首页
chatGPT知识
chatGPT问答
chatGPT百科
编程日记
003:枚举算法(习题)
article
/
2025/8/23 14:41:42
枚举算法:又称穷举法,它的思想是将所有可行的方法一一列举出来,看哪一种方法符合题目要求。也就是数学题中的鸡兔同笼问题,常见题目有百钱买百鸡,模糊数字,真假硬币,买公园门票,阿凡提的难题。
http://chatgpt.dhexx.cn/article/hZHekK2o.shtml
相关文章
枚举算法思想
枚举算法的思想 将问题的所有可能性一一列举,然后根据条件判断,保留合适的,舍弃不合适的。 枚举算法的基本解题思路 确定枚举对象,对象的取值范围,对象的条件。然后逐一枚举对象。 枚举算法流程图 枚举算法的优化 …
阅读更多...
枚举算法及其优化
引言: 总结一下这个简单的算法~ 一、什么是枚举算法: 枚举算法很简单,就是将问题的所有可能列举出来,然后通过筛选,找出解,它的时间复杂度通常很大,在一些题目中可能会TLE,因此重要的…
阅读更多...
算法之枚举
枚举 一、理解枚举类型 枚举类型是Java 5中新增特性的一部分,它是一种特殊的数据类型,之所以特殊是因为它既是一种类(class)类型却又比类类型多了些特殊的约束,但是这些约束的存在也造就了枚举类型的简洁性、安全性以及便捷性。下面先来看看…
阅读更多...
【算法】枚举算法
目录 算法详述 例题 A - 火柴棒等式 B - 砝码称重 输入格式 输出格式 算法详述 枚举:即对可能的解集合一一列举。 枚举算法的实现往往通过使用循环(嵌套)就能够轻易实现,所以并没有什么思维难度。 解题思路: …
阅读更多...
基础算法(一):枚举算法
前言 从这篇文章开始,小荔枝就开始学习算法和数据结构啦!!!我们先来看看入门的一些基础算法,在这篇文章中,主要介绍的是枚举算法。我们重点需要了解枚举算法使用时需要确定的条件,荔枝会用一道题…
阅读更多...
常用算法——枚举算法
在进行归纳推理时,如果逐个考察了某类事件的所有可能情况,因而得出一般结论,那么这结论是可靠的,这种归纳方法叫做枚举算法 一、基本概念和算法 枚举算法简称枚举法,也称为列举法、穷举法,是暴力策略的具体…
阅读更多...
枚举算法
一、枚举法的基本思想 枚举法又称穷举法。 基本思想是根据提出的问题枚举所有可能状态,并用问题给定的约束条件检验哪些状态是需要的,哪些状态是不需要的。 能使命题成立的状态,即为其解。 枚举结构:循环判断语句。 二、枚举…
阅读更多...
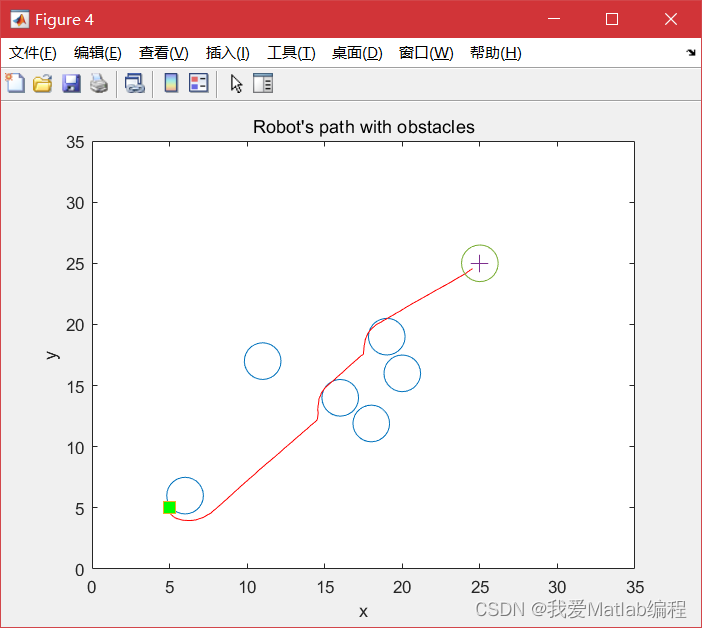
