在数学和自动控制领域中,李雅普诺夫稳定性(英语:Lyapunov stability,或李亚普诺夫稳定性)可用来描述一个动力系统的稳定性。如果此动力系统任何初始条件在 {\displaystyle x_{0}} 转存失败重新上传取消
转存失败重新上传取消 转存失败重新上传取消转存失败重新上传取消
转存失败重新上传取消转存失败重新上传取消
若任何初始条件在 {\displaystyle x_{0}}转存失败重新上传取消转存失败重新上传取消转存失败重新上传取消
李雅普诺夫稳定性可用在线性及非线性的系统中。不过线性系统的稳定性可由其他方式求得,因此李雅普诺夫稳定性多半用来分析非线性系统的稳定性。李亚普诺夫稳定性的概念可以延伸到无限维的流形,即为结构稳定性,是考虑微分方程中一群不同但“接近”的解的行为。输入-状态稳定性(ISS)则是将李雅普诺夫稳定性应用在有输入的系统。
目录
- 1历史
- 2连续时间系统下的定义
- 3迭代系统下的定义
- 4李雅普诺夫稳定性理论
- 4.1李雅普诺夫稳定性第二定理
- 5线性系统状态空间模型的稳定性
- 6有输入值系统的稳定性
- 7相关条目
- 8参考资料
- 9外部链接
历史[编辑]
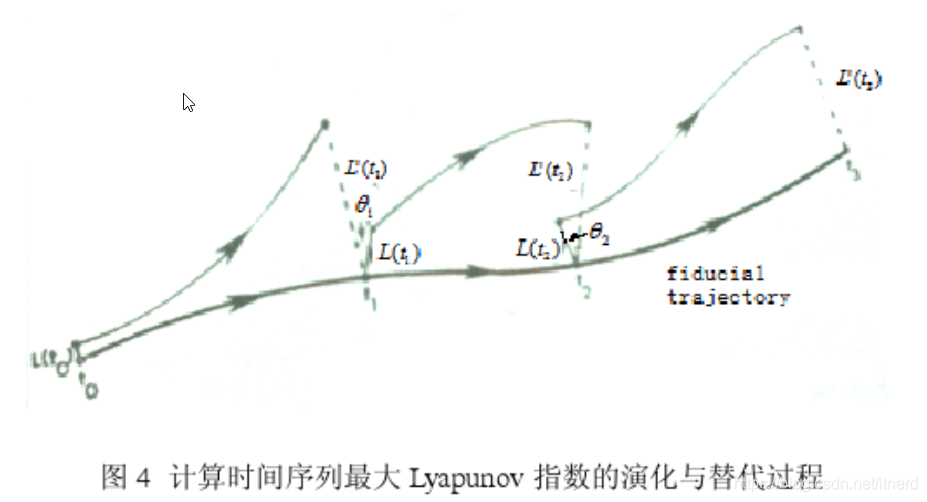
这一稳定性以俄国数学家亚历山大·李亚普诺夫命名,他在1892年发表了他的博士论文《运动稳定性的一般问题》,文中给出了稳定性的科学概念、研究方法和相关理论。李雅普诺夫考虑到针对非线性系统修改稳定理论,修正为以一个稳定点线性化的系统为基础的线性稳定理论。他的作品最初以俄文发行,后翻译为法文,但多年来默默无闻。人们对它的兴趣突然在冷战初期(1953至1962年)开始,因当所谓的“李雅普诺夫第二方法”被认为适用于航空航天制导系统的稳定性,而这系统通常包含很强的非线性,其他方法并不适用。大量的相关出版物自那时起开始出现,并进入控制系统文献中。最近李雅普诺夫指数的概念(与李雅普诺夫稳定性第一种方法)引起了广泛兴趣,并与混沌理论结合了起来。
连续时间系统下的定义[编辑]
给定一个完备的赋范向量空间E(例如{\displaystyle \mathbb {R} ^{n}}转存失败重新上传取消
{\displaystyle {\dot {x}}=f(x(t)),\;\;\;\;x(t_{0})=x_{0}}转存失败重新上传取消
其中{\displaystyle x(t)\in U}转存失败重新上传取消 转存失败重新上传取消
转存失败重新上传取消
假设函数f有一个零点:f(a) = 0,则常数函数:x = a是动力系统的驻定解(或称平衡解)。称a是动力系统的平衡点。
- 称点a李雅普诺夫稳定(简称稳定),如果对每个{\displaystyle \epsilon >0}转存失败重新上传取消
,均存在{\displaystyle \delta =\delta (\epsilon )>0}
转存失败重新上传取消,使得对所有满足{\displaystyle \|x_{0}-a\|<\delta }
转存失败重新上传取消的{\displaystyle x_{0}}
转存失败重新上传取消转存失败重新上传取消,就有{\displaystyle \|x(t)-a\|<\epsilon }
转存失败重新上传取消。
- 称点a渐近稳定,如果点a李雅普诺夫稳定,且存在{\displaystyle \delta >0}转存失败重新上传取消
,使得对所有满足 {\displaystyle \|x_{0}-a\|<\delta }
转存失败重新上传取消转存失败重新上传取消转存失败重新上传取消。
- 称点a指数稳定,如果点a渐近稳定,且存在 {\displaystyle \alpha ,\beta ,\delta >0}转存失败重新上传取消
使得对所有满足{\displaystyle \|x_{0}-a\|<\delta }
转存失败重新上传取消转存失败重新上传取消转存失败重新上传取消转存失败重新上传取消。
它们的直观几何意义是:
- 平衡点为李雅普诺夫稳定的,表示若动力系统状态函数(微分方程的解函数)的初值“足够接近”平衡点,则它会永远维持在平衡点附近任意小的范围里(距平衡点的距离不超过任意选择的正实数 {\displaystyle \epsilon }转存失败重新上传取消
)。
- 渐近稳定的意思是,初值足够接近平衡点的状态函数,不但维持在平衡点附近,而且最后会收敛到平衡点。
- 指数稳定的意思是,状态函数不但最后会收敛到平衡点,且收敛速度不慢于某种指数递减的速度。
设有状态函数x,其初始取值为{\displaystyle x(t_{0})=x_{0}}转存失败重新上传取消 转存失败重新上传取消
转存失败重新上传取消
{\displaystyle \lim _{t\to \infty }\|y(t)-x(t)\|\longrightarrow 0.}转存失败重新上传取消

