最近在做的打车项目中,涉及到了用户叫单后,将所有出单司机和所有订单匹配的问题,借此来学习一下二分图的匹配算法。
一、无权二分图最大匹配
首先要区分一下各个概念:
-
匹配:图G的一个匹配是由一组没有公共端点的不是环的边构成的集合。
匹配有两个重点:1. 匹配是边的集合;2. 在该集合中,任意两条边不能有共同的顶点。
注意:二分图无奇圈。 -
完美匹配:考虑部集为X={x1 ,x2, …}和Y={y1, y2, …}的二分图,一个完美匹配就是定义从X-Y的一个双射,依次为x1, x2, … xn找到配对的顶点,最后能够得到 n!个完美匹配。
-
最大匹配:使得所有匹配中总边数最大的匹配。
注意:完美匹配一定是最大匹配,而最大匹配不一定是完美匹配。 -
交错路径:给定图G的一个匹配M,如果一条路径的边交替出现在M中和不出现在M中,我们称之为一条M-交错路径。
-
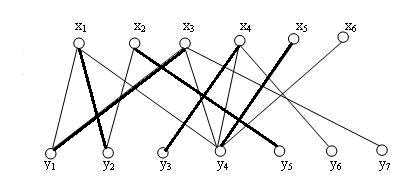
增广路径:如果一条M-交错路径,它的两个端点都不与M中的边关联,我们称这条路径叫做M-增广路径。

如图,这里两条加粗的边2、4是一个匹配M,而1-2-3-4-5构成一条增广路,在这条路径上,存在一个比M更大的匹配(1、3、5)因此,我们寻找最大匹配的任务就相当于我们不断地在已经确定的匹配下,不断找到新的增广路径,因为出现一条增广路径,就意味着目前的匹配中增加一条边!
当匹配中不再存在增广路径,即说明得到了最大匹配
下面我们讨论下匈牙利算法的内容:
- 给定一个图:

为了得到最大匹配,我们的目标是尽可能给x中最多的点找到配对。
刚开始,一个匹配都没有,我们随意选取一条边,(x1, y1)这条边,构建最初的匹配出来,结果如下,已经配对的边用粗线标出:

2. 我们给x2添加一个匹配,如下图的(x2, y2)边。

-
我们现在想给x3匹配一条边,发现它的另一端y1已经被x1占用了,那x3就不高兴了,它就去找y1游说,让y1离开x1。
即将被迫分手的x1很委屈,好在它还有其他的选择,于是 x1 妥协了,准备去找自己看中的y2。
但很快,x1发现 y2 被x2 看中了,它就想啊,y1 抛弃了我,那我就让 y2 主动离开 x2 (很明显,这是个递归的过程)。
x2 该怎么办呢?好在天无绝人之路,它去找了y5。谢天谢地,y5 还没有名花有主,终于皆大欢喜。
匹配如下:

