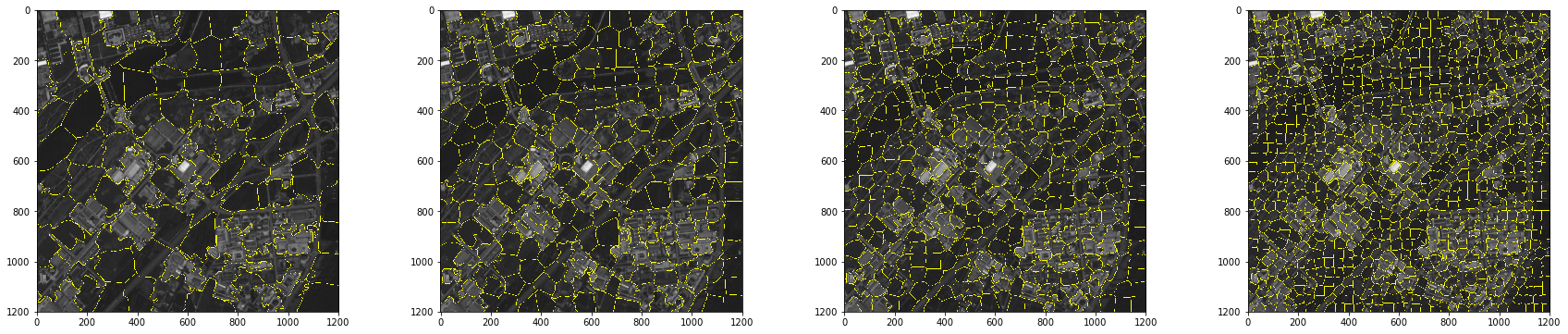
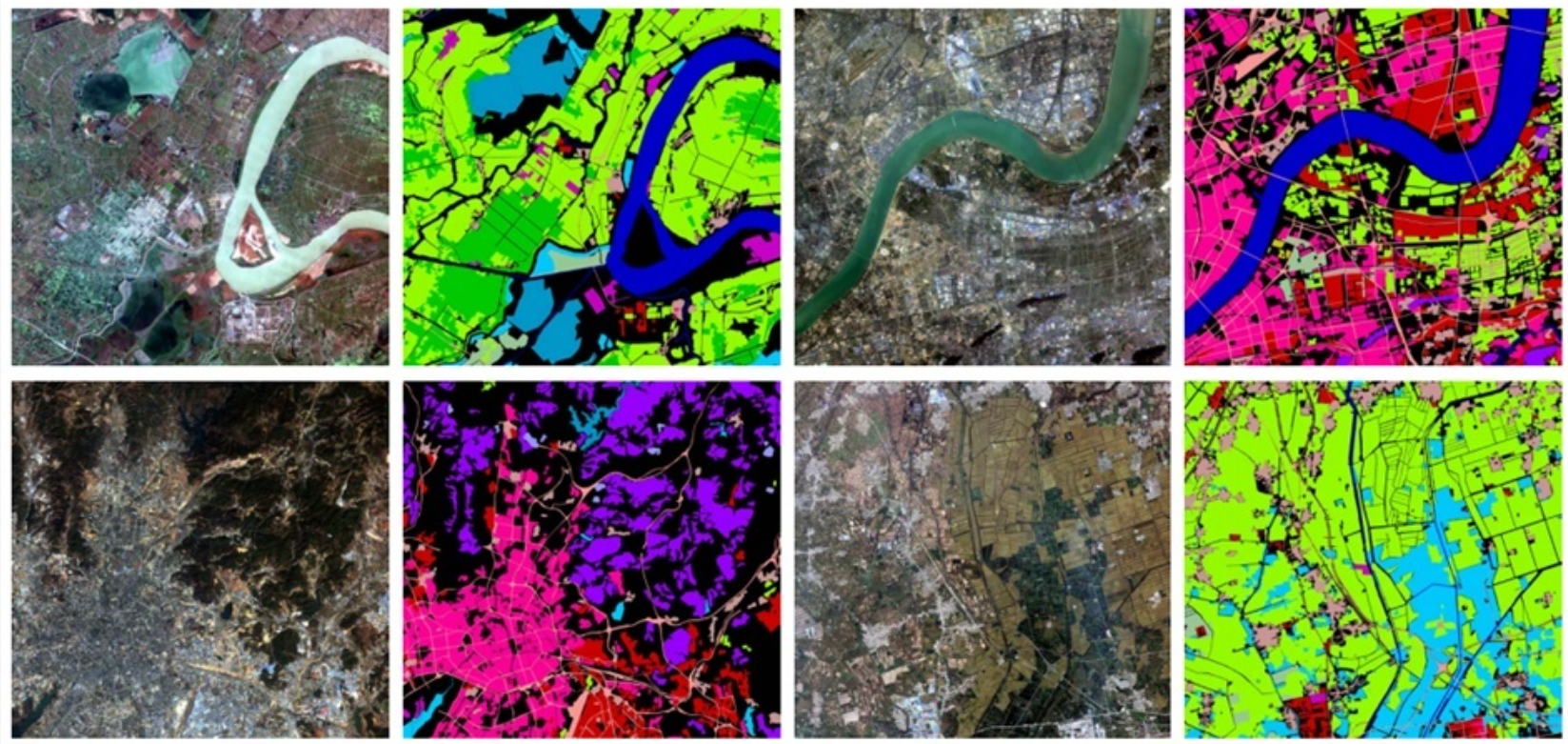
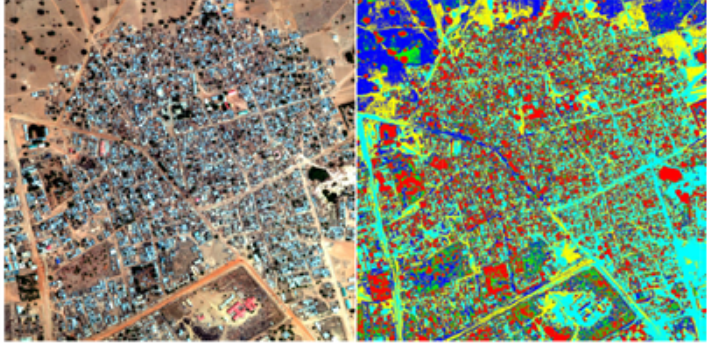
1.高分辨率遥感图像分割效果展示:

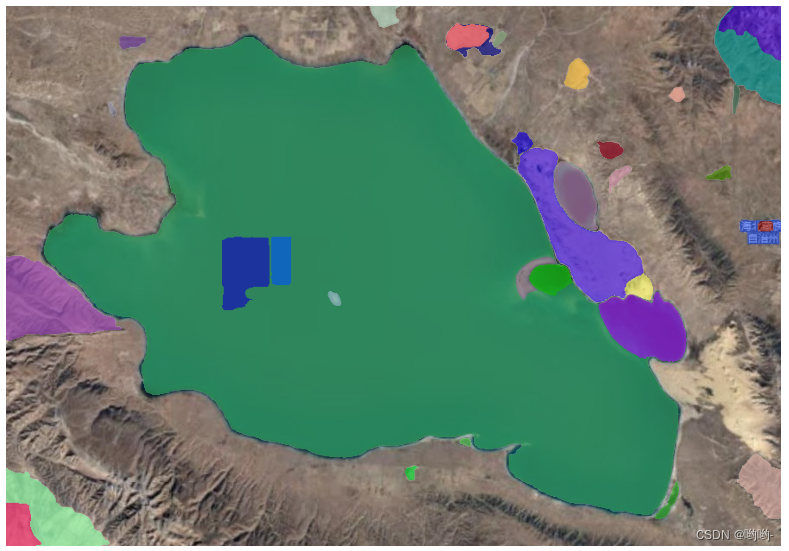
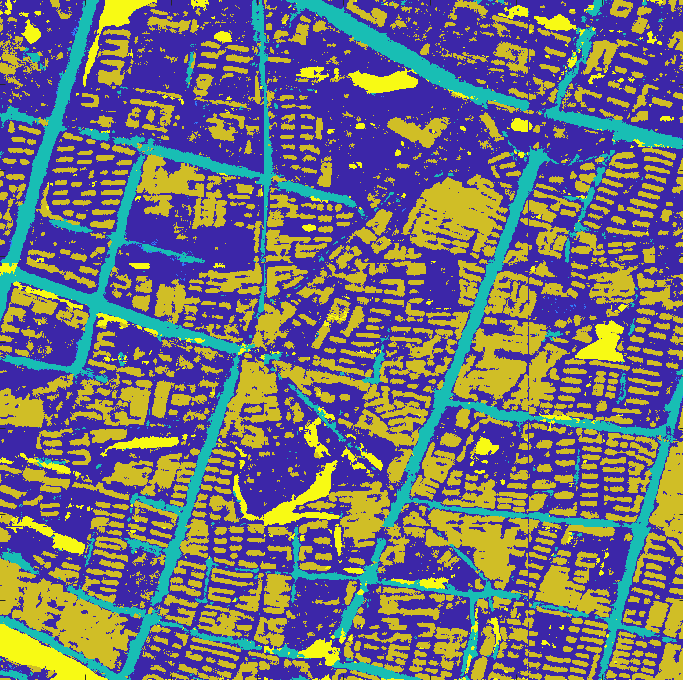
2.数据集简介:
首先介绍一下数据,我们这次采用的数据集是CCF大数据比赛提供的数据(2015年中国南方某城市的高清遥感图像),这是一个小数据集,里面包含了5张带标注的大尺寸RGB遥感图像(尺寸范围从3000×3000到6000×6000),里面一共标注了4类物体,植被(标记1)、建筑(标记2)、水体(标记3)、道路(标记4)以及其他(标记0)。其中,耕地、林地、草地均归为植被类,为了更好地观察标注情况,我们将其中三幅训练图片可视化如下:蓝色-水体,黄色-房屋,绿色-植被,棕色-马路。更多数据介绍可以参看这里。

3.相关知识
基于深度学习做视网膜血管分割任务有一些相关的知识点可能需要说明一下,如果你刚入门建议先了解清楚。如果需要的话,我会单独写篇文章介绍。相关知识主要有以下几点:
① 公开视网膜血管分割数据集。深度学习需要数据来驱动,发表文章需要和其他文献的方法对比,所以建议使用公开视网膜血管分割数据集。视网膜血管分割的公开集最常用的有DRIVE、STARE和CHASE_DB1这三个,还有HRF等等不常用的数据集。当然,医学图像分割领域内私有数据还是比较认可的,也可以使用。
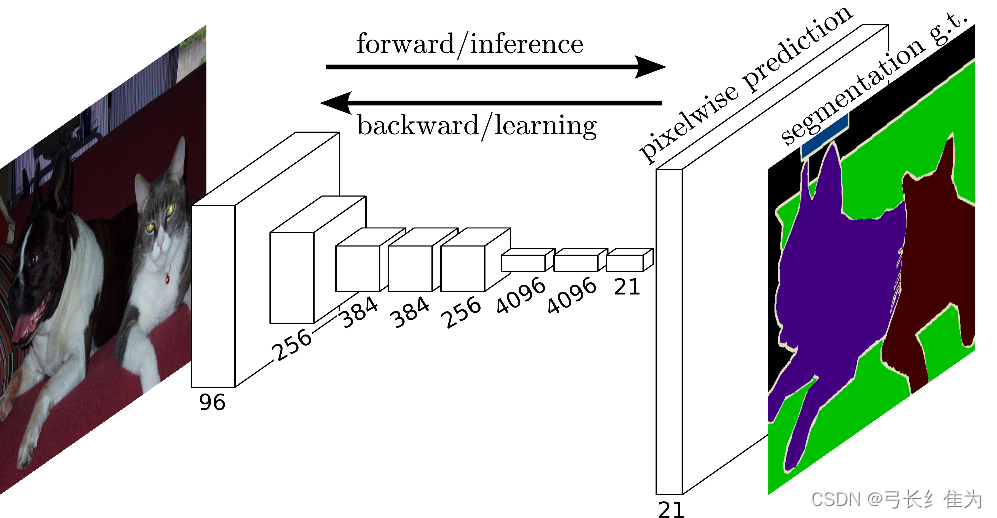
② 基于深度学习的图像语义分割。这方面需要掌握基本的深度学习理论知识、Python和Pytorch深度学习框架,以及语义分割相关的知识点,如FCN和评价指标等等。
③ 视网膜血管分割研究现状。这方面的工作现如今已完全深度学习化,深度学习方法的性能相比于血管跟踪、模板匹配、形态学处理这类传统方法要好很多,机器学习方法如今也逐渐被淘汰。
其他需要的也可以评论区指出。
现在说一说我们的数据处理的步骤。我们现在拥有的是5张大尺寸的遥感图像,我们不能直接把这些图像送入网络进行训练,因为内存承受不了而且他们的尺寸也各不相同。因此,我们首先将他们做随机切割,即随机生成x,y坐标,然后抠出该坐标下256*256的小图,并做以下数据增强操作:
1.原图和label图都需要旋转:90度,180度,270度
2.原图和label图都需要做沿y轴的镜像操作
3.原图做模糊操作
4.原图做光照调整操作
5.原图做增加噪声操作(高斯噪声,椒盐噪声)