则称x的轨迹有(局部)吸引性(attractive)。若上述条件对所有y均成立,则称x有全局吸引性(globally attractive)。
如果x的轨迹有吸引性,并且稳定,则x渐近稳定。不过,x有吸引性不表示它的轨迹渐近稳定。
迭代系统下的定义[编辑]
离散时间系统下稳定性的定义和连续时间系统下的定义几乎相同。以下为其定义,不过使用的是较多数学书籍上使用的定义。
给定度量空间{\displaystyle (X,d)}转存失败重新上传取消 转存失败重新上传取消
转存失败重新上传取消 转存失败重新上传取消
转存失败重新上传取消 转存失败重新上传取消转存失败重新上传取消转存失败重新上传取消
转存失败重新上传取消转存失败重新上传取消转存失败重新上传取消 转存失败重新上传取消
转存失败重新上传取消
{\displaystyle \forall n\in \mathbb {N} ,\;\;d(f^{n}(x),f^{n}(a))<\epsilon .}转存失败重新上传取消

称点a渐近稳定,如果a是李雅普诺夫稳定的点,而且在稳定点集合的内部,即存在{\displaystyle \delta >0}转存失败重新上传取消转存失败重新上传取消转存失败重新上传取消
{\displaystyle \lim _{n\to \infty }d(f^{n}(x),f^{n}(a))=0}转存失败重新上传取消

李雅普诺夫稳定性理论[编辑]
对于微分方程解之稳定性的研究称为稳定性理论。而李雅普诺夫稳定性定理只提供了稳定性的充份条件。
李雅普诺夫稳定性第二定理[编辑]
考虑一个函数 V(x) : Rn → R 使得
- {\displaystyle V(x)\geq 0}转存失败重新上传取消
只有在 {\displaystyle x=0}
转存失败重新上传取消处等号成立(正定函数)
- {\displaystyle {\dot {V}}(x(t))<0}转存失败重新上传取消
(负定)
则V(x)称为李雅普诺夫候选函数(Lyapunov function candidate),且系统(依李雅普诺夫的观点)为渐近稳定。
上式中 {\displaystyle V(0)=0}转存失败重新上传取消 转存失败重新上传取消
转存失败重新上传取消 转存失败重新上传取消
转存失败重新上传取消
此种分析方式可类比为考虑一物理系统(如弹簧及质量的系统)及其中的能量。若系统能量随时间递减,且减少的能量不会恢复,而此系统最后一定会静止于某个特定的状态。最后的状态称为吸引子。不过针对一个物理系统,找到表达其精确能量的函数不一定容易,而且针对抽象数学系统、经济系统或生物系统,上述能量的概念又不一定适用。
利用李雅普诺夫的分析方式,可在不知道系统实际能量的情形下,证明系统的稳定性。不过前提是可以找到满足上述限制的李雅普诺夫函数。
例如考虑以下的系统
{\displaystyle {\dot {x}}=-x^{3}\,}转存失败重新上传取消

希望用李雅普诺夫函数来确认{\displaystyle x=0\,}转存失败重新上传取消
{\displaystyle V(x)=0.5x^{2}\,}转存失败重新上传取消

{\displaystyle V(x)}转存失败重新上传取消
{\displaystyle {\dot {V}}(x(t))={\partial V \over \partial x}(-x^{3})=-x^{4}\,}转存失败重新上传取消

为负定函数,因此上述系统在{\displaystyle x=0\,}转存失败重新上传取消
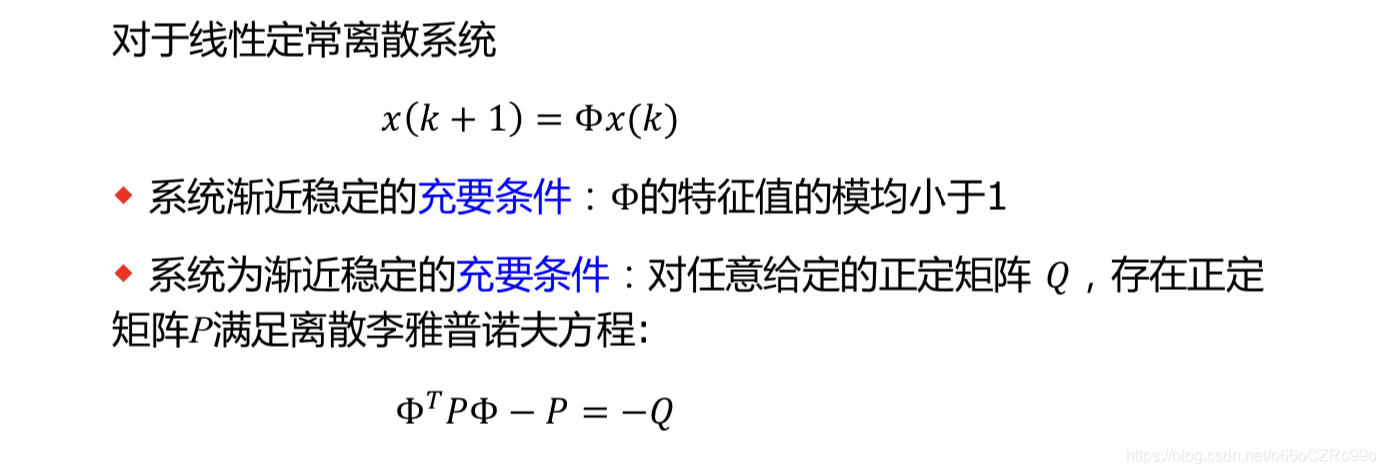
线性系统状态空间模型的稳定性[编辑]
一个线性的状态空间模型
{\displaystyle {\dot {\textbf {x}}}=A{\textbf {x}}}转存失败重新上传取消

为渐近稳定(其实是指数稳定),若
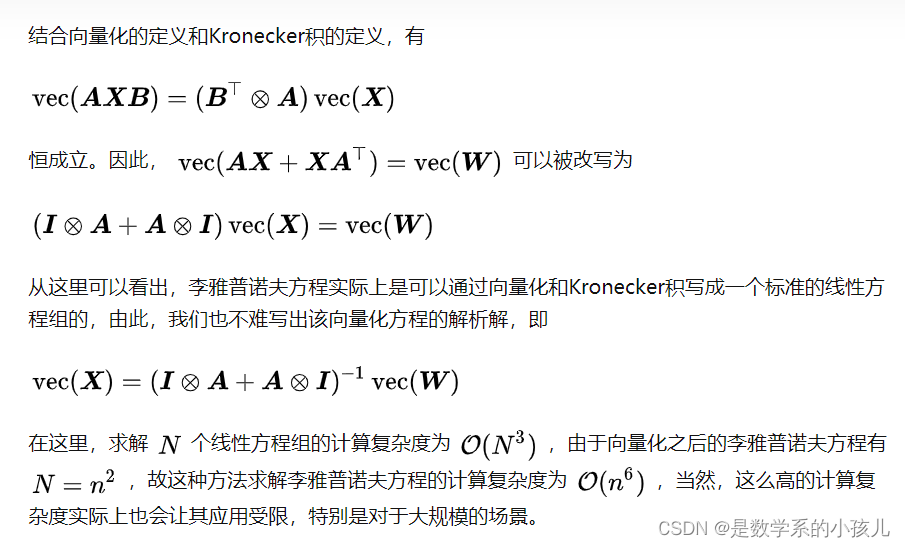
{\displaystyle A^{T}M+MA+N=0}转存失败重新上传取消

的解存在。
其中 {\displaystyle N=N^{T}>0}转存失败重新上传取消 转存失败重新上传取消
转存失败重新上传取消 转存失败重新上传取消
转存失败重新上传取消
有输入值系统的稳定性[编辑]
一个有输入(或受控制)的系统可以下式表示
{\displaystyle {\dot {\textbf {x}}}={\textbf {f(x,u)}}}转存失败重新上传取消

其中输入 u(t) 可视为控制、外部输入、扰动、刺激或外力。这种系统的研究是控制理论研究的主题之一,也应用在控制工程中。
对于有输入的系统,需量化输入对系统稳定性的影响。在线性系统中会用BIBO稳定性来作分析的工具,在非线性系统中则会使用输入-状态稳定性。