文章目录
- 一. 透视变换的原理
- 二. 透视变换实现
- ① 函数原型
- ② 透视变换实现
- 三. 透视变换的案例
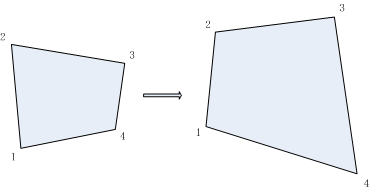
一. 透视变换的原理
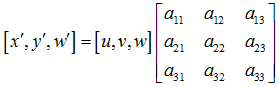
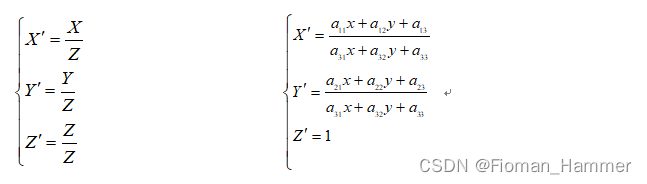
透视变换(Perspective Transformation)是将图片投影到一个新的视平面(Viewing Plance),也称为投影映射(Projective Mapping).通用的变换公式为:

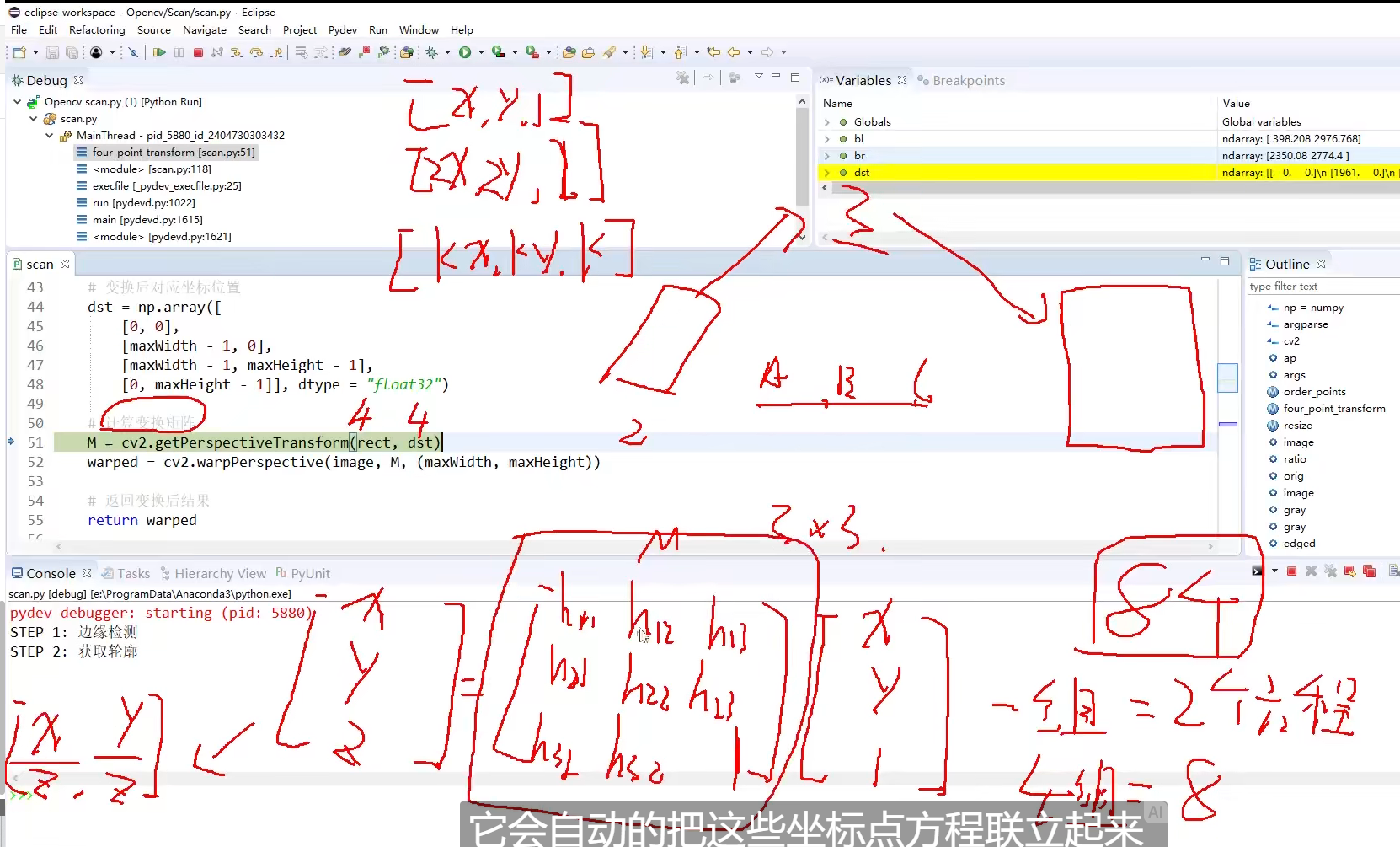
透视变换矩阵

(x,y,1)是原点, [X,Y,Z]是变换后的点位
这是一个二维空间变换到三维空间的转换,因为图像在二维平面,故除以Z

二. 透视变换实现
① 函数原型
Mat getPerspectiveTransform(const Point2f src[], const Point2f dst[], int solveMethod = DECOMP_LU);
参数说明:
src[]:原图像中的四个像素坐标dst[]:目标图像中的四个像素点坐标solveMethod:选择计算透视变换矩阵方法的标志,可以选择参数以及含义在下表中
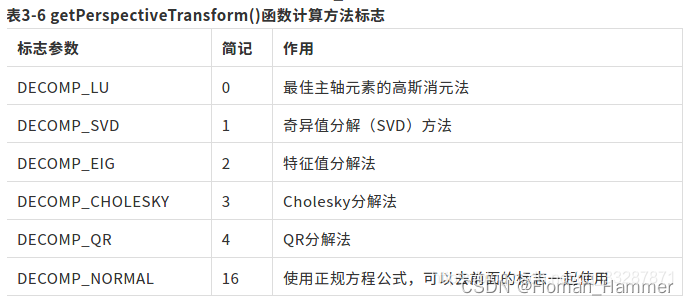
该函数两个输入量都是存放浮点坐标的数组,在生成数组的时候像素点的输入顺序没有要求,但是需要注意像素点的对应关系是一一对应的,函数的返回值是一个3*3的矩阵.最后一个参数是对应点坐标计算透视变换矩阵方法的选择标志,默认使用的是最佳主轴元素的高斯消元法DECOMP_LU
获取到透视变换矩阵以后,就可以进行透视变换了
void warpPerspective( InputArray src, OutputArray dst,InputArray M, Size dsize,int flags = INTER_LINEAR,int borderMode = BORDER_CONSTANT,const Scalar& borderValue = Scalar());
参数说明:
src:输入图像dst:输出图像M:3*3的变换矩阵dSize:输出图像的尺寸flags:插值方法标志boardMode:像素边界填充方式的标志boardValue:填充边界使用的数值,默认情况下是0
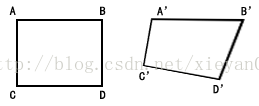
② 透视变换实现
#include"MyOpencv.h"
#include <vector>int main(void)
{Mat imageSrc = Mat::zeros(Size(800, 800), CV_8UC3);// 画一个多边形vector<Point> pts;pts.push_back(Point(50, 40));pts.push_back(Point(600, 40));pts.push_back(Point(600, 600));pts.push_back(Point(50, 600));polylines(imageSrc, pts, true, Scalar(0, 255, 0), 3, LINE_8);pts.clear();pts.push_back(Point(150, 80));pts.push_back(Point(350, 