甘特图也叫做进度管理图。
他是一种简单的水平条形图,它以日历为基准描述项目任务,水平轴表示日历时间线,每一个线条表示一个任务,任务名称垂直的列在左边列中,图中的线条的起点和终点对应水平轴上的时间,分别表示任务的开始时间和结束时间,线条的水平长度表示该任务的持续时间。同一时间短内有多个线条,表示这些任务是并发进行的。
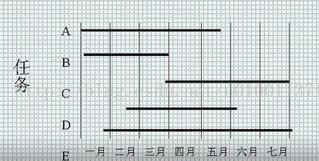
甘特图特点:能清晰的描述每个任务从何时开始,到何时结束,以及任务之间的并行关系。但是他不能清晰的反应出各任务的依赖关系。
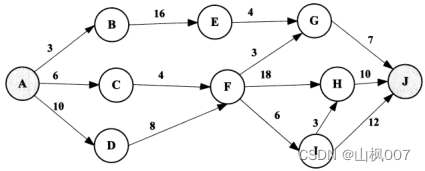
PERT图是一个有向图任务图,
图中剪头表示任务,它可以标上完成该任务的时间,途中的节点表示流入节点的任务的结束,并开始流出结点任务,这里把结点称为事件。只有当流入该结点的所有任务都结束时,结点所表示的 事件才出现。在PERT图中,最早时刻表示在此时刻之前从该事件出发的任务不可能开始,最迟时刻表示从该事件出发的任务必须在此时刻之前开始。松弛时间,表示在不影响整个工期的前提下,完成任务有多少机动余地。如图:
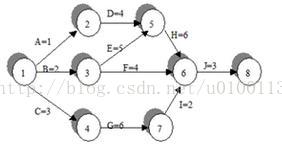
PERT图特点:不仅给出了每个任务的开始时间、结束时间和完成该任务所需的时间,还给出了任务之间的关系。
在PERT图中,关键路径是图中最长的一条路径。而松弛时间则反映了完成某些任务时可以推迟其开始时间或延长其所需完成的事件。但是PERT图不能反应任务之间的并行关系
计算方式:
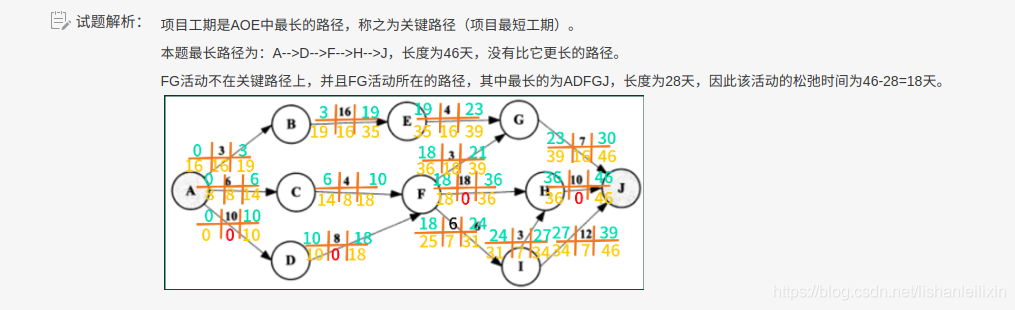
关键路径:从开始到结束得所有路径中,所花费时间最长的一条为有向路径;
松弛时间:关键路径时间-当前路径时间,即可以延迟该任务的开始时间而不影响关键路径准时走完花费的时间。
转载自:https://blog.csdn.net/u010011371/article/details/46272393