在进行归纳推理时,如果逐个考察了某类事件的所有可能情况,因而得出一般结论,那么这结论是可靠的,这种归纳方法叫做枚举算法
一、基本概念和算法
枚举算法简称枚举法,也称为列举法、穷举法,是暴力策略的具体体现,又称为蛮力法。
枚举法的基本思想是:逐一列举问题所涉及的所有情形,并根据问题提出的条件检验哪些是问题的解,哪些应予排除。
- 枚举的意义
1) 可以充分利用计算机的速度,解决一些常见问题
2) 如果问题的规模不大,使用枚举,运算速度是可以接收的。
3) 枚举可作为某类问题时间性能的底线,用来引出同样问题的更高效率的算法。
- 枚举的实施步骤(算法)
1) 根据问题的具体情况确定枚举量(简单变量或数组)
2) 根据问题的具体清空确定枚举范围,设置枚举循环
3) 根据问题的具体要求确定筛选(约束)条件
4) 设计枚举程序并运行、调试,对运行结果进行分析与讨论。
二、判断阿姆斯特朗数
例1 求三到十位的“阿姆斯特朗数”。
所谓“阿姆斯特朗数”是指一个三位数及以上的数,其各位数字的位数次方和等于其本身。例如:153是一个阿姆斯特朗数,因为
。
472335975是一个阿姆斯特朗数,因为
其中不同位数的阿姆斯特朗数也有别名,如三位的阿姆斯特朗数也叫“水仙花数”,七位的阿姆斯特朗数也叫“北斗七星数”等。
那么这道题的取值范围即100-10000000000(,不含),条件限制为各位数字的位数次方和等于其本身。
如何取各位数字?
可用整除、取余获取各位数字,但位数不定不好处理,故可以转化为字符串,求长度(次方数),取字符串元数(每一位数)。
数值转为字符串的语法格式为:
str(数值表达式)
转换后,正数不含符号位,字符串为序列,每个字符为元素。
f格式化字符串:f-string采用{content:format}设置字符串格式,其中content是替换并填入字符串的内容,可以是变量、表达式或函数等,format是格式描述符。采用默认格式时不必指定 “:format”。其语法格式为:
f'{字符串/变量:格式}'
其中:大括号前、后:可以放任何字符串,它们将直接显示在结果中;大括号内:目标字符串+目标格式;冒号前:需要格式化的原始字符串或变量,冒号后:需要的目标格式(缺省用默认格式)
完整程序如下:
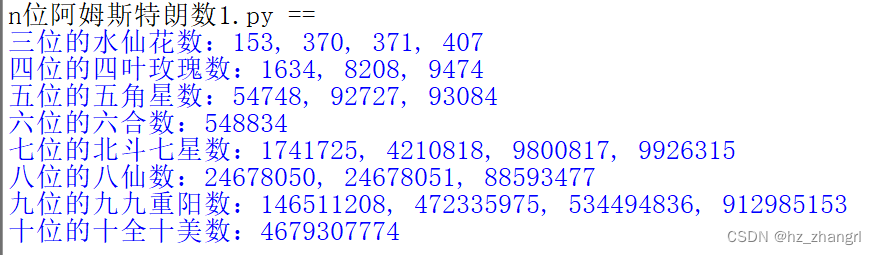
for i in range(100,10**10): # 不含10**10,终值为9999999999s = 0 # 求和初值取“0”n = len(str(i)) # 获取数值i的位数for j in str(i): # str(123)='123',则j='1','2','3's += int(j) ** n # 求各位数的n次方和if s == i: # n位阿姆斯特朗数的判断条件print(f'{n}位阿姆斯特朗数:', i)执行结果:

此程序虽然简单,但输出效果不是很理想,同样位数的阿姆斯特朗数没有显示在同一行中。此程序涉及100亿次的10位100亿次方数和运算,所以会耗费数小时(7位前耗时数秒,8位前耗时1~2分,9位前耗时数10~30分)
下面对程序进行改进,将不同位数的阿姆斯特朗数标上“别名”,并将相同位数的阿姆斯特朗数显示在同一行中,但耗时基本不变。下面的程序中用到了三元表达式。
三元表达式又称三元运算符,Python中三元表达式的语法格式为:
表达式1 if 条件表达式 else 表达式2
当“条件表达式”为True时,返回结果为“表达式1”,否则返回结果为“表达式2”。
