目录
项目的概念
项目估算
进度管理
练习题
风险管理
风险分析
练习题
项目的概念
项目定义的三层意思:
- 一定的资源约束:时间资源,经费资源,人力资源
- 一定的目标
- 一次性任务
里程碑
- 是项目中的重要时点或事件
- 持续时间为零,其代表的是一个时间点
项目估算
项目估算是制定项目开发计划的基础和依据。
成本估算
- 开发费用=人月数 * 每个人月的代价
- 开发费用=源代码行数 * 每行平均费用

典型的成本估算模型
★普特南(Putnam)
- 动态多变量模型
★CoCoMo模型
- 基本CoCoMo模型。静态单变量模型。
- 中级CoCoMo模型。静态多变量模型。
- 详细CoCoMo模型。将软件系统模型分为系统,子系统和模块3个层次。
进度管理

关键路径从开始到结束所有可能路径的时间最长的路径。时间最长的意味着这条路径完成了,项目也就完成了。关键路径决定了项目完成的最少周期。项目无论如何调整,完成的工期不会少于这条路径的天数。
松弛时间讲的是在不影响项目完成工期的前提下,某个事件或任务可以晚几天开始。这个时间称之为松弛时间。
松弛时间=关键路径的长度-通过这个任务的长度。
练习题
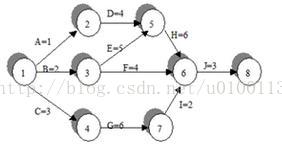
(1)下图是一个软件项目的活动图其中顶点表示项目里程碑,连接顶点的边表示包含的活动,则里程碑( )没有按时完成会影响整个项目的进度。若活动0+2完成后,停止3天才开始活动2+6,则完成整个项目的最少时间是( )天。

A. 1 B. 2 C. 3 D. 4
A. 53 B. 55 C. 56 D. 57
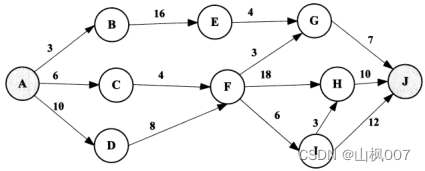
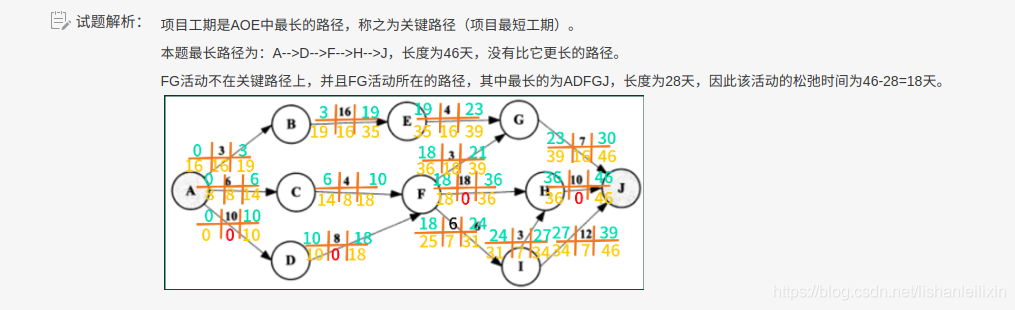
(2)下图是一个软件项目的活动图,其中顶点表示项目里程碑,连接顶点的边表示包含的活动,则里程碑( )在关键路径上。活动GH的松弛时间是( )。

A. B B. E C. C D. K
A. 0 B. 1 C. 2 D. 3
解析:
(1)把所有路径的横线上的日期加起来,时间最长的就是关键路径。路径02578花费的时间最长,因此里程碑2是影响整个项目进度的。答案C。关键路径02578的最长时间是55。0269的时间是53。由于0-2完成后,2-6延迟了3天开始,因此0269的完成时间是53+3=56。56比关键路径时间要长。由于工期的延误就导致了项目的关键路径由02578变更为0269。因此完成整个项目最少需要56天,答案C。
(2)按照上题相同方法。ABDIJL是关键路径。答案A。关键路径的长度是20,通过GH的路径是AEGHKL,其时间是17。因此松弛时间是20-17=3。答案D。
风险管理

风险分析
练习题
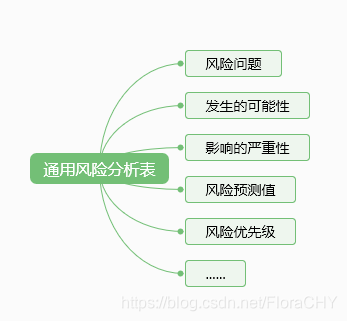
(1)通用的风险分析表应包括( )
➀风险问题 ➁发生的可能性 ➂影响的严重性 ➃风险预测值 ➄风险优先级
A. ➀➁➂➄ B. ➀➁➃➄ C. ➀➂➃➄ D. ➀➁➂➃➄
(2)风险分析在软件项目开发中具有重要作用,包括风险识别、风险预测、风险评估和风险控制等。“建立风险条目检查表”是 ( ) 时的活动,“描述风险的结果”是 ( ) 时的活动。
A.风险识别 B.风险预测 C.风险评估 D.风险控制
A.风险识别 B.风险预测 C.风险评估 D.风险控制
解析:
(1)答案D。
(2)答案AB。