关于决策树理论方面的介绍,李航的《统计机器学习》第五章有很好的讲解。
传统的ID3和C4.5一般用于分类问题,其中ID3使用信息增益进行特征选择,即递归的选择分类能力最强的特征对数据进行分割,C4.5唯一不同的是使用信息增益比进行特征选择。
特征A对训练数据D的信息增益g(D, A) = 集合D的经验熵H(D) - 特征A给定情况下D的经验条件熵H(D|A)
特征A对训练数据D的信息增益比r(D, A) = g(D, A) / H(D)
而CART(分类与回归)模型既可以用于分类、也可以用于回归,对于回归树(最小二乘回归树生成算法),需要寻找最优切分变量和最优切分点,对于分类树(CART生成算法),使用基尼指数选择最优特征。
参考自博客,一个使用rpart完成决策树分类的例子如下:
[plain] view plain copy 

- library(rpart);
- ## rpart.control对树进行一些设置
- ## xval是10折交叉验证
- ## minsplit是最小分支节点数,这里指大于等于20,那么该节点会继续分划下去,否则停止
- ## minbucket:叶子节点最小样本数
- ## maxdepth:树的深度
- ## cp全称为complexity parameter,指某个点的复杂度,对每一步拆分,模型的拟合优度必须提高的程度
- ct <- rpart.control(xval=10, minsplit=20, cp=0.1)
- ## kyphosis是rpart这个包自带的数据集
- ## na.action:缺失数据的处理办法,默认为删除因变量缺失的观测而保留自变量缺失的观测。
- ## method:树的末端数据类型选择相应的变量分割方法:
- ## 连续性method=“anova”,离散型method=“class”,计数型method=“poisson”,生存分析型method=“exp”
- ## parms用来设置三个参数:先验概率、损失矩阵、分类纯度的度量方法(gini和information)
- ## cost我觉得是损失矩阵,在剪枝的时候,叶子节点的加权误差与父节点的误差进行比较,考虑损失矩阵的时候,从将“减少-误差”调整为“减少-损失”
- fit <- rpart(Kyphosis~Age + Number + Start,
- data=kyphosis, method="class",control=ct,
- parms = list(prior = c(0.65,0.35), split = "information"));
- ## 第一种
- par(mfrow=c(1,3));
- plot(fit);
- text(fit,use.n=T,all=T,cex=0.9);
- ## 第二种,这种会更漂亮一些
- library(rpart.plot);
- rpart.plot(fit, branch=1, branch.type=2, type=1, extra=102,
- shadow.col="gray", box.col="green",
- border.col="blue", split.col="red",
- split.cex=1.2, main="Kyphosis决策树");
- ## rpart包提供了复杂度损失修剪的修剪方法,printcp会告诉分裂到每一层,cp是多少,平均相对误差是多少
- ## 交叉验证的估计误差(“xerror”列),以及标准误差(“xstd”列),平均相对误差=xerror±xstd
- printcp(fit);
- ## 通过上面的分析来确定cp的值
- ## 我们可以用下面的办法选择具有最小xerror的cp的办法:
- ## prune(fit, cp= fit$cptable[which.min(fit$cptable[,"xerror"]),"CP"])
- fit2 <- prune(fit, cp=0.01);
- rpart.plot(fit2, branch=1, branch.type=2, type=1, extra=102,
- shadow.col="gray", box.col="green",
- border.col="blue", split.col="red",
- split.cex=1.2, main="Kyphosis决策树");
效果图如下:
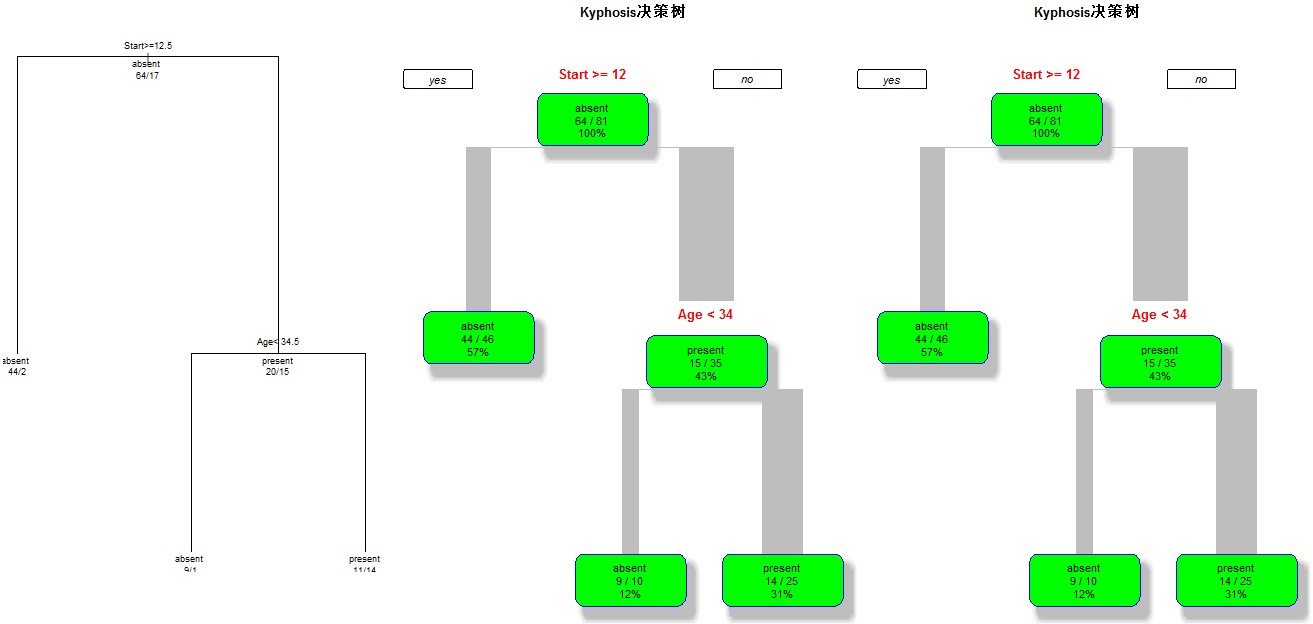
这是一篇相关的论文。