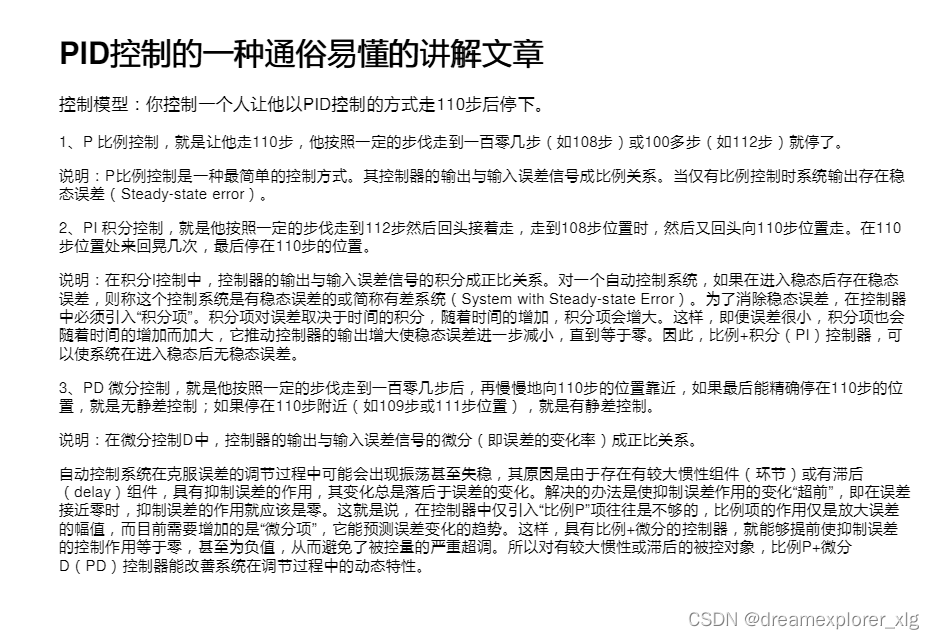
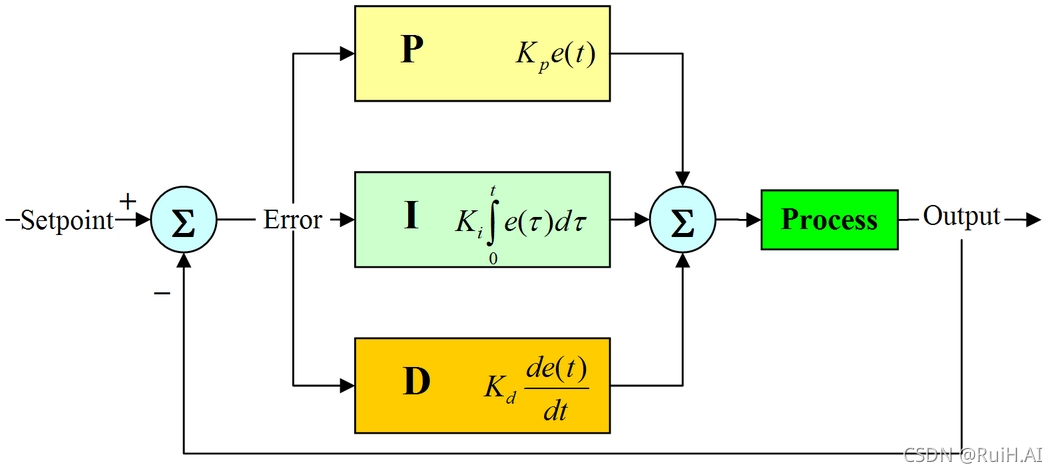
模拟式PID
其中,t为采样时间
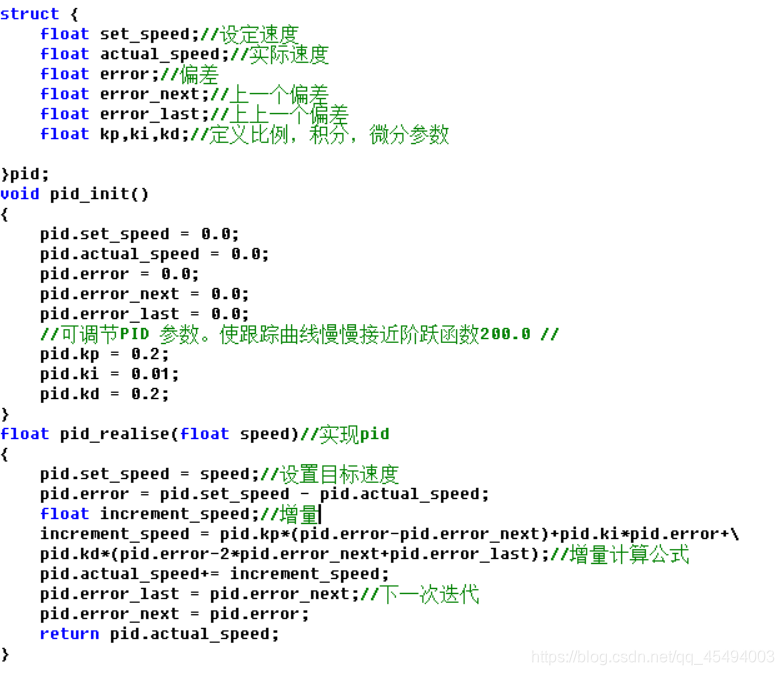
位置式PID
其中,为采样间隔
增量式PID
增量式PID和位置式PID都是数字式PID(模拟式PID的离散化)的不同表达形式,因为计算机只能处理离散数据,将连续信号变为离散信号,采样某一时刻。
其中,t为采样时间
其中,为采样间隔
增量式PID和位置式PID都是数字式PID(模拟式PID的离散化)的不同表达形式,因为计算机只能处理离散数据,将连续信号变为离散信号,采样某一时刻。