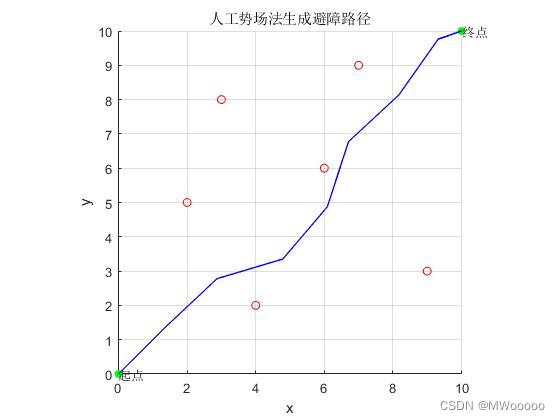
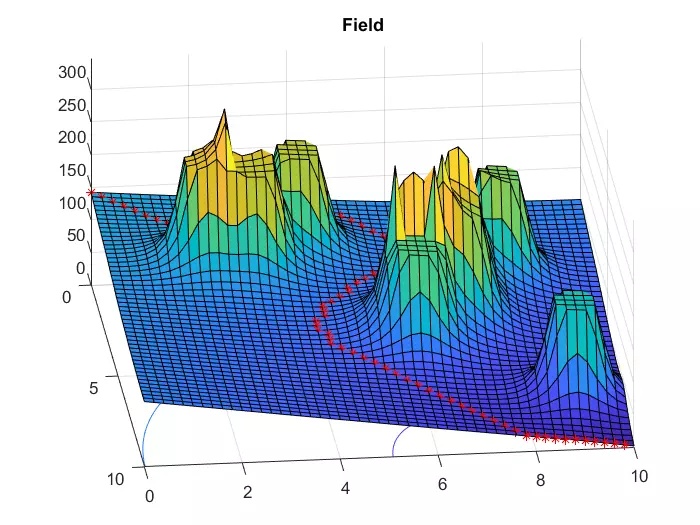
传统人工势场法---经典算法
网上代码很多,这个可以直接使用。 Xo[0 0];%起点位置 k50;%计算引力需要的增益系数 K0;%初始化 m15;%计算斥力的增益系数,都是自己设定的。 Po0.5;%障碍影响距离,当障碍和车的距离大于这个距离时,斥力为0,即不受该障碍…
阅读更多...
人工势场法(APF) —— Path Planning
版权声明:本文为博主原创博文,未经允许不得转载,若要转载,请说明出处并给出博文链接 维基百科说:“人工势场法(Artificial Potential Field, APF)是一种将机器人的外形视为势场中的一…
阅读更多...
基于人工势场法的移动机器人路径规划研究(Matlab代码实现)
目录 💥1 概述 📚2 运行结果 🎉3 参考文献 👨💻4 Matlab代码 💥1 概述 路径规划是移动机器人领域的热点研究方向,人工势场法已在工业机器人路径规划中得到广泛应用,近年来正逐…
阅读更多...
11(0)-AirSim+四旋翼仿真-人工势场法避障
1.基本原理 人工势场法的基本原理为,根据地图内障碍物、目标点等的分布,构造一个人工势场,无人机由势能较高的位置向势能较低的位置移动。就好比是一个电场,电场内不同位置的电势能不同,对带电物体产生的力也不同&…
阅读更多...
局部路径规划中的人工势场法
人工势场法是局部路径规划的一种比较常用的方法。这种方法假设机器人在一种虚拟力场下运动。 一、简介 如图所示,机器人在一个二维环境下运动,图中指出了机器人,障碍和目标之间的相对位置。 这个图比较清晰的说明了人工势场法的作用&#…
阅读更多...
matlab箭头梯度方向场,局部路径规划算法——人工势场法
人工势场法是由Khatib于1986年提出,其方法是将移动机器人所处的环境用势场来定义,通过位置信息来控制机器人的避障行驶,基本思想是构造目标位姿引力场和障碍物周围斥力场共同作用的人工势场,搜索势函数的下降方向来寻找无碰撞路径。人工势场法避障技术使得机器人的移动能很…
阅读更多...
基于人工势场法的车辆编队轨迹规划matlab仿真验证
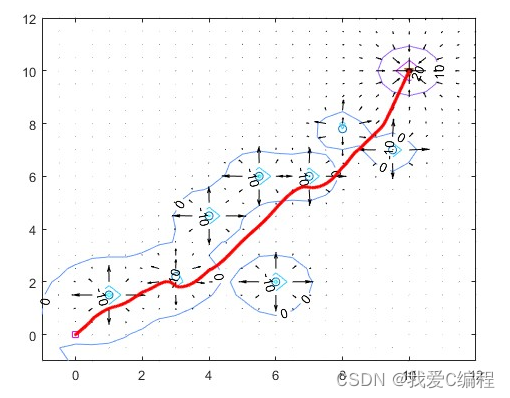
给出了完整的MATLAB代码仿真;基于人工势场法编队的基本原理:通过构建车辆相对目标点的引力势场和斥力势场构建车辆所处地图下的整体势场,设置如图所示的势场图, 图中圆心为我们参考的目标点,其可以提供引力方向&#x…
阅读更多...
