PERT(Program/Project Evaluation and Review Technique)即计划评审技术,PERT是利用网络分析制定计划以及对计划予以评价的技术。
构造PERT图,需要明确四个概念:事件、活动、松弛时间和关键路线。
事件(Events)表示主要活动结束的那一点;
活动(Activities)表示从一个事件到另一个事件之间的过程;
松弛时间(slack time)不影响完工前提下可能被推迟完成的最大时间;
关键路线(Critical Path)是PERT网络中花费时间最长的事件和活动的序列。
1.关键路径:从开始到结束得所有路径中,所话时间最长的一条为关键路径。
注意:在关键路径上的任务的松弛时间为0
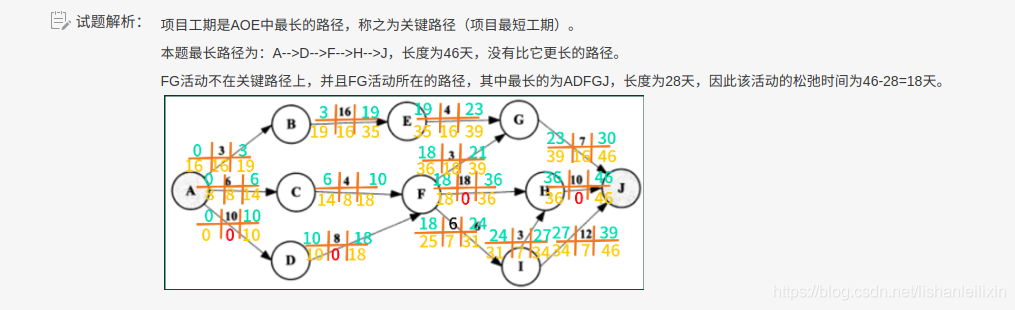
- 最早开始时间:在关键路径上,从开始到该任务的最早执行的时间如:FG最早开始时间为AD+DF(关键路径)=18
- 最晚开始时间:关键路径的总时间-反向得出该任务的时间如:下题:以FG为例 FG 3+GJ 7=10 总时间 46
- 得出最晚开始时间为 36
2.松弛时间(最多延迟执行的时间)
- 第一种求法:最晚开始时间-最早开始时间:如上所示:36-18 =18
- 第二种求法:关键路径的总时间-包含该任务的关键路径花的时间
- 2018看下半年第18题分析:
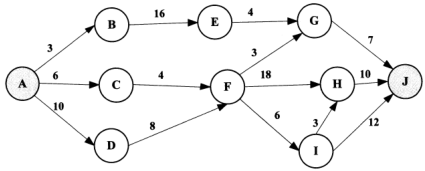
- 第18题:某软件项目的活动图如下图所示,其中顶点表示项目里程碑,连接顶点的边表示包
含的活动,边上的数字表示活动的持续时间(天),则完成该项目的最少时间为( )天。活
动FG的松驰时间为( )天。