80));pts.push_back(Point(350, 200));pts.push_back(Point(150, 200));polylines(imageSrc, pts, true, Scalar(0, 0, 255), 3, LINE_8);Point2f srcPoint[4];Point2f dstPoint[4];srcPoint[0] = Point2f(150, 80);srcPoint[1] = Point2f(350, 80);srcPoint[2] = Point2f(350, 200);srcPoint[3] = Point2f(150, 200);dstPoint[0] = Point2f(150, 80);dstPoint[1] = Point2f(350, 80);dstPoint[2] = Point2f(400, 200);dstPoint[3] = Point2f(200, 200);Mat M = getPerspectiveTransform(srcPoint, dstPoint);Mat dst;warpPerspective(imageSrc, dst, M, Size(1000, 1000));imshow("Original", imageSrc);imshow("Dst", dst);waitKey(0);return 0;
}
结果:

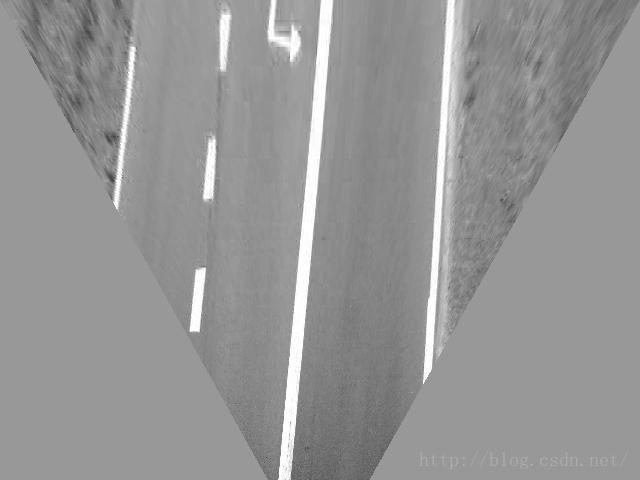
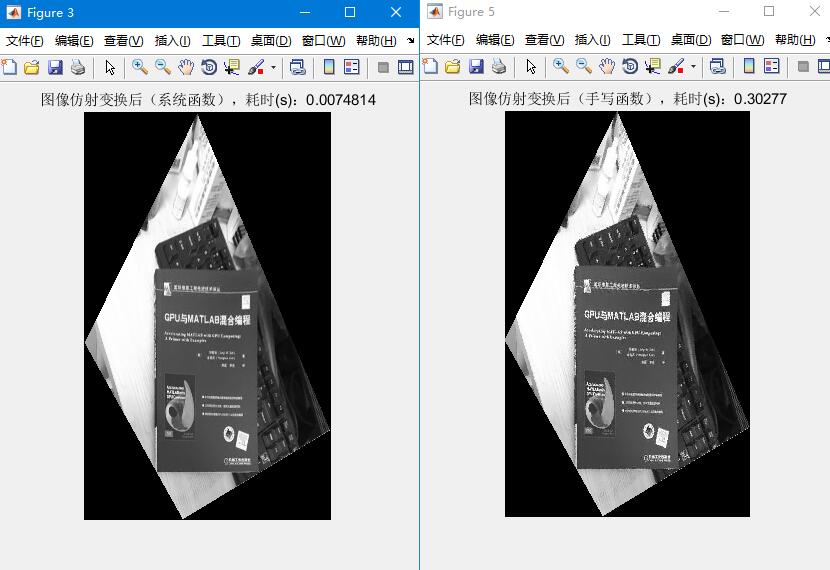
三. 透视变换的案例

将这张图像摆正.用到的技术.
- 灰度处理,二值化,形态学操作行程连通域
- 轮廓发现,将目标的轮廓绘制出来
- 在绘制的轮廓中进行直线检测
- 找出4个边,求出四个交点
- 使用透视变换函数,得到结果
#include "MyOpencv.h"
#include <vector>int main(void)
{Mat imageSrc = imread("./test_01.png", IMREAD_GRAYSCALE);imshow("Original", imageSrc);// 二值化Mat binary;threshold(imageSrc, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);imshow("Binary", binary);// 形态学 开操作,可以填充白色小区域Mat morphImage;Mat kernel = getStructuringElement(MORPH_RECT, Size(5, 5), Point(-1, -1));morphologyEx(binary, morphImage, MORPH_OPEN, kernel, Point(-1, -1), 3);imshow("Opened", morphImage);// 查找轮廓vector<vector<Point>> contours;vector<Vec4i> hireachy;findContours(morphImage, contours, hireachy, RETR_LIST, CHAIN_APPROX_SIMPLE);cout << "Contours.size: " << contours.size() << endl;// 轮廓绘制int width = imageSrc.cols;int height = imageSrc.rows;Mat drawImage = Mat::zeros(imageSrc.size(), CV_8UC3);for (int index = 0; index < contours.size(); index++){Rect rect = boundingRect(contours[index]);if (rect.width > width / 2 && rect.height > height / 2 && rect.width < width - 5 && rect.height < height - 5){drawContours(drawImage, contours, index, Scalar(0, 0, 255), 2, 8,hireachy, 0, Point(0, 0));}}imshow("Contours", drawImage);// 直线检测vector<Vec4i> lines;Mat contoursImage;int accu = static_cast<int>(min(width * 0.3, height * 0.3));cvtColor(drawImage, contoursImage, COLOR_BGR2GRAY);imshow("Contours", contoursImage);Mat linesImage = Mat::zeros(imageSrc.size(), CV_8UC3);HoughLinesP(contoursImage, lines, 1, CV_PI / 180.0,150,accu,accu);for (int index = 0; index < lines.size(); index++){Vec4i ln = lines[index];line(linesImage, Point(ln[0], ln[1]), Point(ln[2], ln[3]),Scalar(0, 0, 255), 2, 8, 0);}cout << "Number of lines: " << lines.size() << endl;imshow("ImageLines",linesImage);// 先确定上下左右四条直线,然后求交点Vec4i topLine, bottomLine, leftLine, rightLine;int yOffset;int xOffset;for (int i = 0; i < lines.size(); i++){Vec4i line = lines[i];yOffset = abs(line[3] - line[1]);xOffset = abs(line[0] - line[2]);// topLine and bottomLineif (yOffset < height * 0.2 ){if (line[1] < height / 2 && line[3] < height / 2){topLine = lines[i];}else{bottomLine = lines[i];}}// leftLine and rightLineif (xOffset < width * 0.2){if (line[0] < width / 2 && line[1] < width / 2){leftLine = lines[i];}else{rightLine = lines[i];}}}cout << "topLine : p1(x,y)= " << topLine[0] << "," << topLine[1] << "; p2(x,y)= " << topLine[2] << "," << topLine[3] << endl;cout << "bottomLine : p1(x,y)= " << bottomLine[0] << "," << bottomLine[1] << "; p2(x,y)= " << bottomLine[2] << "," << bottomLine[3] << endl;cout << "leftLine : p1(x,y)= " << leftLine[0] << "," << leftLine[1] << "; p2(x,y)= " << leftLine[2] << "," << leftLine[3] << endl;cout << "rightLine : p1(x,y)= " << rightLine[0] << "," << rightLine[1] << "; p2(x,y)= " << rightLine[2] << "," << rightLine[3] << endl;// 获取两条直线的交点Point leftTop, rightTop, rightBottom, leftBottom;float leftLineK, leftLineB, topLineK, topLineB, rightLineK, rightLineB, bottomLineK, bottomLineB;leftLineK = float(leftLine[3] - leftLine[1]) / float(leftLine[2] - leftLine[0]);leftLineB = leftLine[1] - leftLineK * leftLine[0];rightLineK = float(rightLine[3] - rightLine[1]) / float(rightLine[2] - rightLine[0]);rightLineB = rightLine[1] - rightLineK * rightLine[0];topLineK = float(topLine[3] - topLine[1]) / float(topLine[2] - topLine[0]);topLineB = topLine[1] - topLineK * topLine[0];bottomLineK = float(bottomLine[3] - bottomLine[1]) /float(bottomLine[2] - bottomLine[0]);bottomLineB = bottomLine[1] - bottomLineK * bottomLine[0];cout << "leftLineK = " << leftLineK << ", leftLineB = " << leftLineB << endl;cout << "rightLineK = " << rightLineK << ", rightLineB = " << rightLineB << endl;cout << "topLineK = " << topLineK << ", topLineB = " << topLineB << endl;cout << "bottomLineK = " << bottomLineK << ", bottomLineB = " << bottomLineB << endl;// 获取交点Point p1;p1.x = -static_cast<int>((leftLineB - topLineB) / (leftLineK - topLineK));p1.y = static_cast<int>(leftLineK * p1.x + leftLineB);Point p2;p2.x = -static_cast<int>((topLineB - rightLineB) / (topLineK - rightLineK));p2.y = static_cast<int>(topLineK * p2.x + topLineB);Point p3;p3.x = -static_cast<int>((rightLineB - bottomLineB) / (rightLineK - bottomLineK));p3.y = static_cast<int>(rightLineK * p3.x + rightLineB);Point p4;p4.x = -static_cast<int>((bottomLineB - leftLineB) / (bottomLineK - leftLineK));p4.y = static_cast<int>(bottomLineK * p4.x + bottomLineB);cout << "Point p1: (" << p1.x << "," << p1.y << ")" << endl;cout << "Point p2: (" << p2.x << "," << p2.y << ")" << endl;cout << "Point p3: (" << p3.x << "," << p3.y << ")" << endl;cout << "Point p4: (" << p4.x << "," << p4.y << ")" << endl;// 获取两点之间的距离'int newWidth, newHeight;newWidth = sqrt((p1.x - p2.x) * (p1.x - p2.x) + (p1.y - p2.y) * (p1.y - p2.y));newHeight = sqrt((p1.x - p4.x) * (p1.x - p4.x) + (p1.y - p4.y) * (p1.y - p4.y));cout << "newWidth = " << newWidth << ", newHeight = " << newHeight << endl;// 透视变换Point2f srcPts[4];Point2f dstPts[4];srcPts[0] = p1;srcPts[1] = p2;srcPts[2] = p3;srcPts[3] = p4;dstPts[0] = Point(0, 0);dstPts[1] = Point(newWidth, 0);dstPts[2] = Point(newWidth, newHeight);dstPts[3] = Point(0, newHeight);Mat M = getPerspectiveTransform(srcPts, dstPts, 0);Mat dst;warpPerspective(imageSrc, dst, M, Size(newWidth+5, newHeight+5), INTER_LINEAR);imshow("Dst", dst);waitKey(0);return 0;
}
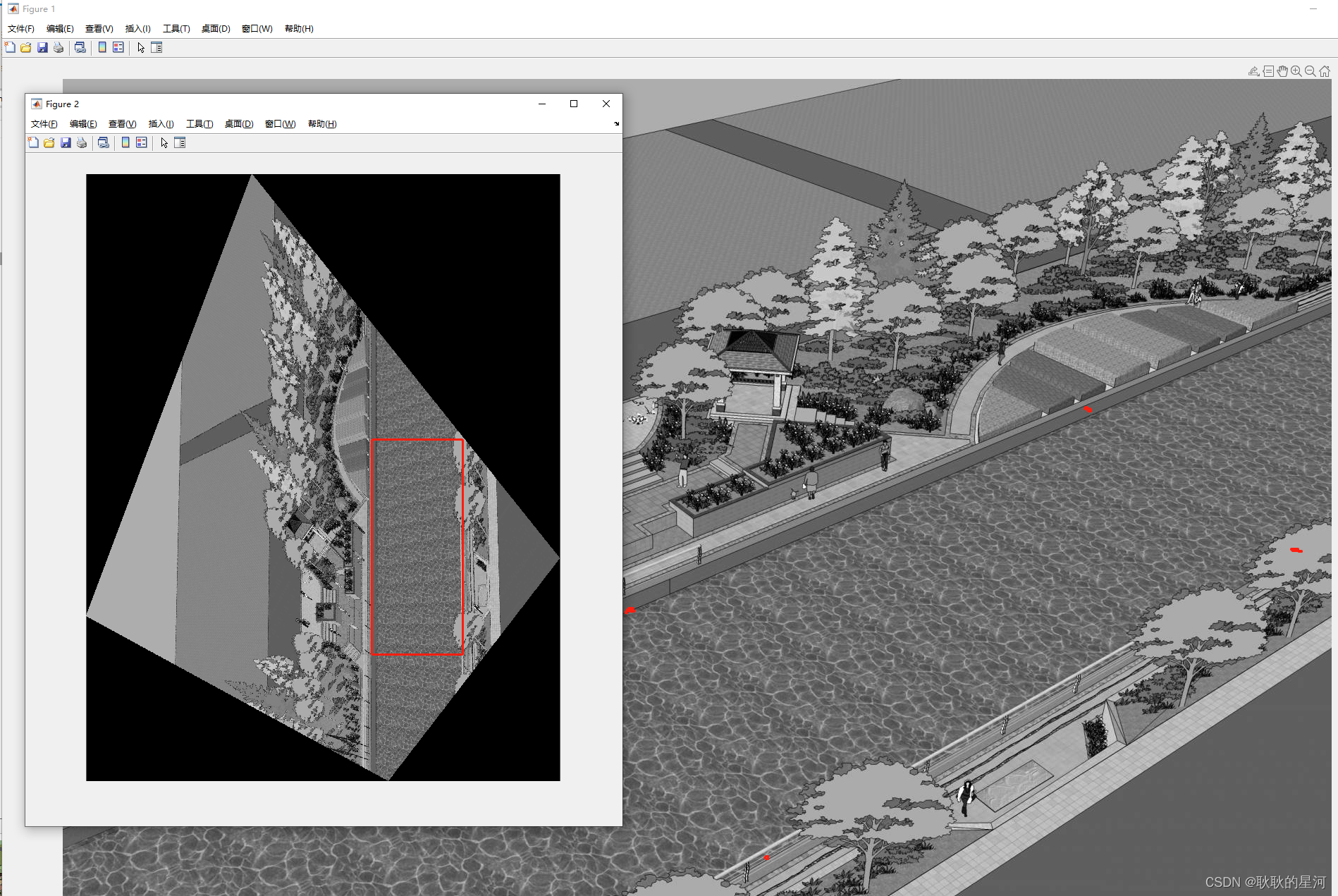
结果: