拉格朗日动力学
- 动力学总公式
- 动能部分
- 势能部分
- M(q)部分
- c ( q , q ˙ ) c(q,\dot{q}) c(q,q˙)部分
- g(q)部分
- PR机械臂例题
- Matlab代码实现
- 相关资料
请务必先看此处!!!!!
本文没有理论分析,是直接开干!!!
公式部分详细介绍了公式及各参数及其由来
例题部分详细写了公式各部分的详细计算和使用
代码部分则是实现了例题部分的Matlab代码
相关资料部分写了主要的参考来源
本文最佳食用方式!
先快速浏览下公式部分都有什么东西,以确保后续要用时你能找到
直接去例题部分,跟着推导一边,需要用到啥公式再去公式部分查找,再详细看具体的公式解释
然后去看代码实现,你手推一遍之后就会很容易看懂公式,争取能自己写出来不同题目的代码
想进一步了解的,请看相关资料部分,老卢卡主页的Robotics里面的course material部分有PPT和历次的考试题
题是真的难的一匹。。。期中八成要挂了,跪地吐血
果然挂了,吐血
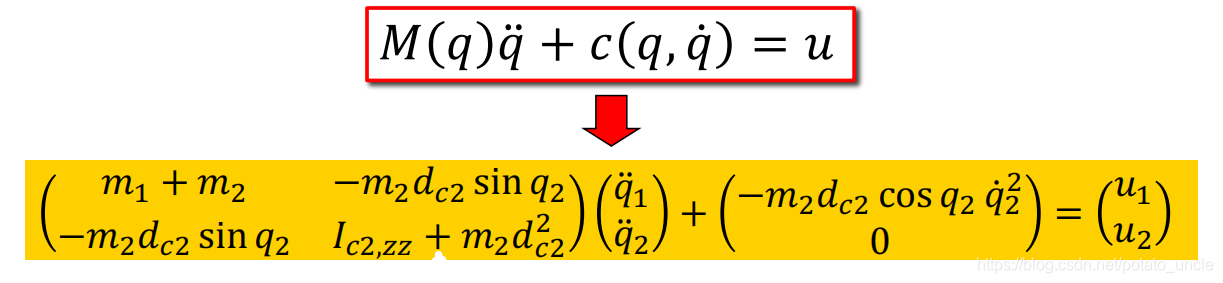
动力学总公式
中间的推导过程略过,感兴趣得朋友可以自行去查看资料
M ( q ) q ¨ + c ( q , q ˙ ) + g ( q ) = u (动力学总公式) M(q) \ddot{q} +c(q, \dot{q})+g(q)=u \tag{动力学总公式} M(q)q¨+c(q,q˙)+g(q)=u(动力学总公式)
-
M(q) 表示广义机器人的惯性矩阵,对称的,正定的, ∀ q ⇒ \forall q \Rightarrow ∀q⇒总是可逆的,求法请继续往下看
-
q ¨ = [ q ¨ c 1 . . . q ¨ c n ] \ddot{q}=\begin{bmatrix} \ddot{q}_{c1} \\ ... \\ \ddot{q}_{cn} \end{bmatrix} q¨=⎣⎡q¨c1...q¨cn⎦⎤ 表示连杆质心C的角加速度, q = [ q c 1 . . . q c n ] q=\begin{bmatrix} q_{c1} \\ ... \\ q_{cn} \end{bmatrix} q=⎣⎡qc1...qcn⎦⎤表示角度, c c c 表示连杆质心C
-
c ( q , q ˙ ) c(q, \dot{q}) c(q,q˙) 表示 Coriolis力的系数
-
g ( q ) g(q) g(q) 表示重力项
动能部分
第 i i i 个单个连杆的总动能公式:
T i = 1 2 m i v i T v i + 1 2 ω i T I c i ω i ( 1, K o ¨ nig定理 ) T_{i} = \frac{1}{2}m_{i} v_{i}^{T}v_{i}+\frac{1}{2} \omega_{i}^{T}I_{ci}\omega_{i} \tag{1, König定理} Ti=21miviTvi+21ωiTIciωi(1, Ko¨nig定理)
各部分参数详细解析:
-
v v v 表示连杆质心 C i C_{i} Ci 的线速度
-
ω \omega ω 表示连杆质心 C i C_{i} Ci的角速度
-
