围不存在零点,称之为主导极点。
利用主导极点,可以认为系统性能较大程度取决于主导极点,从而实现降阶。
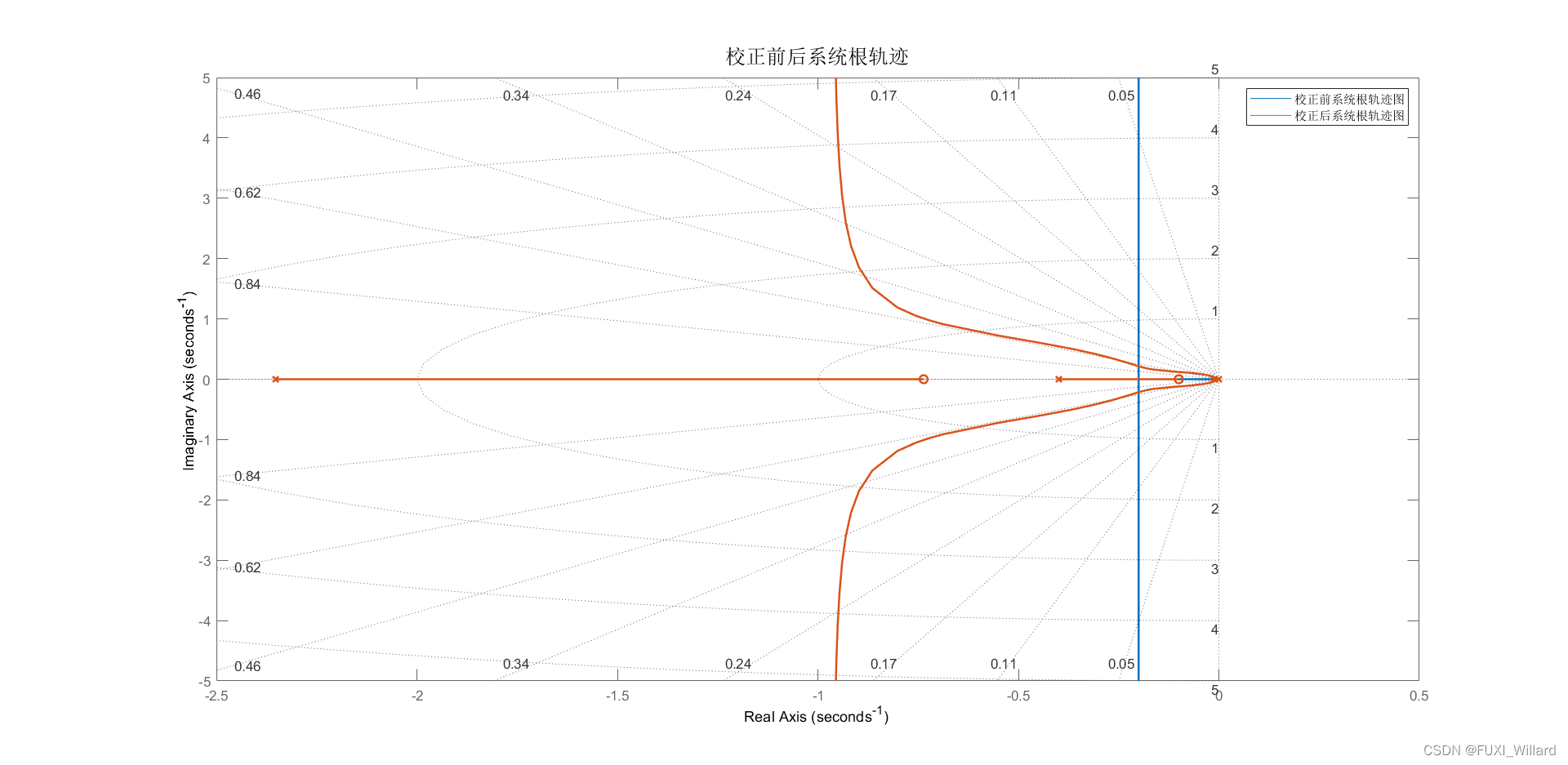
3.3 开环零点
增加开环零点,会使得根轨迹左偏,有利于提高系统的稳定性。如本文刚开始那个例子中,若要使得根轨迹不偏向于右半平面,可以考虑为系统增加零点。