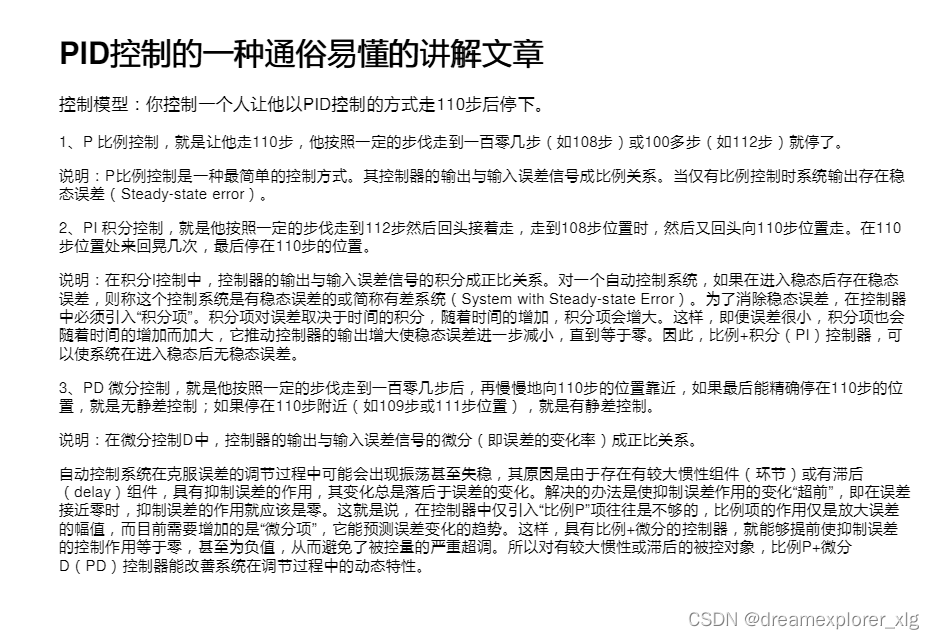
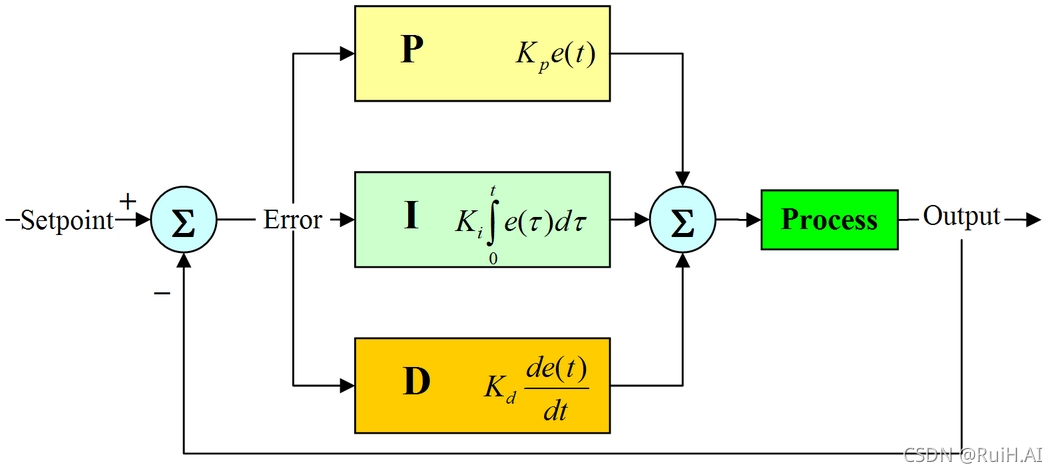
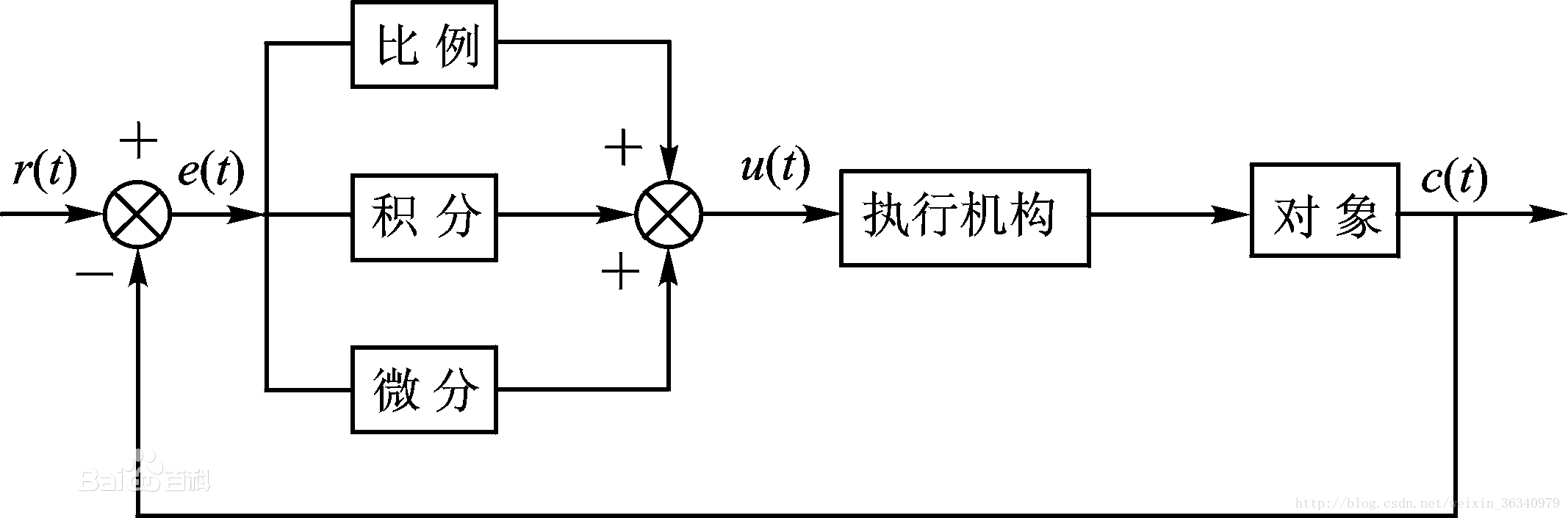
在讲解模糊PID前,我们先要了解PID控制器的原理(本文主要介绍模糊PID的运用,对PID控制器的原理不做详细介绍)。PID控制器(比例-积分-微分控制器)是一个在工业控制应用中常见的反馈回路部件,由比例单元P、积分单元I和微分单元D组成。PID控制的基础是比例控制;积分控制可消除稳态误差,但可能增加超调;微分控制可加快大惯性系统响应速度以及减弱超调趋势。
1.1传统PID控制
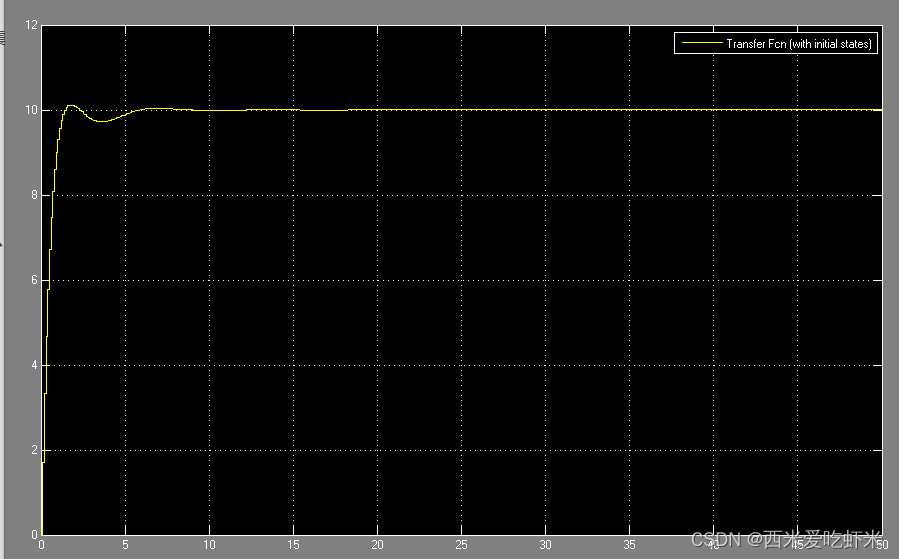
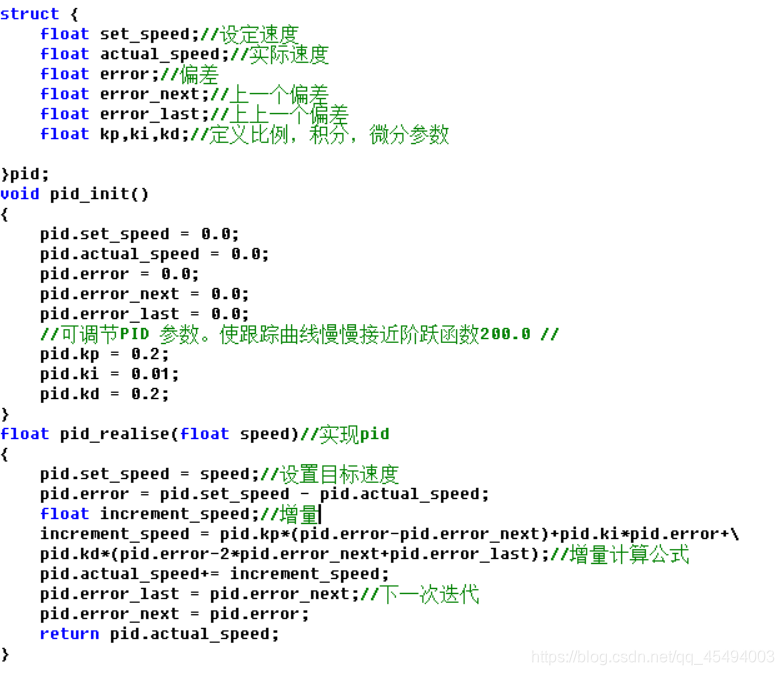
传统PID控制器自出现以来,凭借其结构简单、稳定性好、工作可靠、调整方便等优点成为工业控制主要技术。当被控对象的结构和参数具有一定的不确定性,无法对其建立精确的模型时,采用PID控制技术尤为方便。PID控制原理简单、易于实现,但是其参数整定异常麻烦。对于小车的速度控制系统而言,由于其为时变非线性系统不同时刻需要选用不同的PID参数,采用传统的PID控制器,很难使整个运行过程具有较好的运行效果。
1.2模糊PID控制
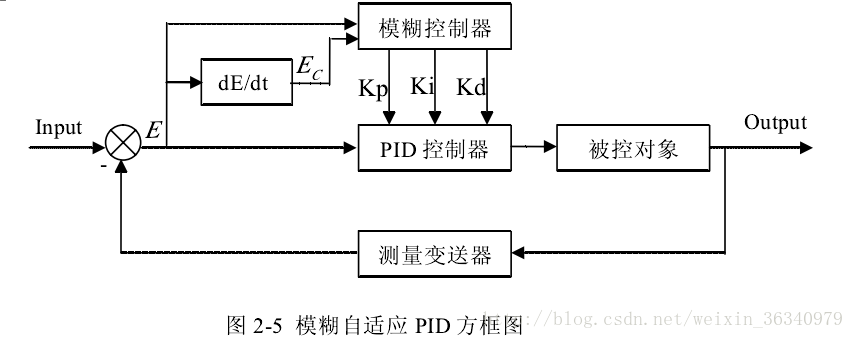
模糊PID控制,即利用模糊逻辑并根据一定的模糊规则对PID的参数进行实时的优化,以克服传统PID参数无法实时调整PID参数的缺点。模糊PID控制包括模糊化,确定模糊规则,解模糊等组成部分。小车通过传感器采集赛道信息,确定当前距赛道中线的偏差E以及当前偏差和上次偏差的变化ec,根据给定的模糊规则进行模糊推理,最后对模糊参数进行解模糊,输出PID控制参数。
2.1模糊化
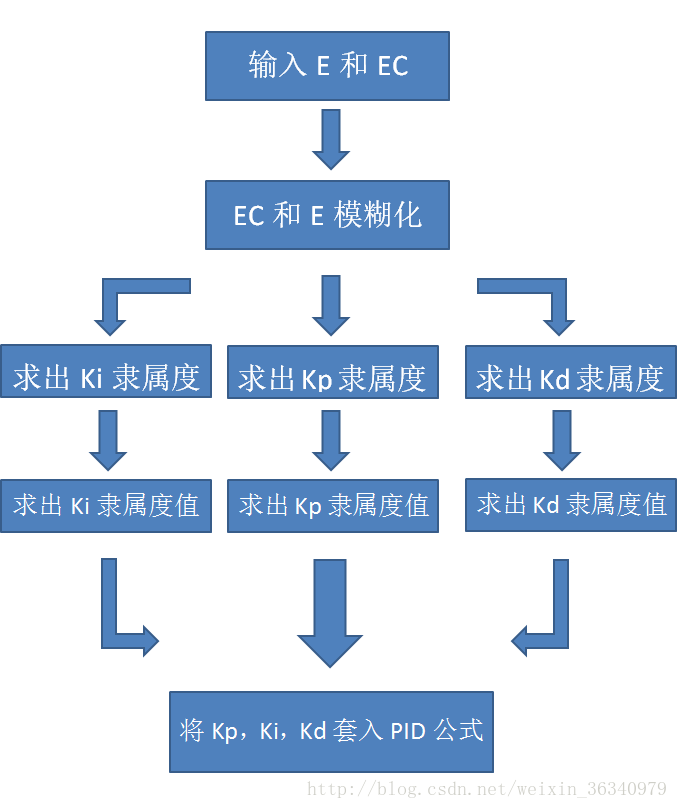
模糊控制器主要由三个模块组成:模糊化,模糊推理,清晰化。具体如下图所示。而我们将一步步讲解如何将模糊PID算法运用到智能车上。(最好用笔一步步自己写一遍!!!)

首先我们的智能车会采集到赛道的相关数据,例如摄像头车,其采集到的数据经过算法处理之后会得到与中线的偏差E,以及当前偏差和上次偏差的变化(差值)EC两个值(即此算法为2维输入,同理也可以是1维和3维,但2维更适合智能车)。例如此时车偏离中线的距离为150,而上一时刻偏离中线的距离为120,则E为150,EC为150 - 120 = 30。
其次我们要对这两个值进行模糊化。这里我们对E进行举例。摄像头车采集回来的E是有范围的,即与中线的偏差是在一个区间内可行的。在这里我们假设该区间为-240到240,即小车偏离中线的最大距离为240,正负即为左右。再假设中线偏差变化率的可行区间为-40到+40。
接着我们要对这两个值进行模糊化。我现在将E的区间(-240 到 240)分成8个部分,那么他们分别为-240 ~ -180,-180 ~ -120 ,-120 ~ -60,-60 ~ 0,0 ~ 60,60 ~ 120,120 ~ 180,180 ~ 240。然后我们把-180,-120,-60,0,60,120,180分别用NB,NM,NS,ZO,PS,PM,PB表示(个人理解N为negative,P为positive,B为big,M为middle,S为small,ZO为zero)。例如,当E = 170时,此时的E属于PM和PB之间,而此时的E也会对应2(或1)个隶属度。E隶属于PM(120)的百分比为(180 - 170) / (180 - 120) = 1 / 6 ,而同理隶属于PB(180)的百分比为(170 - 120) / (180 - 120) = 5 / 6 。意思就是120到180进行线性分割了,E离PM和PB哪个更近,则隶属于哪个就更大(当输出值E大于180(PB)时,则隶属度为1,隶属度值为PB,即E完全隶属于PB,同理当E小于 - 180 (NB)时也一样)。同理也可以对EC进行模糊化。
2.2 模糊推理
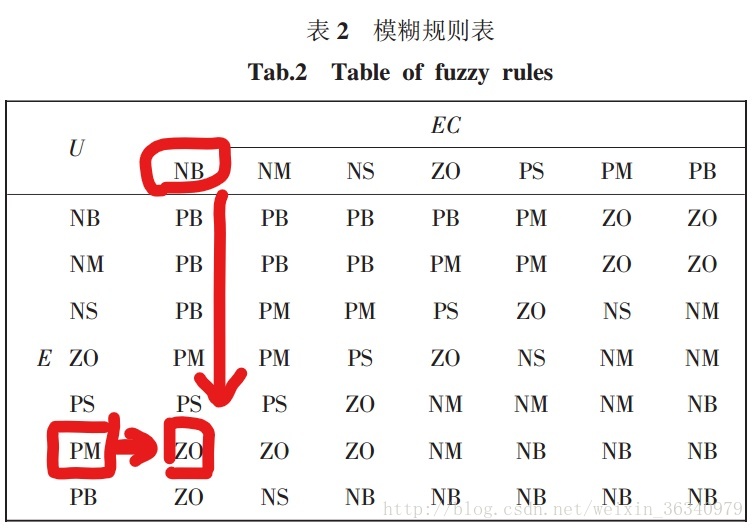
对于采集回来的E和EC,我们可以推出它们各所占的隶属度,此时我们可以根据模糊规则表去找出输出值所对应的隶属度。
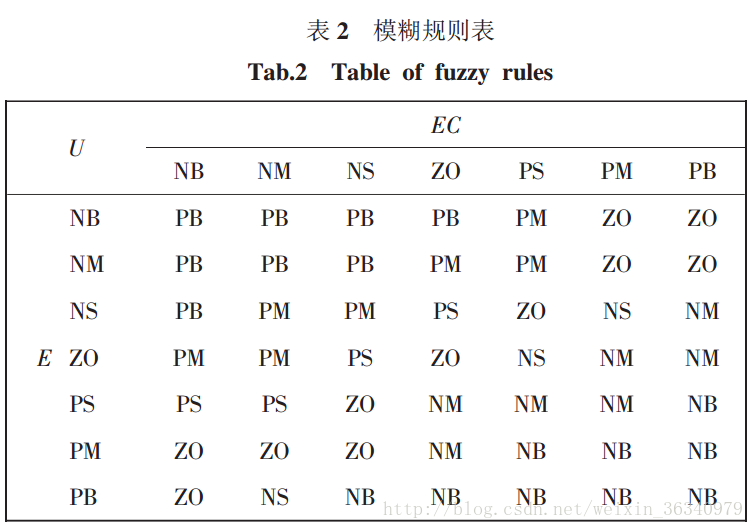
我们假设为E的两个隶属度值为PM、PB,E属于PM的隶属度为a(a < 1),则属于PB的隶属度为(1 - a)。再假设EC的两个隶属度值为NB、NM,EC属于NM的隶属度为b,则属于NB的隶属度为(1 - b)。而在假设中,E属于PM的隶属度为a,EC属于NB的隶属度为( 1 - b ),则输出值属于ZO的隶属度为a *( 1 - b )(看图)。
同理我们可以得出,当输出值属于ZO的另外两个隶属度为a * b, ( 1 - a ) * ( 1 - b) ,而输出值属于NS的隶属度为 ( 1 - a ) * b。
在这里我们先证明一个条件,将这四个隶属度加起来,刚好等于1。这是因为
(a + (1 - a)) * (b + (1 - b)) = a * b + ( 1 - a ) * b + a * ( 1 - b ) + ( 1 - a ) * ( 1 - b ) (下图)
即一个十字相乘的概念。这个等式说明输出值的隶属度之和等于1(第三步求解的时候需要用到隶属度之和)。

因此,我们知道了输出值为ZO的隶属度和为 a * b + a * ( 1 - b ) + ( 1 - a ) * ( 1 - b ) ,输出值为NS的隶属度为 ( 1 - a ) * b 。
2.3 清晰化
对于输出值,我们同样采用给予隶属度的办法。例如,我们把输出值假设为[1000,1400](即舵机的摆角值范围)的区间同样划分为八个部分,即7个隶属值NB,NM,NS,ZO,PS,PM,PB。根据上一步所得出的结论,我们就可以用隶属度乘以相应的隶属值算出输出值的解,即 (a * b + a * ( 1 - b ) + ( 1 - a ) * ( 1 - b ) ) * ZO + ( 1 - a ) * b * NS。到此为止,整个模糊过程就结束了。
3 模糊PID
我们已经知道了整个模糊的过程,但上述的过程还不够完美。因为我们的输出值只有一个输出,并没有实现PID。因此我们可以先对E和EC进行模糊化,然后分别对kp和ki和kd(PID的三个参数)进行求解,再套入公式。
一般的我们也可以只用kp,kd,不用ki。而模糊规则表一般的论文已经基本给出。因此带入算法之后我们的难度也只是在于调节kp,kd,和适当调节规则表。当然调节的难度会大于普通的PID,因为还要定kp,kd的输出范围,调得不好可能效果并没有普通的PID好。
4. 部分解释
4.1对于部分论文所说的重心法解模糊,其实就是上述方法。公式如下。
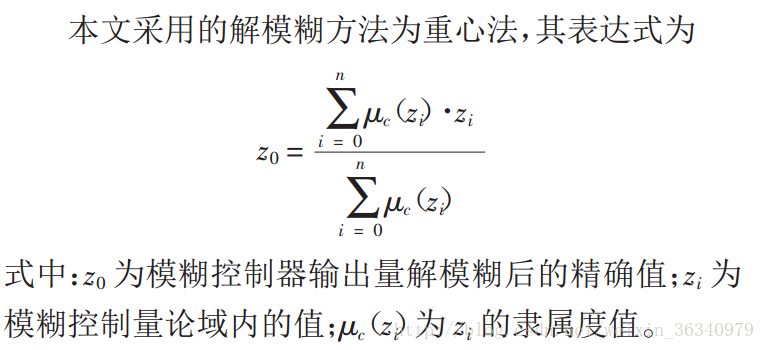
式中μ(Zi) * Zi相当于文章上面的(a * b + a * ( 1 - b ) + ( 1 - a ) * ( 1 - b ) ) * ZO + ( 1 - a ) * b * NS,即隶属度乘以隶属度值之和,而μ(Zi)之和就是输出值的隶属度之和,我们已经证明它是等于1的。
参考
[1] https://blog.csdn.net/weixin_36340979/article/details/79168052
[2] https://blog.csdn.net/foxclever/article/details/83932107