基于人工势场法的二维平面内无人机的路径规划的matlab仿真,并通过对势场法改进避免了无人机陷入极值的问题
目录 1.算法描述 2.matlab算法仿真效果 3.MATLAB核心程序 4.完整MATLAB 1.算法描述 人工势场法原理是:首先构建一个人工虚拟势场,该势场由两部分组成,一部分是目标点对移动机器人产生的引力场,方向由机器人指向目标点…
阅读更多...
matlab人工势场法三维演示图,运动规划入门 | 5. 白话人工势场法,从原理到Matlab实现...
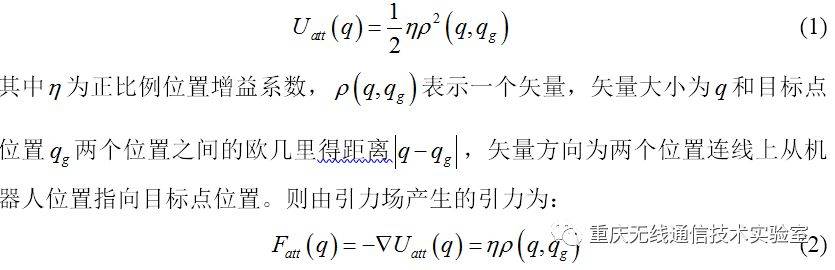
如何利用人工势场进行运动规划? 1.1 引力势场(Attractive Potential Field) 人工势场这个特殊的势场并不是一个单一的场,其实它是由两个场叠加组合而成的,一个是引力场,一个是斥力场。 顾名思义引力势场是具有吸引的性质,会将机器人从起点处朝着终点处吸引,所以引力场的存…
阅读更多...
路径规划算法3 改进的人工势场法(Matlab)
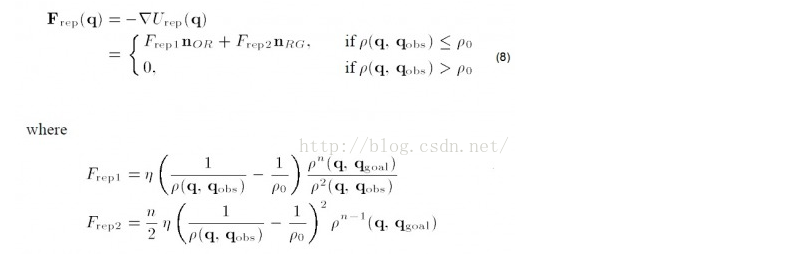
目录 传统人工势场 引力势场 斥力势场 合力势场 传统人工势场法存在的问题 改进的人工势场函数 Matlab代码实现 参考链接: [1]朱伟达. 基于改进型人工势场法的车辆避障路径规划研究[D]. 江苏大学, 2017. 1986年Khatib首先提出人工势场法,并将其应用在…
阅读更多...
【控制】人工势场法及人工势场函数
目录 人工势场法-维基百科路径规划-人工势场法(Artifical Potential Field)引力场 (attractive/gravitation field)斥力场 (repulsive field)总场 【机器人路径规划】人工势场法PaperMatlab 代码自己编写的 Matlab1. 仅考虑引力的情况 人工势场法-维基百…
阅读更多...
移动机器人路径规划:人工势场法
人工势场法是一种原理比较简单的移动机器人路径规划算法,它将目标点位置视做势能最低点,将地图中的障碍物视为势能高点,计算整个已知地图的势场图,然后理想情况下,机器人就像一个滚落的小球,自动避开各个障…
阅读更多...
人工势场法matlab讲解_【机器人路径规划】人工势场法
阅读本文需要的基础知识为: 理解机器人的构型空间。建议阅读:机器人运动规划中的C space怎样理解?为什么不直接在笛卡尔坐标系下运算呢? 本文的实现程序与使用说明见我的学习工具箱:小明工坊:【个人开源】机器人运动规划学习工具箱使用说明 基本原理 1.概述 我们打两个比…
阅读更多...
推荐文章
Chat GPT是什么?初学怎么使用Chat GPT?
快播公司已破产注销;ChatGPT 之父警告:AI 可能灭绝人类;苹果官方:618 将开启全球首次直播|极客头条...
时至 2023 年,2000 万行仍然是 MySQL 表的软限制吗?
带你快速了解OpenAI ChatGPT系统
[chatGPT问题解决]An error occurred. If this issue persists please contact us through our help center at
ChatGPT的奇妙人格
uniapp 离线打包 添加文件读写权限
python 文件读写操作总结
Linux监控文件读写
C#文件读写操作 [详细]
Qml读写文件
文件读写基本流程