
相关文章

SMART PLC PID算法基本解析(附公式)
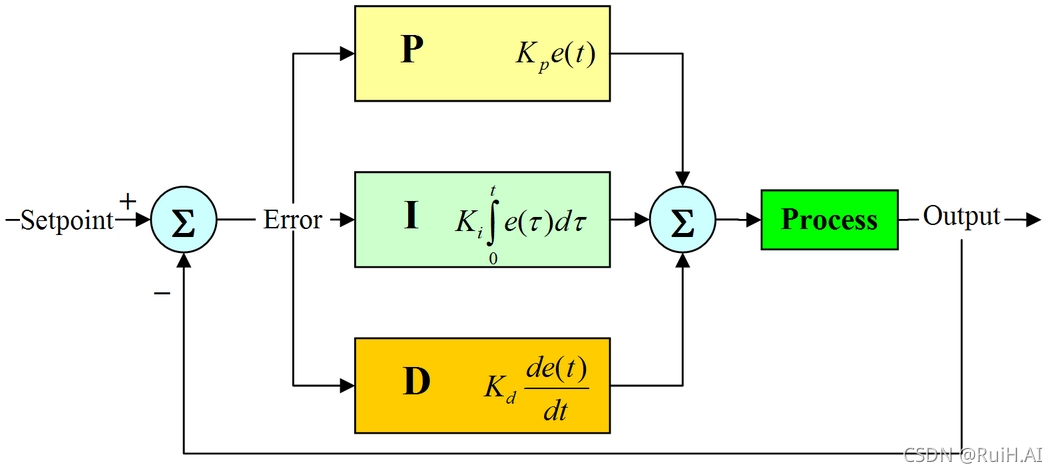
在稳态运行中,控制器调节输出值,使偏差 (e) 为零。偏差是设定值(目标值)与过程变量(实际值、反馈值)之差。输出 = 比例项 + 积分项 + 微分项 离散化的PID公式基本框架几乎一样,不同的厂家描述符号,变量名称定义可能不太一样, 从公式中可以看出,积分项是从第一次采样到…

PID算法-理论分析
连续PID算法
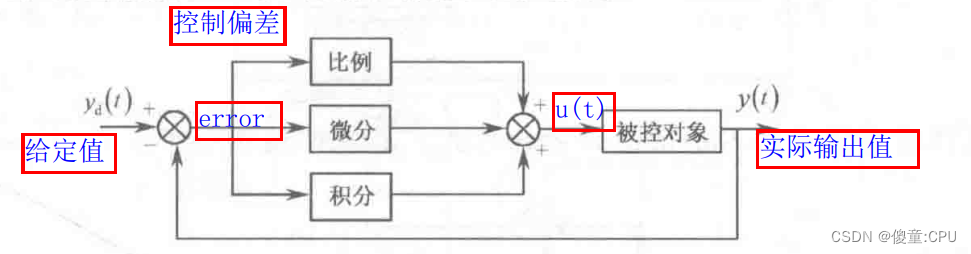
典型PID算法框图 r(t):设定状态量y(t):实际状态量e(t):当前误差u(t):控制 器输出
P-比例环节 u p ( t ) K p ∗ e ( t ) K p [ r ( t ) − y ( t ) ] u_{p}(t)Kp*e(t)Kp[r(t)-y(t)] up(t)Kp∗e(t)Kp[r(t)−y(t)…

PID控制器整理分享
概述
日常开发中,常常需要对速度、温度等物理量进行稳态控制,而在目前的自动化控制原理中,使用最为广泛的方法就是PID控制算法。本文简要整理分享PID控制器的使用。
正文
PID控制器,即比例-积分-微分控制器。它是一个不依赖系统…

《PID》一篇文章带你搞懂使用PID
节选自本人博客:https://www.blog.zeeland.cn/archives/pid-learning 本文为笔者参考了网上众多大神的解析之后加上自己的理解整合起来的,因此在内容上部分参考了其他作者,目的仅用作参考以便更好地学习,如有侵犯,可联…
PID控制及公式讲解
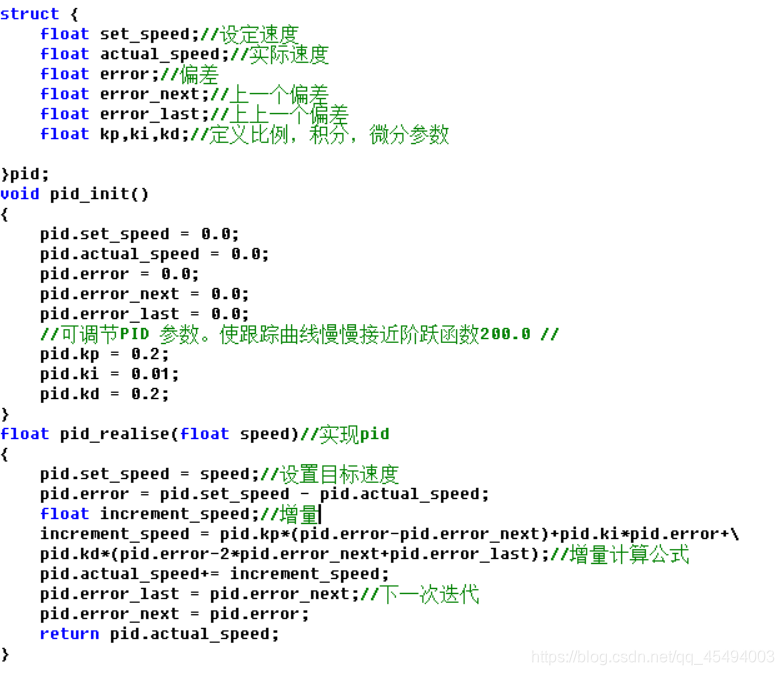
1、PID引入 2、PID代码
/*******************************************************************位置式pid********************************************************************/
double PID(double Actual,double SET){ static double E_sum,Error_last; //上一…


一文读懂PID控制算法(抛弃公式,从原理上真正理解PID控制)
一文读懂PID控制算法(抛弃公式,从原理上真正理解PID控制)
PID控制应该算是应用非常广泛的控制算法了。小到控制一个元件的温度,大到控制无人机的飞行姿态和飞行速度等等,都可以使用PID控制。这里我们从原理上来理解PI…

PID公式的推导过程及实现代码
一、PID框图: n0(t)是要稳定的值 n(t)是当前输出值 e(t) n0(t) - n(t) 一、模拟PID控制原理 这个公式网络上很好找: 二、数字PID控制 由于模拟的微积分运算对应计算机来说是不太好写代码的,所以要利用采样将数据离散化 于是公式就可以转换…




PID控制(个人学习)
title:控制策略 date:2020-3-22 author:Page categories: -控制策略 tages: -控制
比例积分微分控制,简称PID控制 因为以下优点被人们广泛使用于各个领域 a. 技术成熟 b. 易被人们熟悉和掌握 c. 不需要建立数学模型 d. 控制效果好 e. 鲁棒性
通常依据控…

控制算法学习 二、PID控制算法
控制算法学习 二、PID控制 前言PID算法比例环节P积分环节I微分环节D 离散PID位置式PID增量式PID 前言
PID应该是应用最广泛的控制算法(没有之一)。无人机中的飞控就是基于PID的。
PID算法
PID——Proportional, Integral, Derivate,就是比…

PID算法的原理和公式
PID算法的原理和公式
(PID)
PID算法原理
P:即Proportion,输入偏差乘以比例常数I:即Integral,对输入偏差进行积分运算D:即Derivative,对输入偏差进行微分运算 输入偏差读取值与设定值(理想值&…