我们使用MySQL数据库的时候,绝大部分的情况下在使用InnoDB存储引擎,偶尔会使用MyISAM存储引擎,至于其他存储引擎,我相信大家都很少接触到,甚至可能都没有听说过。所以本文只讲解InnoDB和MyISAM两个存储引擎的索引,以及如何计算这两个存储引擎的索引结构B+Tree的高度。
InnoDB
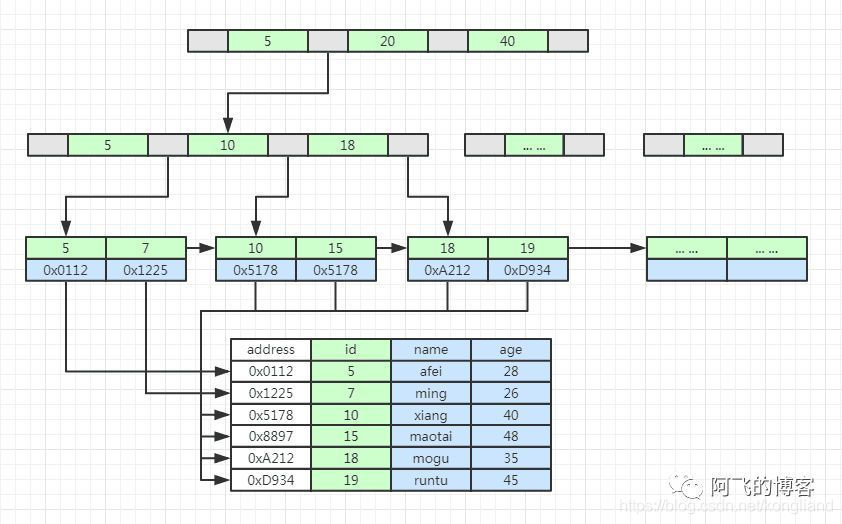
InnoDB主键索引示意图如下,非叶子节点上没有实际的数据,只有叶子节点上才有实际的数据,并且叶子节点之间有指针串联指向下一个叶子节点,这样能够提升范围查询的效率:
InnoDB B+Tree主键索引示意图
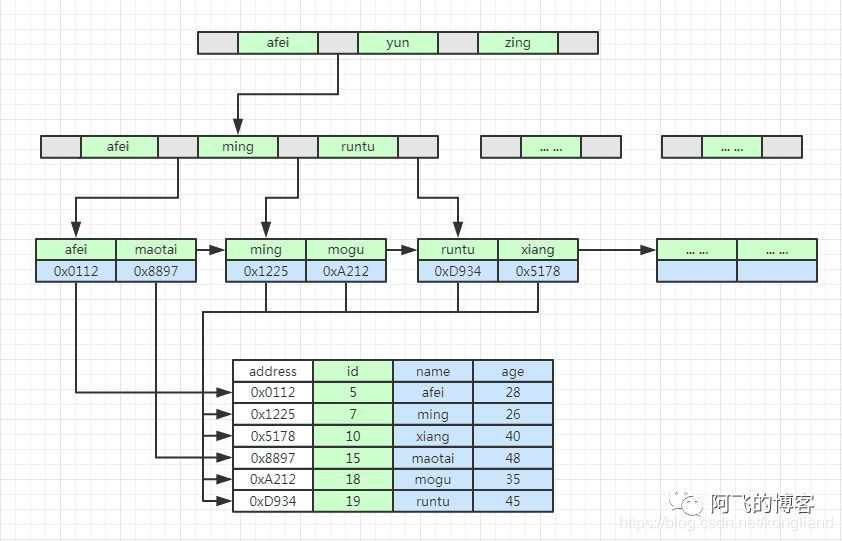
InnoDB使用了聚簇索引(Clustered),即所有二级索引聚集在主键索引上,对InnoDB存储引擎表的任何访问,最终一定要搜索主键索引树,二级索引的示意图如下:

InnoDB B+Tree二级索引示意图
在InnoDB中,二级索引(所有不是主键索引的索引)上没有实际的数据,取而代之的是主键索引的值。这样的话,如果是基于二级索引的查询,会先在二级索引上搜索得到主键索引的值,然后再去主键索引树上搜索,得到最终的行数据。
这就意味着,至少有一次索引查找,可能会有两次索引查找,其中一定有一次主键索引查找。
所以,在InnoDB中,主键要设计的尽量小,主键越小,二级索引也会越小。满足需求的情况下,SMALLINT优先于INT,INT优先于BITINT,INTEGER类型优先于VARCHAR类型。如果主键用更大的数据类型,由于二级索引上有主键索引的值,那么不只是主键索引树变的更大更高,其他的二级索引树也会更大更高,这绝对是一个糟糕的做法。
MyISAM
MyISAM没有使用聚簇索引,所以主键就是一个普通的唯一索引,并且基于索引查询只会搜索当前索引,不会和其他索引有任何关系,任意两个索引之间互不影响。如下图所示,是MyISAM的主键索引示意图,我们可以看到,索引树的叶子节点上只有表中行数据的地址,而不是和InnoDB一样,有实际的数据:
MyISAM的主键索引示意图
如下图所示,是MyISAM的二级索引示意图,我们可以看到,其结构几乎和主键索引示意图一样,叶子结点上也有表中行数据的地址:
MyISAM的二级索引示意图
B+TREE高度
了解B+Tree索引的大概结构后,我们接下来讲解一下如何计算索引树的高度。
我们先做如下假设:
表的记录数是N;
每个BTREE节点平均有B个索引KEY(即1,2,3,4,5… …);
很明显,这时候B+TREE索引树的高度就是logBN(等价于logB/logN)。需要说明的是,这里的对数以及接下来有对数的地方应该是下图中的对数,笔者不知道如何将word中的对数复制过来,所以请将就一下下(尴尬 ̄□ ̄):
对数
另外我们知道,由于索引树每个节点大小固定,所以索引KEY越小,B值就越大,即每个BTREE节点上可以保存更多的索引KEY。并且索引树的高度是logBN,那么B值越大,索引树的高度越小,那么基于索引查询的性能就越高。所以我们可以得到结论:相同表记录数的情况下,索引KEY越小,索引树高度就越小。
现在,我们假设表有1600w条记录(因为2^24≈1600w,便于接下来的计算),如果每个节点保存64个索引KEY,那么索引高度就是 (log10^7)/log64 ≈ 24/6 = 4。
所以,由上面的演算可知,我们要计算一张表的索引树的高度,还只需要知道一个节点有多大,从而就能知道每个节点能存储多少个索引KEY。现代数据库经过不断的探索和优化,并结合磁盘的预读特点,每个索引节点一般都是操作系统页的整数倍,操作系统页可通过命令得到该值得大小,且一般是4094,即4k。而InnoDB的pageSize可以通过命令得到,默认值是16k。
关于预读:在索引树上查到某个KEY(例如id=3),需要先找到这个KEY所在的叶子节点(因为B+Tree索引只有叶子节点上有具体的数据),这个查找过程从根节点到叶子节点,需要经过整个树。当找到叶子节点后,会根据预读原理将整个节点数据全部加载到内存中,然后基于二分法找到最终的KEY。
OK,到这里,我们距离真正计算一个拥有1600w数据的表的索引树的高度,只差每个索引KEY所占空间了。
以BIGINT为例,存储大小为8个字节。INT存储大小为4个字节(32位)。索引树上每个节点除了存储KEY,还需要存储指针。所以每个节点保存的KEY的数量为pagesize/(keysize+pointsize)(如果是B-TREE索引结构,则是pagesize/(keysize+datasize+pointsize))。
假设平均指针大小是4个字节,那么索引树的每个节点可以存储16k/((8+4)*8)≈171。那么:一个拥有1600w数据,且主键是BIGINT类型的表的主键索引树的高度就是(log10^7)/log171 ≈ 24/7.4 ≈ 3.2。
假设平均指针大小是6个字节,那么索引树的每个节点可以存储16k/((8+6)*8)≈146。那么:一个拥有1600w数据,且主键是BIGINT类型的表的主键索引树的高度就是(log10^7)/log146 ≈ 24/7.2 ≈ 3.3。
假设平均指针大小是8个字节,那么索引树的每个节点可以存储16k/((8+8)*8)≈128。那么:一个拥有1600w数据,且主键是BIGINT类型的表的主键索引树的高度就是(log10^7)/log128 ≈ 24/7 ≈ 3.4。
由上面的计算可知:一个千万量级,且存储引擎是MyISAM或者InnoDB的表,其索引树的高度在3~5之间。
说明:这一段对索引树高度的计算,都是基于B+Tree,即InnoDB和MyISAM存储引擎的索引用到的数据结构。而B-TREE索引节点上不仅保存了索引和指针,还保存了具体的行数据,索引树的高度算法略有不同。
总结
索引树的高度是一个非常重要的东西,因为当查找的条件能用到索引时,就不用全表扫描,而是只需要在索引上搜索,从索引的根节点到叶子节点。并且很明显的是:索引树越高,性能就会越差。我们假设在最糟糕的情况下,索引一点没有被加载到内存中,而是全部持久化在磁盘上。那么索引树有多高,就表示查询至少需要多少次IO操作。即使实际情况中,由于表的数据更多,索引也会很大,不大可能全部被保存在缓存中。而且如果是二级索引搜索,IO次数还要翻倍(二级索引搜索+主键索引搜索),这对性能是一个很大的影响。
这也是MySQL数据库使用B+Tree作为索引结构的原因:尽可能降低索引树的高度。而红黑树等其他数据结构,树的高度要深的多的多。