这里我没有采用Keras自带的数据增广函数,而是自己使用opencv编写了相应的增强函数。
img_w = 256 img_h = 256 image_sets = ['1.png','2.png','3.png','4.png','5.png']defgamma_transform(img, gamma): gamma_table = [np.power(x / 255.0, gamma) * 255.0 forx inrange(256)] gamma_table = np.round(np.array(gamma_table)).astype(np.uint8) returncv2.LUT(img, gamma_table)defrandom_gamma_transform(img, gamma_vari): log_gamma_vari = np.log(gamma_vari) alpha = np.random.uniform(-log_gamma_vari, log_gamma_vari) gamma = np.exp(alpha) returngamma_transform(img, gamma) defrotate(xb,yb,angle): M_rotate = cv2.getRotationMatrix2D((img_w/2, img_h/2), angle, 1) xb = cv2.warpAffine(xb, M_rotate, (img_w, img_h)) yb = cv2.warpAffine(yb, M_rotate, (img_w, img_h)) returnxb,yb defblur(img): img = cv2.blur(img, (3, 3)); returnimgdefadd_noise(img): fori inrange(200): #添加点噪声temp_x = np.random.randint(0,img.shape[0]) temp_y = np.random.randint(0,img.shape[1]) img[temp_x][temp_y] = 255 returnimg defdata_augment(xb,yb): ifnp.random.random() < 0.25: xb,yb = rotate(xb,yb,90)ifnp.random.random() < 0.25: xb,yb = rotate(xb,yb,180)ifnp.random.random() < 0.25: xb,yb = rotate(xb,yb,270)ifnp.random.random() < 0.25: xb = cv2.flip(xb, 1)# flipcode > 0:沿y轴翻转yb = cv2.flip(yb, 