(x3, y1, x1, y2, x2, y5),很明显,这是一条路径P。
而在第二步中,我们已经形成了匹配M,而P原来是M的一条增广路径!上文已经说过,发现一条增广路径,就意味着一个更大匹配的出现,于是,我们将M中的配对点拆分开,重新组合,得到了一个更大匹配,M1, 其拥有(x3, y1),(x1, y2), (x2, y5)三条边。
而这,就是匈牙利算法的精髓:
匈牙利算法寻找最大匹配,就是通过不断寻找原有匹配M的增广路径,因为找到一条M匹配的增广路径,就意味着一个更大的匹配M’ , 其恰好比M 多一条边。4.将x4 , x5 按顺序加入进来,最终会得到本图的最大匹配。
#include <iostream>
#include <stdio.h>
#include <cstring>
#include <vector>
#include<algorithm>using namespace std;const int maxn=10;
int map[maxn][maxn]; //邻接矩阵存图
int nx,ny;
bool vis[maxn];
int link[maxn]; // link[j]=i 表示x方i号点匹配了y方j号点int Hungarian()
{int cnt = 0;for (int i = 0; i < nx; i++){memset(vis, 0, sizeof(vis)); //每一轮都要重置vis数组if (match(i))cnt++;}return cnt;
}bool match(int i)
{for (int j = 0; j < ny; j++)if (map[i][j] && !vis[j]) //有边且未访问{vis[j] = true; //记录状态为访问过if (link[j] == 0 || match(link[j])) //如果暂无匹配,或者原来匹配的左侧元素可以找到新的匹配{link[j] = i; //当前左侧元素成为当前右侧元素的新匹配return true; //返回匹配成功}}return false; //循环结束,仍未找到匹配,返回匹配失败
}int main(){int k;cin>>nx>>ny>>k;for(int i=0;i<k;i++){int x,y;cin>>x>>y;map[x][y]=1;}cout<<Hungarian();system("pause");return 0;
}
二、有权二分图最大匹配
首先要明确一下各个概念:
-
点标号:每一个点都有一个标号,记lx[i]为X方点i的标号,ly[j]为Y方点j的标号。
-
可行点标与可行边:如果对于图中的任意边(i, j, W)都有lx[i]+ly[j]>=W,则这一组点标是可行的。特别地,对于lx[i]+ly[j]=W的边(i, j, W),称为可行边
-
定理:若由二分图中所有满足A[i]+B[j]=w[i,j]的边(i,j)构成的子图(称做相等子图)有完备匹配,那么这个完备匹配就是二分图的最大权匹配。
下面介绍下KM算法的内容:
KM算法的核心思想就是通过修改某些点的标号(但要满足点标始终是可行的),不断增加图中的可行边总数(可行边就是两点标号之和恰为二者边权的边),直到图中存在仅由可行边组成的完全匹配为止,此时这个匹配一定是最佳的。
-
求出每个点的初始标号:lx[i]=max{e.W|e.x=i}(即每个X方点的初始标号为与这个X方点相关联的权值最大的边的权值),ly[j]=0(即每个Y方点的初始标号为0)。
这个初始点标显然是可行的,并且与任意一个X方点关联的边中至少有一条可行边。
-
从每个X方点开始DFS增广。DFS增广的过程与最大匹配的Hungary算法基本相同,只是要注意两点:一是只找可行边,二是要把搜索过程中遍历到的X方点全部记下来(可以用vst搞一下),以进行后面的修改
-
增广的结果有两种:若成功(找到了增广路),则该点增广完成,进入下一个点的增广。
若失败(没有找到增广路),则需要改变一些点的标号,使得图中可行边的数量增加。方法为:在增广过程中遍历到的X方点的标号全部减去一个常数d,所有遍历到的Y方点的标号全部加上一个常数d,经过这一步后,图中至少会增加一条可行边。
d = min(lx[i]+ly[j]-W),其中i是参与此次增广过程的X点,j是未参与此次增广过程的Y点
-
修改后,继续对这个X方点DFS增广,若还失败则继续修改,直到成功为止
以上就是KM算法的基本思路。但是朴素的实现方法,时间复杂度为O(n4)——需要找O(n)次增广路,每次增广最多需要修改O(n)次顶标,每次修改顶标时由于要枚举边来求d值,复杂度为O(n2)。
实际上KM算法的复杂度是可以做到**O(n3)**的。我们给每个Y顶点一个“松弛量”函数slack,每次开始找增广路时初始化为无穷大。
在寻找增广路的过程中,检查边(i,j)时,如果它不在相等子图中,则让slack[j]变成原值与lx[i]+ly[j]-w[i,j]的较小值。
这样,在修改顶标时,取所有不在交错树中的Y顶点的slack值中的最小值作为d值即可。
但还要注意一点:修改顶标后,要把所有的slack值都减去d。
注意以下几点:
1,匹配两边节点不需要相等;但是需要nx<=ny
2,求最小权的时候只需要将权值取负,在求最大权即可;//十分有效
3,不存在的边权初始化为负无穷大;
#include <iostream>
#include <cstdio>
#include <cstring>
#include <algorithm>
#define inf 100000000
using namespace std;const int maxn=100;
int map[maxn][maxn];
int nx,ny;
int link[maxn];
int visx[maxn],visy[maxn];
int lx[maxn],ly[maxn];
int slack[maxn];int KM();int main(){cin>>nx>>ny;for(int i=0;i<nx;i++)for(int j=0;j<ny;j++){cin>>map[i][j];}printf("%d\n", KM());system("pause");return 0;
}int KM() {memset(link, -1, sizeof(link));// lx 和 ly的初始化memset(ly, 0, sizeof(ly));for (int i=0; i<nx; i++) {lx[i] = -inf;for (int j=0; j<ny; j++) {lx[i] = max(lx[i], map[i][j]);}}// 从x集合的每个点寻找增广路for (int x=0; x<nx; x++) {for (int i=0; i<ny; i++) //slack 的初始化对当前点寻找增广路的左右过程中有效{ slack[i] = inf;}while(1) {memset(visx, 0, sizeof(visx)); //每次寻找增广路之前初始化memset(visy, 0, sizeof(visy));if (dfs(x)) break; //该点增广完成// 否则修改可行顶标int d = inf;for (int i=0; i<ny; i++) {if (!visy[i])d = min(d, slack[i]);}for (int i=0; i<nx; i++) {if (visx[i]) lx[i] -= d;}for (int i=0; i<ny; i++) {if (visy[i]) ly[i] += d;else slack[i] -= d;}}}int res = 0;for (int i=0; i<ny; i++) { //必定已经找到一个所有相等子图的点导出的完美匹配if (link[i] != -1)res += map[link[i]][i]; // 右集合i的匹配点link[i] 这里不像无向图那样,需要注意顺序---------}return res;
}bool dfs(int x) {visx[x] = 1; // 左集合访问到的点一定都在交错树中for (int i=0; i<ny; i++) {if (visy[i]) continue;int w = lx[x] + ly[i] - map[x][i];if (w == 0) //可行边{visy[i] = 1; // 右集合的点在相等子图中 就一定在交错树中if (link[i] == -1 || dfs(link[i])) {link[i] = x;return 1;}}else slack[i] = min(slack[i], w); // 修改不在相等子图中的点的slack值}return 0;
}