获取字典“键”的列表的语法格式为:
list(字典.keys())
完整程序如下:
ArmstrongNum = {'三':'水仙花','四':'四叶玫瑰','五':'五角星','六':'六合','七':'北斗七星','八':'八仙','九':'九九重阳','十':'十全十美'}
for i in range(2,10):print(f'{list(ArmstrongNum.keys())[i-2]}位的'f'{ArmstrongNum[list(ArmstrongNum.keys())[i-2]]}数:', end='')m = 0for j in range(10**i, 10**(i+1)): # 1后跟i个0到 i+1个9n = len(str(j)) # n = i + 1,数值j的位数s = 0for k in str(j): # str(123)='123',k='1','2','3's += int(k) ** n # 求各位的n次方和if s == j: # n位阿姆斯特朗数的判断条件print(j if m==0 else f', {j}', end='')m += 1print()执行结果:
三、解百鸡问题
我国古代数学家张丘建在《算经》一书中提出的数学问题:鸡翁一值钱五,鸡母一值钱三,鸡雏三值钱一。百钱买百鸡,问鸡翁、鸡母、鸡雏各几何?
例2 百鸡问题:(白话文翻译)有一个人有一百个钱,打算买一百只鸡。到市场一看,公鸡五个钱一只,母鸡三个钱一只,小鸡一个钱三只,怎么样买法,才能刚好用一百个钱买一百只鸡?。现在,请你编一程序,帮他计划一下。
注意:鸡都是整只的,钱总数也是整数。因为买公鸡和母鸡花费的钱为整数,所以买小鸡的钱也必须是整数,因此小鸡数为3的倍数。
设公鸡数为rooster,母鸡数为hen,则小鸡数为
chicken = 100-rooster-hen
一百个钱最多买20只公鸡,一百个钱最多买33只母鸡。具体程序代码如下:
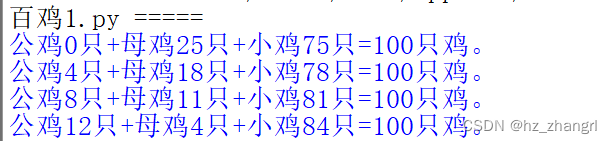
for rooster in range(21): # 公鸡0~20,不包含21for hen in range(34): # 母鸡0~33,不包含34chicken = 100-rooster-hen # 求小鸡数if rooster * 5 + hen * 3 + chicken/3 == 100:print(f'公鸡{rooster}只+母鸡{hen}只+小鸡{chicken}只=100只鸡。')
输出结果为:
程序优化:
思路:设公鸡数为x,母鸡数为y,小鸡数为z,则
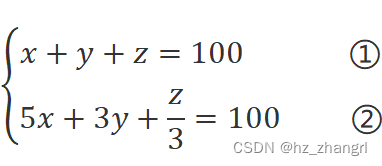
两方程三变量,不能直接求解,属不定方程。
程序每使用一个for(x)循环,就相当于将一个未知数(x)变成已知数(x), 两个方程两个未知数,方程就具有可解性了,这样就可以, 继续减少一个循环的嵌套。则解方程①②得
可用一个循环求解问题。
for x in range(21): # 0~20,不包含21。公鸡数不会超过20y = int(25-7*x/4) if 25 >= 7*x/4 else 0 # 先求y(母鸡数为整数且大于等于0)z = 100-x-y # 再求zif x * 5 + y * 3 + z / 3 == 100:print(f'公鸡{x}只+母鸡{y}只+小鸡{z}只=100只鸡。')
输出结果为: