【由于专栏后几篇限制vip观看,我又把完整算法在公众号“武汉AI算法研习”进行了发布,可以查看全专栏文章。】
A-Star(A*)算法作为Dijkstra算法的扩展,在寻路和图的遍历过程中具有一定的高效性。
【适用范围】静态图搜索
【算法流程】A-Star算法中采用的估价函数如下,其中*h(i)的引入可以防止搜索过程中过渡跑偏到很多非常遥远的路径,但是这个h(i)*是未知的,计算中采用一个可以估计的值进行表达,一般用简单的曼哈顿距离
f ( i ) = g ( i ) + h ( i ) ; 当 前 节 点 的 价 值 估 值 f ( i ) = 起 始 点 到 该 节 点 的 距 离 g ( i ) + 当 前 节 点 距 离 终 点 的 距 离 h ( i ) ( 启 发 函 数 ) f(i) = g(i) + h(i);\\ 当前节点的价值估值f(i)=起始点到该节点的距离 g(i)+当前节点距离终点的距离h(i)(启发函数) f(i)=g(i)+h(i);当前节点的价值估值f(i)=起始点到该节点的距离g(i)+当前节点距离终点的距离h(i)(启发函数)
【搜索开始】如图方形格,绿色表示起点,红色表终点,其中蓝色为障碍物。路径必须以绿色格为起点绕过蓝色障碍物抵达红色格子。现有格子水平方向移动一格开销为10,沿对角线移动一格开销等于14。我们将路径规划过程中待检测的节点存放于Open List中,而已检测过的格子则存放于Close List中。

【第一步:以起点开始搜索周围8个格子】起点周围8个点是可能会经过的,所以把他们加入Open list中,同时指定其父节点为起始节点(32)。以起点格子右边方格为例,其距离起点距离为G=10,启发函数值采用曼哈顿距离则H=30,则价值函数F=G+H=40,以此类推得到其周围8个格子的价值函数,选取最小价值函数(33号节点)作为下一个目标。
O p e n l i s t = 21 ( 父 节 点 = 32 , f 值 = 74 ) , 22 ( 父 节 点 = 32 , f 值 = 60 ) , 23 ( 父 节 点 = 32 , f 值 = 54 ) , 31 ( 父 节 点 = 32 , f 值 = 60 ) , 33 ( 父 节 点 = 32 , f 值 = 40 ) , 41 ( 父 节 点 = 32 , f 值 = 74 ) , 42 ( 父 节 点 = 32 , f 值 = 60 ) , 43 ( 父 节 点 = 32 , f 值 = 54 ) C l o s t l i s t = 32 Open \ list={21(父节点=32,f值=74), \\ 22(父节点=32,f值=60),23(父节点=32,f值=54),\\31(父节点=32,f值=60),33(父节点=32,f值=40),\\41(父节点=32,f值=74),42(父节点=32,f值=60),43(父节点=32,f值=54)}\\ Clost \ list ={32} Open list=21(父节点=32,f值=74),22(父节点=32,f值=60),23(父节点=32,f值=54),31(父节点=32,f值=60),33(父节点=32,f值=40),41(父节点=32,f值=74),42(父节点=32,f值=60),43(父节点=32,f值=54)Clost list=32

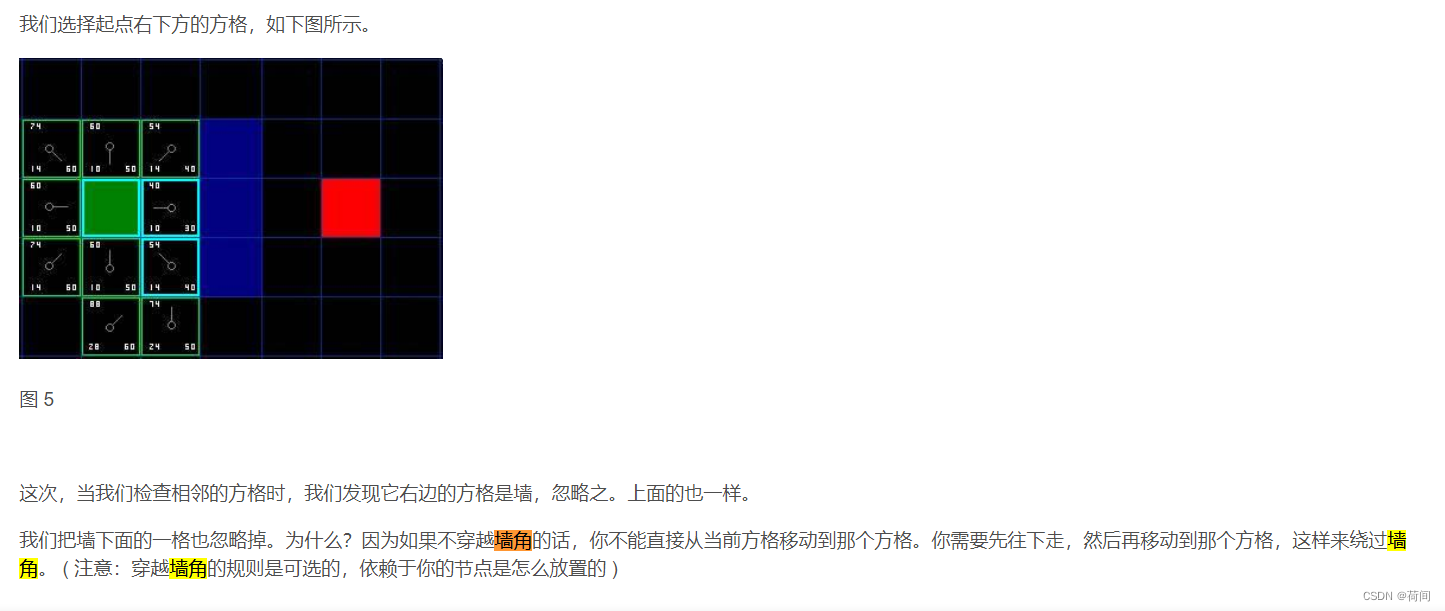
【第二步:以33号节点】对33号节点周围的8个节点进行判断,若是不可通过或是已经存在Clost list节点则忽略不考虑,若当前处理节点的相邻格子已经在Open List中,则检查这条路径是否更优,即计算经由当前处理节点到达那个方格是否具有更小的 G值。如果没有,不做任何操作。相反,如果G值更小,则把那个方格的父节点设为当前处理节点 ( 我们选中的方格 ) ,然后重新计算那个方格的 F 值和 G 值。
33号节点此时需要检查的点为23号、22号、42号和43号节点。23号节点目前G值14,如果经33号抵达则G值为20,因此不做更新;22号节点也无需更新,42号节点也无需更新,43号节点也无需更新。因此遍历Open list节点取f值最小的为43号节点,则加入Clost list中
O p e n l i s t = 21 ( 父 节 点 = 32 , f 值 = 74 ) , 22 ( 父 节 点 = 32 , f 值 = 60 ) , 23 ( 父 节 点 = 32 , f 值 = 54 ) , 31 ( 父 节 点 = 32 , f 值 = 60 ) , 41 ( 父 节 点 = 32 , f 值 = 74 ) , 42 ( 父 节 点 = 32 , f 值 = 60 ) , 43 ( 父 节 点 = 32 , f 值 = 54 ) C l o s t l i s t = 32 , 33 Open \ list={21(父节点=32,f值=74),22(父节点=32,f值=60),23(父节点=32,f值=54),\\31(父节点=32,f值=60),\\41(父节点=32,f值=74),42(父节点=32,f值=60),43(父节点=32,f值=54)}\\ Clost \ list ={32,33} Open list=21(父节点=32,f值=74),22(父节点=32,f值=60),23(父节点=32,f值=54),31(父节点=32,f值=60),41(父节点=32,f值=74),42(父节点=32,f值=60),43(父节点=32,f值=54)Clost list=32,33

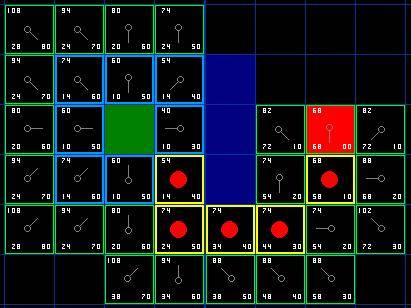
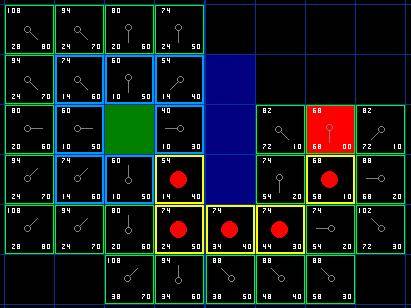
【第三步:以43号节点】以43号节点为中心,加入其周边可选节点并计算相应的G值和H值。则选择其中价值最小的节点为42号节点。
O p e n l i s t = 21 ( 父 节 点 = 32 , f 值 = 74 ) , 22 ( 父 节 点 = 32 , f 值 = 60 ) , 23 ( 父 节 点 = 32 , f 值 = 54 ) , 31 ( 父 节 点 = 32 , f 值 = 60 ) , 41 ( 父 节 点 = 32 , f 值 = 74 ) , 42 ( 父 节 点 = 32 , f 值 = 60 ) 52 ( 父 节 点 = 43 , f 值 = 88 ) , 53 ( 父 节 点 = 43 , f 值 = 74 ) C l o s t l i s t = 32 , 33 , 43 Open \ list={21(父节点=32,f值=74),22(父节点=32,f值=60),23(父节点=32,f值=54),\\31(父节点=32,f值=60),\\41(父节点=32,f值=74),42(父节点=32,f值=60)\\ 52(父节点=43,f值=88),53(父节点=43,f值=74)} \\ Clost \ list ={32,33,43} Open list=21(父节点=32,f值=74),22(父节点=32,f值=60),23(父节点=32,f值=54),31(父节点=32,f值=60),41(父节点=32,f值=74),42(父节点=32,f值=60)52(父节点=43,f值=88),53(父节点=43,f值=74)Clost list=32,33,43

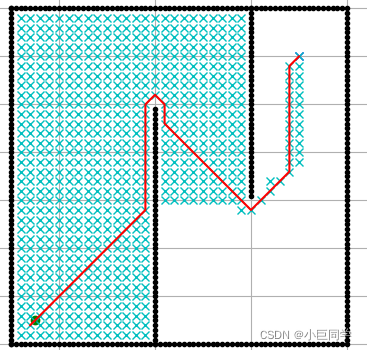
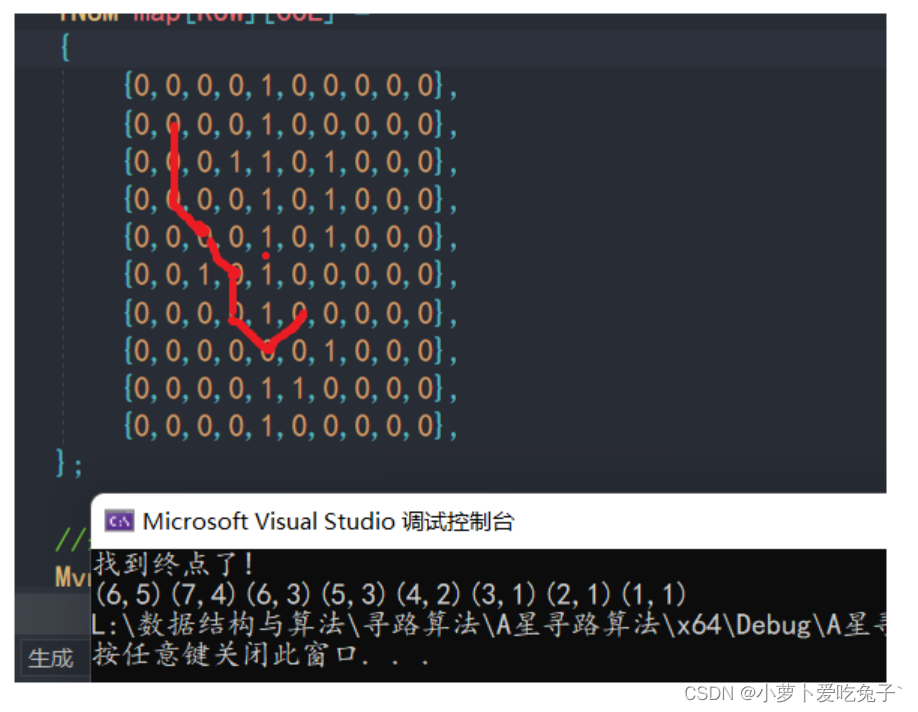
【不断重复以上操作,直到把终点加入到Open list中】最终沿着父节点从终点开始回溯到起点即时最短距离路径。


总结:A-Star最短路径距离算法通过引入启发式函数,每一步计算抵达起点和终点的估计距离从而可以更快、更省的得到最短路径,但是A-Star算法一般只能用于静态图中,对于动态图没次图形变换都需要用A-Star进行计算,计算开销很大。