title:控制策略
date:2020-3-22
author:Page
categories:
-控制策略
tages:
-控制
比例积分微分控制,简称PID控制
因为以下优点被人们广泛使用于各个领域
a. 技术成熟
b. 易被人们熟悉和掌握
c. 不需要建立数学模型
d. 控制效果好
e. 鲁棒性
通常依据控制器输出与执行机构的对应关系,将基本数字PID算法分为位置式PID和增量式PID两种。
位置离散PID公式:Pwm=Kpe (k) +KiZe(k) +Kd[e(k)-e(k-1) ]
e(k):本次偏差.
e(k-1): 上一次的偏差.
Σe(k): e(k) 以及之前的偏差的累积和;其中k为1,2,…, k.
Pwm代表输出.
增量式离散PID公式:
ΔPwm=Kp[e(k)-e(k-1)]+Ki*e(k) +Kd[e(k)- -2e(k-1)+e(k-2) ]
e(k):本次偏差.
e(k-1): 上一次的偏差.
e(k-2): 上上次的偏差.
ΔPwm代表增量输出.
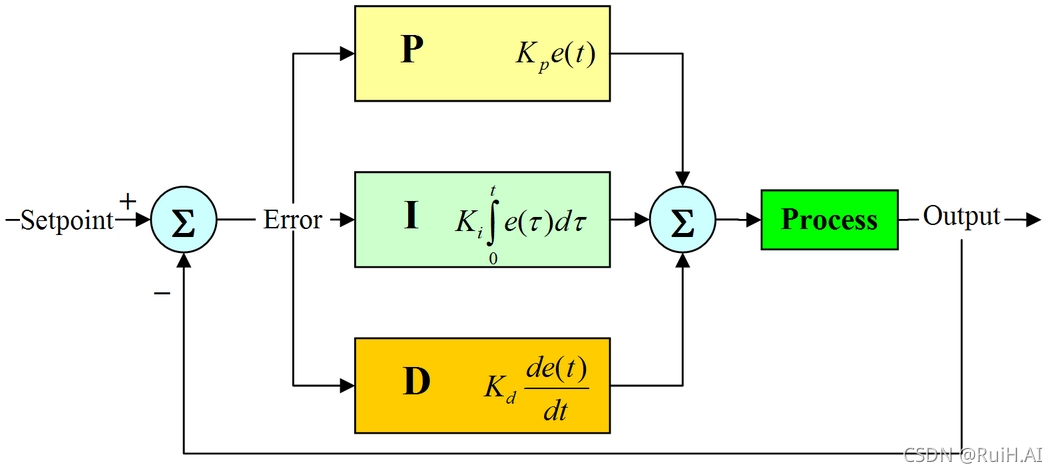
比例环节:偏差一旦产生,控制器立即产生控制作用以减小误差。当偏差e=0时,控制作用也为0。因此,比例控制是基于偏差进行调节的,即有差调节。
积分环节:能对误差进行记忆,主要用于消除静差,提高系统的无差度,积分作用的强弱取决于积分时间常数Ti,Ti越大,积分作用越弱,反之则越强。
微分环节:能反映偏差信号的变化趋势(变化速率),并能在偏差信号值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间。
从时间的角度讲,比例作用是针对系统当前误差进行控制,积分作用则针对系统误差的历史,而微分作用则反映了系统误差的变化趋势,这三者的组合是“过去、现在、未来”的完美结合.
下面将用输出波形图来细说PID:
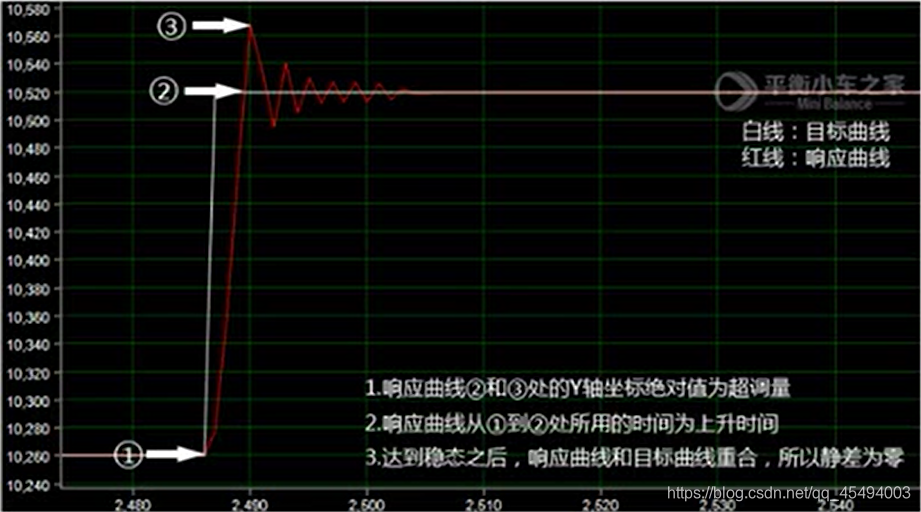
●最大超调量是响应曲线的最大峰值与稳态值的差,是评估系统稳定性的-一个重要指标;
●上升时间是指响应曲线从原始工作状态出发,第一次到达输出稳态值所需的时间,是评估系.统快速性的一一个重要指标;
●静差是被控量的稳定值与给定值之差,- -般用于衡量系统的准确性.
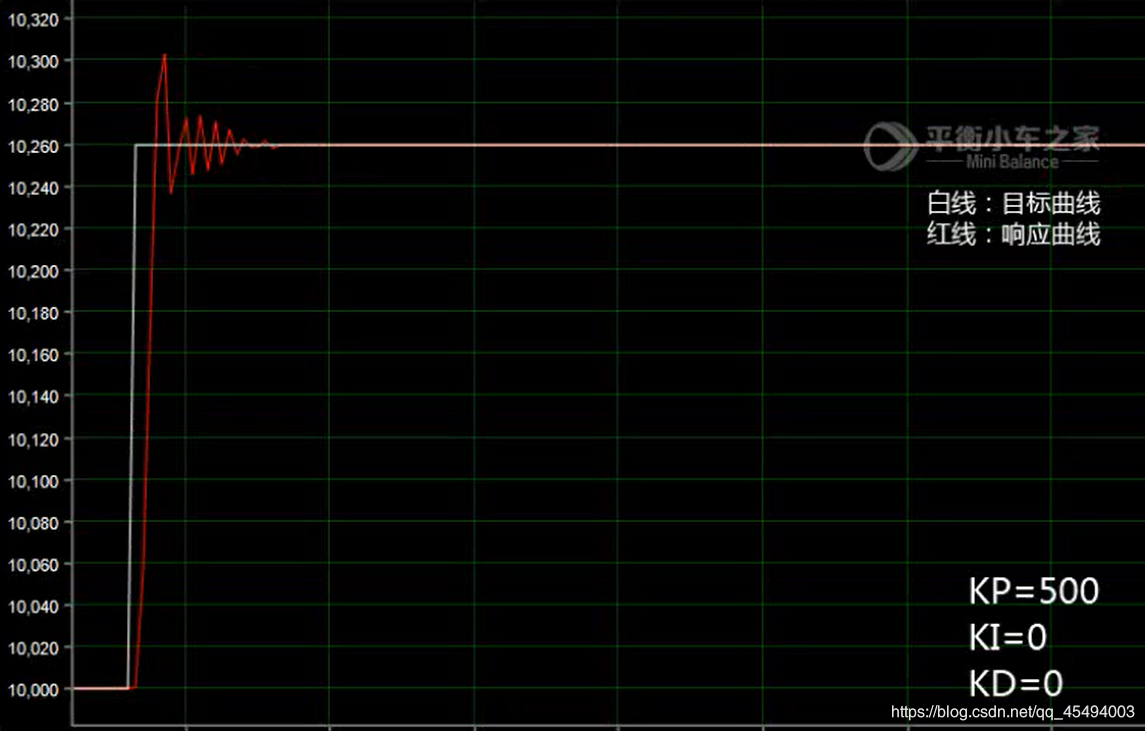
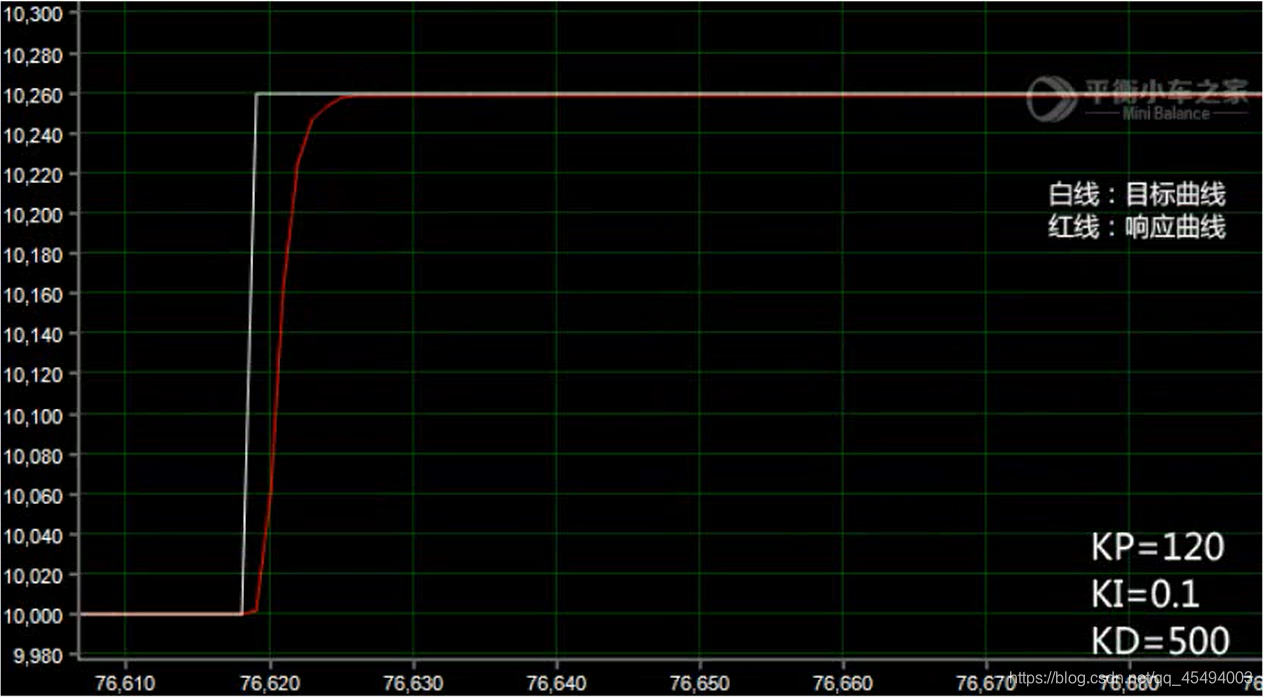
关于P、|、D三个参数的主要作用,可以大致又不完全地概况为:P用于提高响应速度、用于减小静差、D用于抑制震荡。
KP=50,KiI=0,KD=0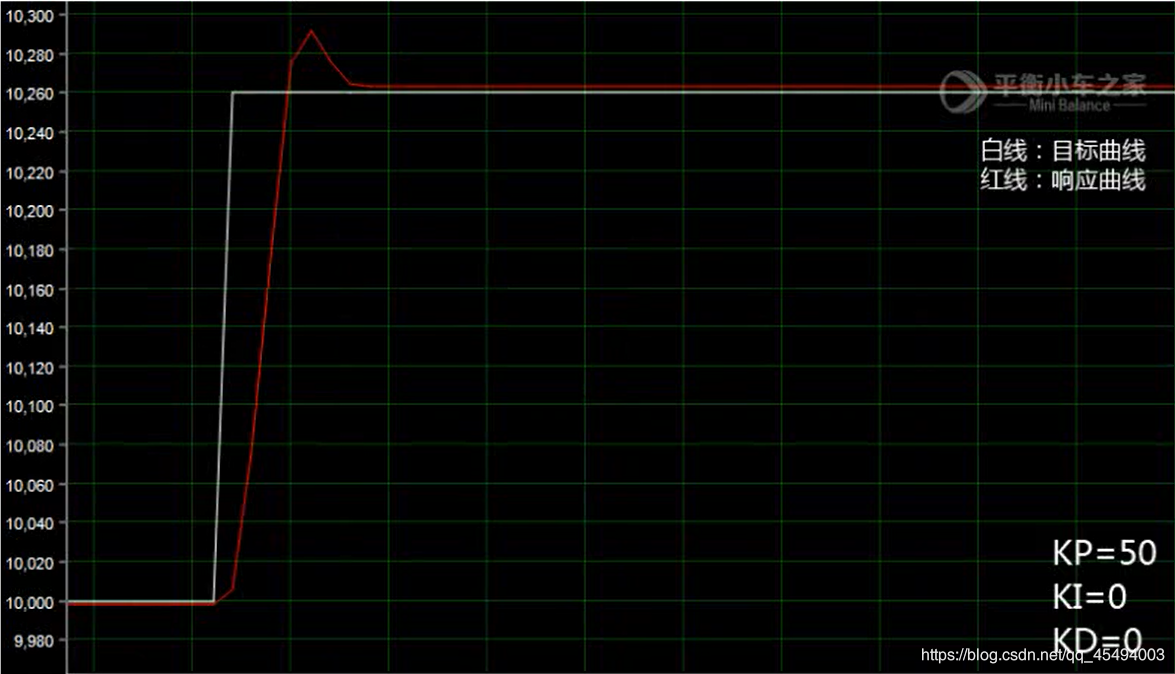
KP=500,KI=0,KD=0
KP=500,KI=0,KD=400

KP=120,KI=0.1,KD=500
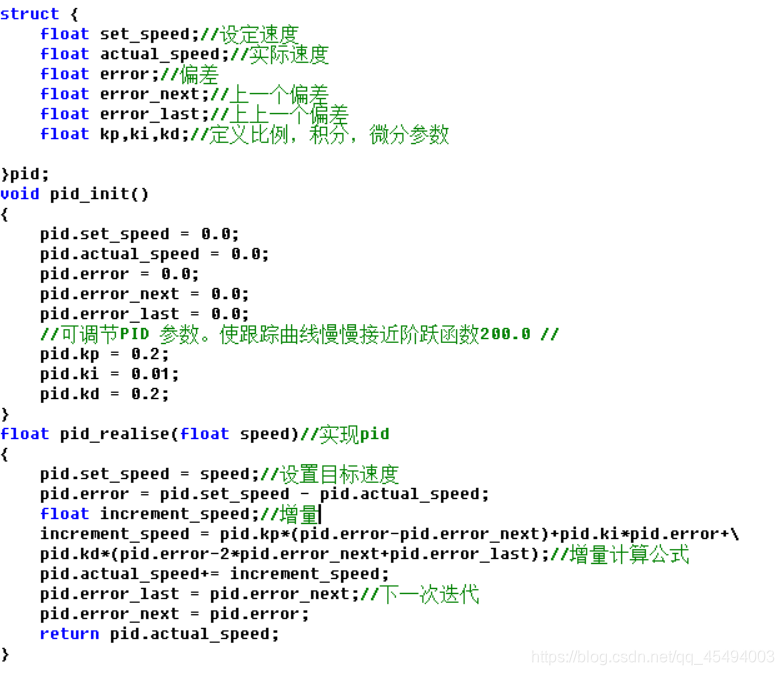
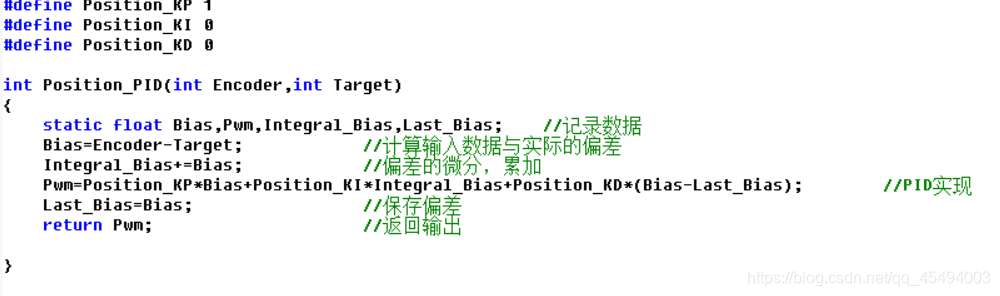
位置实现代码:
增量式PID: