1)一个点的最早/最晚时间是有公式或者技巧求出来的
2)一个活动的最晚开始几天不影响,或者一个活动可以耽搁的时间,是有公式计算的
3)关键路径为起点到终点权值加起来最大的路径
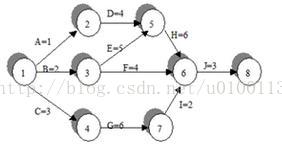
直接例题
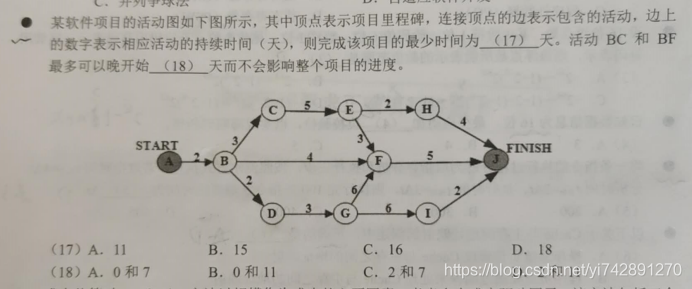
首先,关键路径为最大(大)的总值,计算可以得到ABCEFJ=18,所以关键路径的值为18
一、一个点的最早开始时间:从起点到该点的最长(大)的值
- A:起点,最早开始时间为0
- B:起点到B只有AB=2
- C:起点到C只有ABC=2+3=5
- D:起点到D只有ABD=2+2=4
- E:起点到E只有ABCE=2+3+5=10
- F:起点到F有ABCEF=13
ABF=6
ABDGF=13
取最大,其中ABCEF和ABDGF一样值,所以F的最早开始时间为13 - G:ABDG=7
- H:ABCEH=12
- I:ABDGI=13
- J:J有H,F,I 这3个点到J,其中ABCEHJ=12+4=16
0到F最大+<F,J>=13+5=18
0到I最大+<I,J>=13+2=15
取最大,所以J的最早开始时间为18
二、一个点的最晚开始时间:关键路径的值 - 终点到该点的最大的值
或者这样理解:关键路径的值 - 终点到该点的值,如果得到的有多个值,那么取最小
MIN { 关键路径的值 - 终点到该点的值 }
为了方便运算,求最晚的都是通过反方向来求的
- J:0
- H:重点到H只有JH,18-4=14
- F:18-5=13
- I:18-2=16
- E:有JFE=8
JHE=6
有最晚开始时间MIN{ 18-8=10,18-6=12 }=10 - G:有JFG=11
JIG=8
最晚开始时间 MIN{ 18-11=7,18-8=10}=7 - C:因为已经求出E了,可以更简单地运算
E的最晚开始时间 - <C,E>=10-5=5 - D:G的最晚开始时间 - < D,G>=7-3=4
- B:反方向回来的,有C和D两个点到B,则
BC的方向:C的最晚开始时间 - <B,C>=5-3=2
DB的方向:D的最晚开始时间 - <B,D>=4-2=2
所以B的最晚开始时间为2
三、活动的最长耽搁时间/最晚开始X天不影响整体=后继点的最晚-前驱点的最早-该活动的值
比如
- 活动BF最长耽搁时间=F的最晚-B的最早 - <B,F>=13-2-4=7
- 活动BC最长耽搁时间=C的最晚-B的最早 - <B,C>=5-2-3=0
其他的也一样,就不写了
四、活动最迟(晚)应该在第X天开始(出发):关键路径-前驱点到终点的最小值
或者说max{ 关键路径 - 前驱到终点的值}
活动GI最迟应该在第X天出发?
18-8=10,其中GIJ为 8 ,关键路径为18
GFJ为11,则18-11=7,10与7取最大,则活动GI最迟应该在10天出发
五、松弛时间
松弛时间=关键路径的总时间-包含该任务的关键路径花的时间
还有一种说法不知道对不对,松弛时间=前驱的最晚时间 - 前驱的最早时间