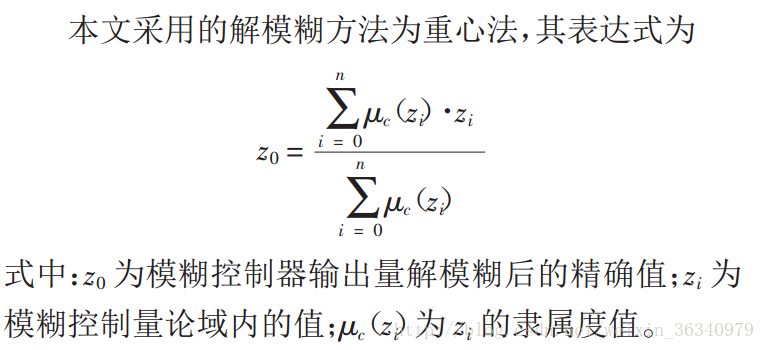
连续PID算法
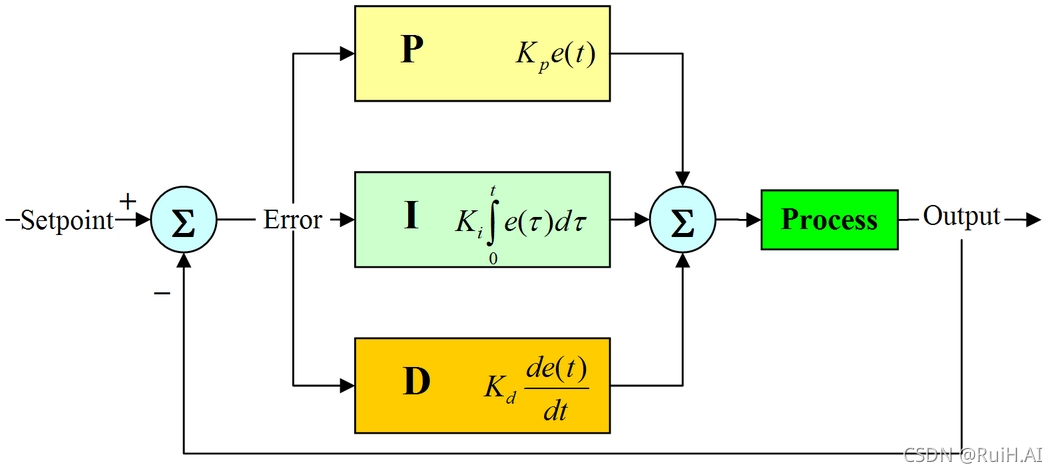
- 典型PID算法框图

- r(t):设定状态量
- y(t):实际状态量
- e(t):当前误差
- u(t):控制 器输出
P-比例环节
u p ( t ) = K p ∗ e ( t ) = K p [ r ( t ) − y ( t ) ] u_{p}(t)=Kp*e(t)=Kp[r(t)-y(t)] up(t)=Kp∗e(t)=Kp[r(t)−y(t)]
- 当误差存在时才会输出up(t)
- 比例调节的过程就是即时成比例地反应控制系统的偏差信号e(t)。偏差一旦产生,通过Kp*e(t)产生控制作用以减小偏差
- 若误差e(t)=0,则up(t)=0。而在现实中,没有输出的受控对象是不稳定的,所以单独的P调节时钟会存在误差
- 设定值与实际值之间总会存在一定的偏差,称之为静差
P-减小偏差
比例环节是对偏差的直接增益,如果只使用比例环节,系统会存在静差
I-积分环节
u i ( t ) = K i ∗ ∫ 0 t e ( t ) d t u_{i}(t)=Ki*\int_0^t{e(t)}dt ui(t)=Ki∗∫0te(t)dt
- 积分环节的输出ui(t)根系统的误差e(t)累加和有关
- 当系统存在误差,积分环节将误差累加后就会起调节作用,直到误差为0后控制器稳定输出
- 积分环节可以消除系统的比例环节稳态误差,消除静差
- 一般常用PI调节:up(t)+ui(t),使得实际状态量=设定状态量
I-消除静差
积分环节主要是用来消除静差的,积分环节实际上是偏差累计的过程。将一个小的偏差累积到足以使控制系统执行动作,也就可以消除掉静差。所以,积分环节就是把累计的误差加到系统上以抵消的静差
D-微分环节
u d ( t ) = K d ∗ d e ( t ) d t u_{d}(t)=Kd*\frac{de(t)}{dt} ud(t)=Kd∗dtde(t)
- 微分环节的输出ud(t)跟系统的误差变化率有关
- 根据现在的趋势去判断未来,进而来阻碍未来可能出现过调的趋势(阻尼作用)
D-超前调节
微分信号则反应了偏差信号的变化规律(变化趋势),根据这个趋势来进行超前调节,从而增加系统的快速性
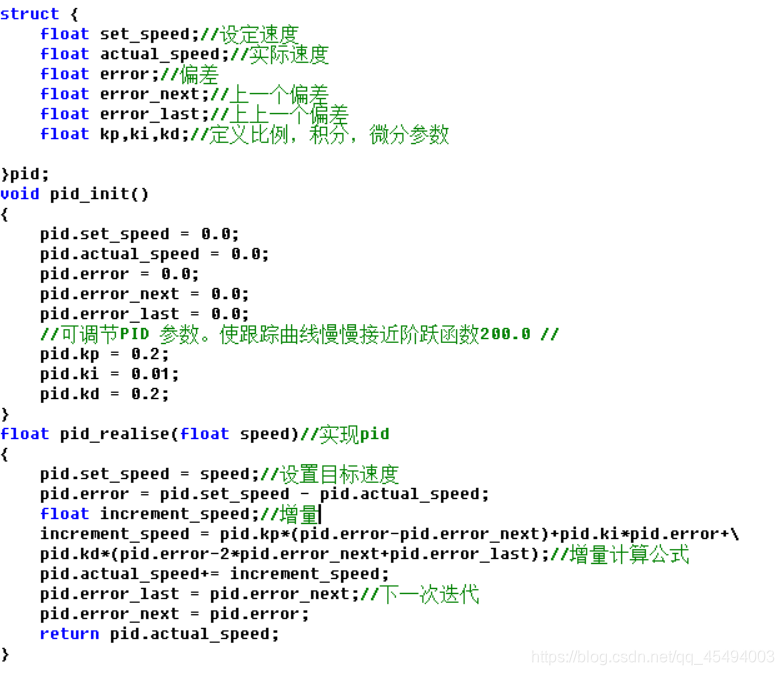
连续PID公式
u ( t ) = u p ( t ) + u i ( t ) + u d ( t ) = K p ∗ e ( t ) + K i ∗ ∫ 0 t e ( t ) d t + K d ∗ d e ( t ) d t u(t)=u_{p}(t)+u_{i}(t)+u_{d}(t)=Kp*e(t)+Ki*\int_0^t{e(t)}dt+Kd*\frac{de(t)}{dt} u(t)=up(t)+ui(t)+ud(t)=Kp∗e(t)+Ki∗∫0te(t)dt+Kd∗dtde(t)
离散PID算法
-
连续系统的PID算法实际上是一种采样控制,它只能根据采样时刻的偏差来计算控制量。而在计算机系统中,需要对公式进行离散化,具体就是用求和代替积分,用向后差来代替微分,使模拟PID离散化为数字形式的差分方程
-
接下来对连续PID各环节进行离散化,设采样间隔为T,则在KT时刻
P-比例环节
e ( k ) = r ( k ) − y ( k ) e(k)=r(k)-y(k) e(k)=r(k)−y(k)
I-积分环节
∫ 0 k e ( k ) d k = e ( 0 ) + e ( 1 ) + . . . + e ( k − 1 ) + e ( k ) \int_0^k{e(k)}dk=e(0)+e(1)+...+e(k-1)+e(k) ∫0ke(k)dk=e(0)+e(1)+...+e(k−1)+e(k)
D-微分环节
d e ( t ) d t = e ( k ) − e ( k − 1 ) T \frac{de(t)}{dt}=\frac{e(k)-e(k-1)}{T} dtde(t)=Te(k)−e(k−1)
离散化PID公式
u ( k ) = K p ∗ [ r ( k ) − y ( k ) ] + K i ∗ [ e ( 0 ) + e ( 1 ) + . . . + e ( k − 1 ) + e ( k ) ] + K d ∗ e ( k ) − e ( k − 1 ) T u(k)=Kp*[r(k)-y(k)]+Ki*[e(0)+e(1)+...+e(k-1)+e(k)]+Kd*\frac{e(k)-e(k-1)}{T} u(k)=Kp∗[r(k)−y(k)]+Ki∗[e(0)+e(1)+...+e(k−1)+e(k)]+Kd∗Te(k)−e(k−1)