I c i = [ I c i , x x I c i , y y I c i , z z ] I_{ci} = \begin{bmatrix} I_{ci,xx}& & \\ & I_{ci,yy}& \\ & & I_{ci,zz} \end{bmatrix} Ici=⎣⎡Ici,xxIci,yyIci,zz⎦⎤
势能部分
第 i i i 个单个连杆的总势能公式:
U = − m i g 0 d i U = - m_{i} g_{0} d_{i} U=−mig0di
-
m i m_{i} mi表示连杆质量
-
g 0 g_{0} g0表示重力加速度,一般为 9.81 m / s 2 9.81m/s^{2} 9.81m/s2
-
d i d_{i} di表示初始连接点到连杆质心C的 d c i d_{ci} dci 在 g 0 g_{0} g0 方向的分量,一般 d i = d c i c o s ( θ ) d_{i} = d_{ci}cos(\theta) di=dcicos(θ)
M(q)部分
整个机器人的总动能为:
T = T 1 + . . . + T n (2) T = T_{1}+ ... +T_{n} \tag{2} T=T1+...+Tn(2)
另有:
T = 1 2 q ˙ T M ( q ) q ˙ (3) T = \frac{1}{2} \dot{q}^{T} M(q) \dot{q} \tag{3} T=21q˙TM(q)q˙(3)
- q ˙ = [ q ˙ c 1 . . . q ˙ c n ] \dot{q}= \begin{bmatrix} \dot{q}_{c1} \\ ... \\ \dot{q}_{cn} \end{bmatrix} q˙=⎣⎡q˙c1...q˙cn⎦⎤ 表示角速度
让 ( 2 ) ( 3 ) (2)(3) (2)(3) 相等,只有M(q)为未知数,则可求得M(q)
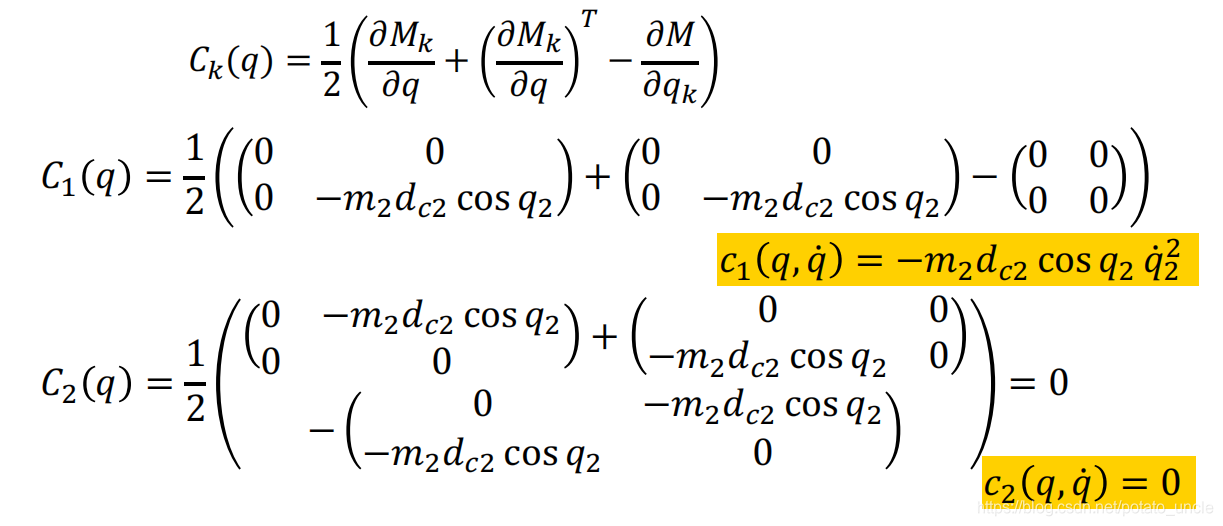
c ( q , q ˙ ) c(q,\dot{q}) c(q,q˙)部分
c k ( q , q ˙ ) = q ˙ T C k ( q ) q ˙ c_{k}(q,\dot{q})=\dot{q}^{T}C_{k}(q)\dot{q} ck(q,q˙)=q˙TCk(q)q˙
C k ( q ) = 1 2 ( ∂ M k ∂ q + ( ∂ M k ∂ q ) T − ∂ M ∂ q k ) (4) C_{k}(q)=\frac{1}{2}(\frac{\partial M_{k}}{\partial q} + (\frac{\partial M_{k}}{\partial q})^{T}- \frac{\partial M}{\partial q_{k}}) \tag{4} Ck(q)=21(∂q∂Mk+(∂q∂Mk)T−∂qk∂M)(4)
这里的 M k M_{k} Mk 的详细解释请参见下方的例题
g(q)部分
g ( q ) = ∂ U ∂ q (5) g(q)=\frac{\partial U}{\partial q} \tag{5} g(q)=∂q∂U(5)
PR机械臂例题
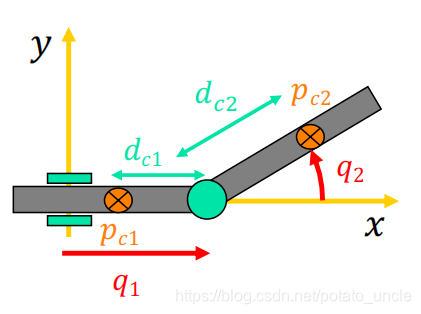