1) ifnp.random.random() < 0.25: xb = random_gamma_transform(xb,1.0) ifnp.random.random() < 0.25: xb = blur(xb) ifnp.random.random() < 0.2: xb = add_noise(xb) returnxb,ybdefcreat_dataset(image_num = 100000, mode = 'original'): print('creating dataset...') image_each = image_num / len(image_sets) g_count = 0 fori intqdm(range(len(image_sets))): count = 0 src_img = cv2.imread('./data/src/'+ image_sets[i])# 3 channelslabel_img = cv2.imread('./data/label/'+ image_sets[i],cv2.IMREAD_GRAYSCALE)# single channelX_height,X_width,_ = src_img.shapewhilecount < image_each: random_width = random.randint(0, X_width - img_w - 1) random_height = random.randint(0, X_height - img_h - 1) src_roi = src_img[random_height: random_height + img_h, random_width: random_width + img_w,:] label_roi = label_img[random_height: random_height + img_h, random_width: random_width + img_w]ifmode == 'augment': src_roi,label_roi = data_augment(src_roi,label_roi) visualize = np.zeros((256,256)).astype(np.uint8) visualize = label_roi *50 cv2.imwrite(('./aug/train/visualize/%d.png'% g_count),visualize) cv2.imwrite(('./aug/train/src/%d.png'% g_count),src_roi) cv2.imwrite(('./aug/train/label/%d.png'% g_count),label_roi) count += 1 g_count += 14.环境配置
tensorflow-gpu2.3.0
numpy1.21.5
matplotlib==3.5.1
5. 创建数据集路径索引文件
项目根目录下的"./prepare_dataset"目录下有三个文件:drive.py,stare.py和chasedb1.py。分别将三个文件中的“data_root_path”参数赋值为上述3.2准备好的数据集的绝对路径(例如: data_root_path=“/home/lee/datasets”)。然后分别运行:
python ./prepare_dataset/drive.py
python ./prepare_dataset/stare.py
python ./prepare_dataset/chasedb1.py
即可在"./prepare_dataset/data_path_list"目录下对应的数据集文件夹中生成"train.txt"和"test.txt"文件,分别存储了用于训练和测试的数据路径(每行依次存储原图,标签和FOV路径(用空格隔开))。
6.训练模型
在根目录下的"config.py"文件中修改超参数以及其他配置信息。特别要注意 “train_data_path_list"和"test_data_path_list"这两个参数,分别指向3.3中创建的某一个数据集的"train.txt"和"text.txt"。 在"train.py"中构造创建好的模型(所有模型都在"./models"内手撕),例如指定UNet模型:
net = models.UNetFamily.U_Net(1,2).to(device) # line 103 in train.py
修改完成后,在项目根目录执行:
CUDA_VISIBLE_DEVICES=1 python train.py --save UNet_vessel_seg --batch_size 64
上述命令将在1号GPU上执行训练程序,训练结果保存在“ ./experiments/UNet_vessel_seg”文件夹中,batchsize取64,其余参数取config.py中的默认参数。
可以在config中配置培训信息,也可以用命令行修改配置参数。训练结果将保存到“ ./experiments”文件夹中的相应目录(保存目录的名称用参数"–save"指定)。
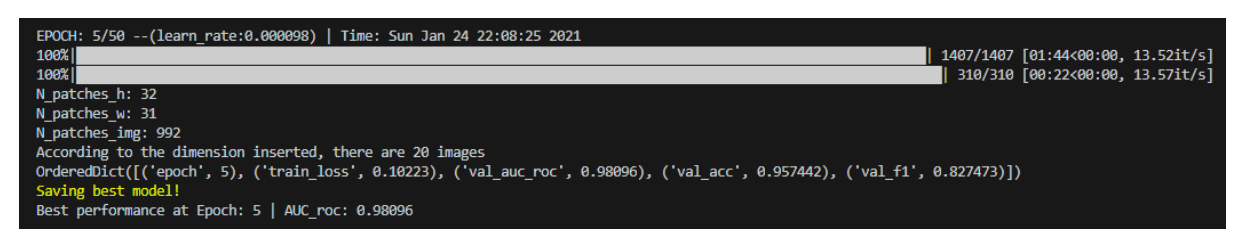
此外,需要注意一点,config文件中有个“val_on_test”参数。当其为真时表示会在训练的每个epoch结束后在测试集上进行性能评估,并选取"AUC of ROC"最高的模型保存为“best_model.pth”;当其为假时,会用验证集性能评估结果(AUC of ROC)保存模型。当然保存最佳模型依据的指标可以自行修改,默认为AUC of ROC。
7.测试评估
在“test.py”文件中构造对应的模型(同上),例如指定UNet模型:
net = models.UNetFamily.U_Net(1,2).to(device)
测试过程也需要"./config.py"中的相关参数,也可以在运行时通过命令行参数修改。
然后运行:
CUDA_VISIBLE_DEVICES=1 python test.py --save UNet_vessel_seg
上述命令将训练好的“./experiments /UNet_vessel_seg/best_model.pth”参数加载到相应的模型,并在测试集上进行性能测试,其测试性能指标结果保存在同一文件夹中的"performance.txt"中,同时会绘制相应的可视化结果。

8.系统整合:

9.完整源码&环境部署视频教程&数据集:
10.参考文献
[1]Hoover,A.,Kouznetsova,V.,Goldbaum,M.Locating blood vessels in retinal images by piecewise threshold probing of a matched filter response[].IEEE Trans Med Imag.2000
[2]Ying Sun.Automated identification of vessel contours in coronary arteriograms by an adaptive tracking algorithm[].IEEE Transactions on Microwave Theory and Techniques.1989
[3]Eckhorn R,Reitboeck H J,Arndt M,et al.Feature Linking via Synchronization among Distributed Assemblies:Simulation of Results from Cat Cortex[].Neural Computation.1990
[4]Chaudhuri S,Chatterjee S,Katz N,et al.Detection of bloodvessels in retinal images using two-dimensional matched filters[].IEEE Transactions on Medical Imaging.1989
[5]HOOVER A.Structured analysis of the retina. http://www.ces.clemson.edu/~ahoover/stare/ . 2000