A*算法
A* 搜索算法,即A star search algorithm,简称A* 算法。 是一种在图形平面上对于多个节点的路径求出最低通过成本的算法。是对图的遍历和最佳优先搜索算法,也是对BFS的改进。其思想在于为每个状态建立启发函数,用启发函数制约搜索沿着最有效的方向行进。

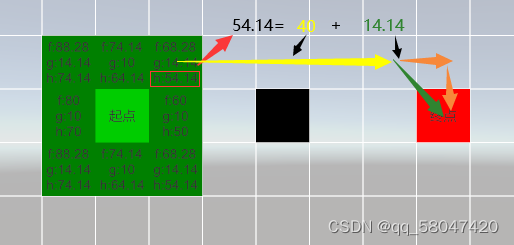
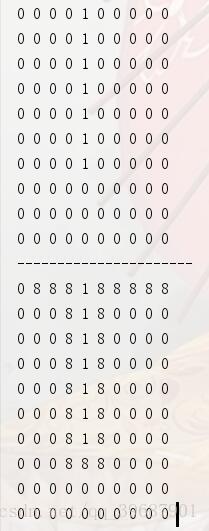
如图为八数码,求将左图变为右图需要的步骤。传统的BFS算法是将0四周的数与0交换,然后将其放入队列中,通过盲目地对有限的数据进行尝试最后求得答案,这样的时间复杂度较为复杂。而A*算法中通过加入启发函数对搜索的优先次序进行约束,以最快的方式得到答案。即 f ( n ) = g ( n ) + h ( n ) f(n) = g(n) + h(n) f(n)=g(n)+h(n),其中 g ( n ) g(n) g(n)为该状态的实际情况, h ( n ) h(n) h(n)为启发函数,而得到的 f ( n ) f(n) f(n)即是对状态的估价,用于安排搜索的优先顺序。在该图中, g ( n ) g(n) g(n)为此刻矩阵的状态, h ( n ) h(n) h(n)为此刻的矩阵与目标矩阵值不同的坐标的数量。
定理:
定义起点** s s s** ,终点** t t t** ,从起点(初始状态)开始的距离函数 g ( x ) g(x) g(x) ,到终点(最终状态)的距离函数 h ( x ) , h ∗ ( x ) h(x),h^{*}(x) h(x),h∗(x) ,以及每个点的估价函数 f ( x ) = g ( x ) + h ( x ) f(x) = g(x) + h(x) f(x)=g(x)+h(x)。
A*算法每次从优先队列中取出一个 ** f f f**最小的元素,然后更新相邻的状态。
如果 h ≤ h ∗ h \le h^* h≤h∗,则 A* 算法能找到最优解。
上述条件下,如果** h h h**满足三角形不等式,则 A*算法不会将重复结点加入队列。
当时 h = 0 h = 0 h=0,A*算法变为Dijkstra;当并且边权为时变为 BFS。
证明:
复杂度分析:
外循环中每次从open中取出点,共取n次,
内循环:遍历它的邻接点 n ( E ) n(E) n(E),并将这些邻接点放入open中,对open进行排序,open表大小是 O ( n ) O(n) O(n)量级的,若用快排就是 O ( n l o g n ) O(n~log~n) O(n log n),内循环总的复杂度为 O ( n ∗ l o g n + E ) = O ( n ∗ l o g n ) O(n*logn+E)=O(n*logn) O(n∗logn+E)=O(n∗logn)
总复杂度为 O ( n 2 ∗ l o g n ) O(n^2*logn) O(n2∗logn)
题目分析:
【八数码难题】
题目描述
在3×3的棋盘上,摆有八个棋子,每个棋子上标有1至8的某一数字。棋盘中留有一个空格,空格用0来表示。空格周围的棋子可以移到空格中。要求解的问题是:给出一种初始布局(初始状态)和目标布局(为了使题目简单,设目标状态为123804765),找到一种最少步骤的移动方法,实现从初始布局到目标布局的转变。
输入格式
输入初始状态,一行九个数字,空格用0表示
输出格式
只有一行,该行只有一个数字,表示从初始状态到目标状态需要的最少移动次数(测试数据中无特殊无法到达目标状态数据)
输入输出样例
输入 #1复制
283104765输出 #1复制
4
题目来源:https://www.luogu.com.cn/problem/P1379
试题解析:
首先,我们创建两个字符串,str_s用于读入起始状态,str_e用于存储目标状态,在样例中即为str_s=“283104765”,str_e=“123804765”。然后将起始状态读入。
创建a_star函数,利用STL中的unordered_map函数创建哈希表:unordered_map<string,int>dist(用于存储由起始状态到状态的变化次数)和unordered_map<string,bool>vis(用于表示该状态是否被访问过)。然后是优先队列priority_queue<pair<int,string>,vector<pair<int,string>,greater<pair<int,string>>>q,该优先队列用于存储每个点的估价函数,即 f ( n ) = g ( n ) + h ( n ) f(n) = g(n) + h(n) f(n)=g(n)+h(n),然后根据估价函数进行小根堆排序,估价距离目标状态最近的状态优先弹出。
不断访问并弹出队头元素,如果该状态已经被访问过,则取下一个元素,直到队头状态未被访问为止。将该状态标记为true,表示其已经被访问过。将字符串遍历一遍,找到0的位置,将其在二维数组中的坐标表示出来(当前下标/3为x,当前下标%3为y)。然后根据其二维坐标进行交换,分别上下左右四个坐标交换,如果交换之后的状态未曾出现或者可以更新为更短的距离,则更新,然后加入到队列中。
最后返回目标状态的dist即可。
#include<bits/stdc++.h>
using namespace std;string str_s, str_e = "123804765";//起始状态和目标状态int f(string start)//求该状态的估价函数
{int res = 0;for (int i = 0; i < 9; i++)if (start[i] != str_e[i])res++;return res;z
}int a_star(string start)
{int mx[4]{ 0,-1,0,1 }, my[4]{ -1,0,1,0 };//偏移数组,用于交换坐标点unordered_map<string, int>dist;//存储距离unordered_map<string, bool>vis;//标记该状态是否访问过priority_queue < pair<int, string>, vector<pair<int, string>>, greater<pair<int, string>>>q;//优先队列q.push({ f(start),start });//存入该状态的估价函数和状态while (!q.empty()){auto t = q.top();//取队头元素q.pop();if (t.second == str_e)break;//如果当前弹出的状态于目标状态一致时,则退出循环if (vis[t.second])continue;//如果该状态被访问过时,逃过本次循环string p = t.second;vis[p] = 1;int step = dist[p];int x, y;for (int i = 0; i < 9; i++)//遍历得到0的坐标if (p[i] == '0'){x = i / 3, y = i % 3;break;}for (int i = 0; i < 4; i++){int a = x + mx[i], b = y + my[i];if (a < 0 || a >= 3 || b < 0 || b >= 3)continue;//如果交换之后的坐标越界,则跳过本次操作swap(p[x * 3 + y], p[a * 3 + b]);//将两坐标交换if (!dist.count(p) || dist[p] > step + 1)//状态为存储或能更新为更小值{dist[p] = step + 1;//更新状态q.push({ dist[p] + f(p),p });//将状态加入优先队列中}swap(p[x * 3 + y], p[a * 3 + b]);//将状态复原}}return dist[str_e];//返回移动步骤次数
}int main()
{cin >> str_s;cout << a_star(str_s) << endl;return 0;
}