- 第一步,先仔细看题目(
废话),然后写出每个连杆质心的位置坐标 P,比如该题为:
P c 1 = ( q 1 − d c 1 0 0 ) P_{c1}=\begin{pmatrix} q_{1}-d_{c1} \\ 0 \\ 0 \end{pmatrix} Pc1=⎝⎛q1−dc100⎠⎞
P c 1 = ( q 1 + d c 2 c o s ( q 2 ) d c 2 s i n ( q 2 ) 0 ) P_{c1}=\begin{pmatrix} q_{1}+d_{c2}cos(q_{2}) \\ d_{c2}sin(q_{2}) \\ 0 \end{pmatrix} Pc1=⎝⎛q1+dc2cos(q2)dc2sin(q2)0⎠⎞
- 第二步,对 P 的时间 t 求导(其实这里的 q i = q i ( t ) q_{i}=q_{i}(t) qi=qi(t),只是简写为q)得其线速度, 写出其角速度(同理,对q的时间求导), ω 1 = 0 \omega_{1}=0 ω1=0,因为是P类连杆,压根没角速度:
P c 1 ˙ = ( q 1 ˙ 0 0 ) \dot{P_{c1}}=\begin{pmatrix} \dot{q_{1}} \\ 0 \\ 0 \end{pmatrix} Pc1˙=⎝⎛q1˙00⎠⎞
P c 2 ˙ = ( q 1 ˙ − d c 2 s i n ( q 2 ) q 2 ˙ d c 2 c o s ( q 2 ) q 2 ˙ 0 ) \dot{P_{c2}}=\begin{pmatrix} \dot{q_{1}}-d_{c2}sin(q_{2})\dot{q_{2}} \\ d_{c2}cos(q_{2})\dot{q_{2}} \\ 0 \end{pmatrix} Pc2˙=⎝⎛q1˙−dc2sin(q2)q2˙dc2cos(q2)q2˙0⎠⎞
ω 1 = ( 0 0 0 ) \omega_{1}=\begin{pmatrix}0 \\ 0 \\ 0 \end{pmatrix} ω1=⎝⎛000⎠⎞
ω 2 = ( 0 0 q 2 ˙ ) \omega_{2}=\begin{pmatrix}0 \\ 0 \\ \dot{q_{2}} \end{pmatrix} ω2=⎝⎛00q2˙⎠⎞
- 第三步,将上述结果带入式(1),求得动能:
T 1 = 1 2 m 1 q 1 ˙ 2 T_{1} = \frac{1}{2} m_{1} \dot{q_{1}}^2 T1=21m1q1˙2
T 2 = 1 2 m 2 ( q 1 ˙ 2 + d c 2 2 q 2 ˙ 2 − 2 d c 2 s i n ( q 2 ) q 1 ˙ q 2 ˙ ) + 1 2 I c 2 , z z q 2 ˙ 2 T_{2}=\frac{1}{2} m_{2} (\dot{q_{1}}^2+d_{c2}^{2}\dot{q_{2}}^2-2d_{c2}sin(q_{2}) \dot{q_{1}} \dot{q_{2}})+\frac{1}{2}I_{c2,zz}\dot{q_{2}}^2 T2=21m2(q1˙2+dc22q2˙2−2dc2sin(q2)q1˙q2˙)+21Ic2,zzq2˙2
- 第四步,将T带入式(3),求得M(q):

- 第五步,将M 带入式(4)求得 C k ( q ) C_{k}(q) Ck(q) 继而求得 c ( q , q ˙ ) c(q, \dot{q}) c(q,q˙):
- 第六步,按说该求势能部分的,但是这个机械臂是平面的,没有势能,所以 g(q)=0, 所以这一步就是将上边求得的式子带入动力学总公式:
Matlab代码实现
clear all
close all
clc%% 定义各种要用的符号syms m1 m2 m3 m4 real %各连杆质量
syms d1 d2 d3 d4 real %各质心长度
syms L1 L2 L3 L4 L h real %各连杆长度
syms I1xx I1yy I1zz real
syms I2xx I2yy I2zz real
syms I3xx I3yy I3zz real
syms I4xx I4yy I4zz real
syms q1 q2 q3 q4 real %角
syms qv1 qv2 qv3 qv4 real %角速度
syms qa1 qa2 qa3 qa4 real %角加速度
syms u1 u2 u3 u4 g0 real %% 定义下要用的东西q = [q1; q2];
qv = [qv1; qv2];
qa = [qa1; qa2];
%% 求T1pc1 = [q1-d1; 0;0];
vc1=diff(pc1,q1)*qv1+diff(pc1,q2)*qv2;
T1 = 1/2*m1*(vc1'*vc1);%% 求T2pc2 = [q1+d2*cos(q2); d2*sin(q2);0];
vc2=diff(pc2,q1)*qv1+diff(pc2,q2)*qv2;
T2a = 1/2*m2*(vc2'*vc2);om2 = [0; 0; qv2];
T2b = 1/2*om2'*diag([I2xx I2yy I2zz])*om2;T2=T2a+T2b;%% 求总TT = simplify(T1 + T2)%% 求MM(1,1)=diff(T,qv1,2);
M(2,2)=diff(T,qv2,2);
TempB12=diff(T,qv1);
M(1,2)=diff(TempB12,qv2);
M(2,1)=M(1,2);
M=simplify(M)%% 求cM1=M(:,1);
C1=(1/2)*(jacobian(M1,q)+jacobian(M1,q)'-diff(M,q1))
M2=M(:,2);
C2=(1/2)*(jacobian(M2,q)+jacobian(M2,q)'-diff(M,q2))c1=qv'*C1*qv;
c2=qv'*C2*qv;
c=[c1;c2]%% 最终结果M*qa+c == [u1; u2]
相关资料
理论来源于本人机器人学课程的教授——机器人领域老牛:Prof. Alessandro De Luca
老卢卡机器人运动学视频:B站 YouTube
老卢卡机器人动力学视频:B站 YouTube
代码来源于这个好心的老哥


![[计算机数值分析]拉格朗日插值公式](https://img-blog.csdnimg.cn/20210420211706296.png#pic_center)