目录
- 人工势场法-维基百科
- 路径规划-人工势场法(Artifical Potential Field)
- 引力场 (attractive/gravitation field)
- 斥力场 (repulsive field)
- 总场
- 【机器人路径规划】人工势场法
- Paper
- Matlab 代码
- 自己编写的 Matlab
- 1. 仅考虑引力的情况
人工势场法-维基百科
人工势场法是由Khatib提出的一种机器人路径规划算法。该算法将目标和障碍物分别看做对机器人有引力和斥力的物体,机器人沿引力与斥力的合力来进行运动。
该法结构简单,便于低层的实时控制,在实时避障和平滑的轨迹控制方面,得到了广泛应用,其不足在于存在局部最优解,容易产生死锁现象,因而可能使移动机器人在到达目标点之前就停留在局部最优点。
From: 人工势场法-维基百科
路径规划-人工势场法(Artifical Potential Field)
引力场 (attractive/gravitation field)
常用的引力函数:
U a t t ( q ) = 1 2 ξ ρ 2 ( q , q g o a l ) U_{att}(q) = \frac{1}{2}\xi\rho^2(q,q_{goal}) Uatt(q)=21ξρ2(q,qgoal)
这里的 ξ \xi ξ 是尺度因子, ρ ( q , q g o a l ) \rho(q,q_{goal}) ρ(q,qgoal) 表示物体当前状态与目标的距离。引力场有了,那么引力就是引力场对距离的导数(类比物理里面 W = F X W=FX W=FX):
F a t t ( q ) = − ∇ U a t t ( q ) = ξ ( q g o a l − q ) F_{att}(q) = -\nabla U_{att}(q) = \xi(q_{goal}-q) Fatt(q)=−∇Uatt(q)=ξ(qgoal−q)
斥力场 (repulsive field)
传统的斥力场公式
U r e p ( q ) = { 1 2 η ( 1 ρ ( q , q o b s ) − 1 ρ 0 ) 2 , if ρ ( q , q o b s ) ≤ ρ 0 0 , if ρ ( q , q o b s ) > ρ 0 U_{rep}(q) = \left\{\begin{aligned} \frac{1}{2} \eta (\frac{1}{\rho(q, q_{obs})} - \frac{1}{\rho_0})^2, \quad \text{if}\ \rho(q, q_{obs}) \le \rho_0 \\ 0,\quad \text{if}\ \rho(q, q_{obs}) > \rho_0 \end{aligned}\right. Urep(q)=⎩⎪⎨⎪⎧21η(ρ(q,qobs)1−ρ01)2,if ρ(q,qobs)≤ρ00,if ρ(q,qobs)>ρ0
其中,
η \eta η 是斥力尺度因子,
ρ ( q , q o b s ) \rho(q, q_{obs}) ρ(q,qobs) 代表物体和障碍物之间的距离。
ρ 0 \rho_0 ρ0 代表每个障碍物的影响半径。
换言之,离开一定的距离,障碍物就对物体没有斥力影响。
斥力就是斥力场的梯度
F r e p ( q ) = − ∇ U r e p ( q ) = { η ( 1 ρ ( q , q o b s ) − 1 ρ 0 ) ⋅ 1 ρ 2 ( q , q o b s ) ∇ ρ ( q , q o b s ) , if ρ ( q , q o b s ) ≤ ρ 0 0 , if ρ ( q , q o b s ) > ρ 0 \begin{aligned}F_{rep}(q) &= -\nabla U_{rep}(q)\\ &= \left\{\begin{aligned} &\eta (\frac{1}{\rho(q, q_{obs})} - \frac{1}{\rho_0}) \\ & \cdot \frac{1}{\rho^2(q,q_{obs})}\nabla\rho(q,q_{obs}),\quad & \text{if}\ \rho(q, q_{obs}) \le \rho_0 \\ & 0,\quad & \text{if}\ \rho(q, q_{obs}) > \rho_0 \end{aligned}\right.\end{aligned} Frep(q)=−∇Urep(q)=⎩⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎧η(ρ(q,qobs)1−ρ01)⋅ρ2(q,qobs)1∇ρ(q,qobs),0,if ρ(q,qobs)≤ρ0if ρ(q,qobs)>ρ0
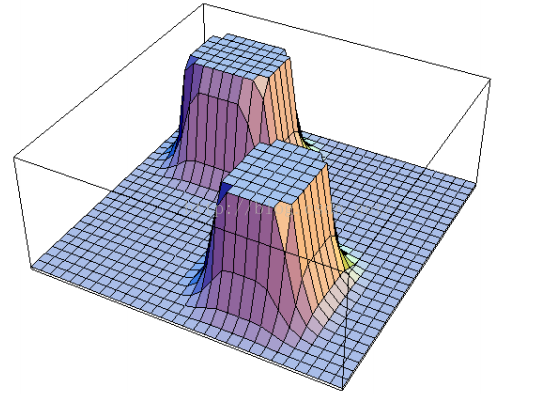
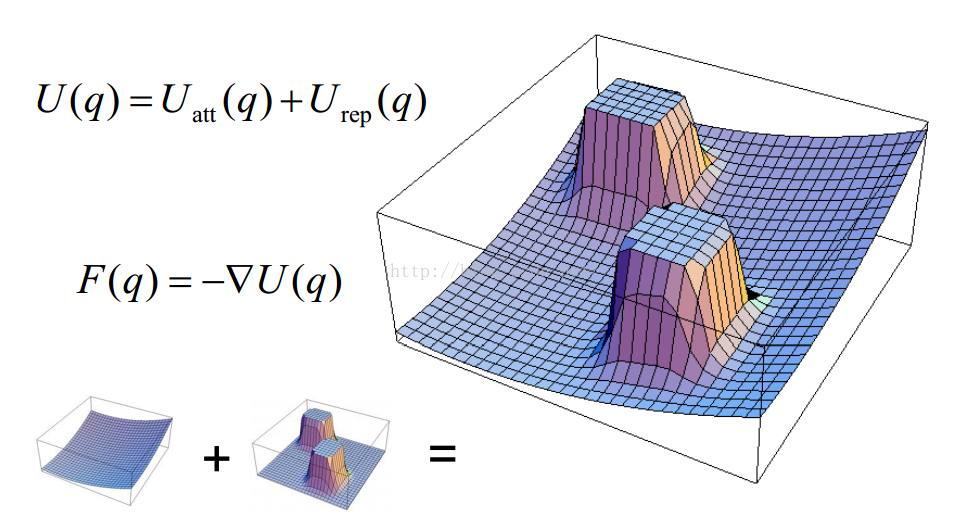
总场
总的场就是斥力场合引力场的叠加,也就是 U = U a t t + U r e p U=U_{att}+U_{rep} U=Uatt+Urep,总的力也是对对应的分力的叠加,如下图所示:
From: 路径规划-人工势场法(Artifical Potential Field)
【机器人路径规划】人工势场法
1.概述
我们打两个比方来说明人工势场法的作用机理。首先,我们把构型空间比作一个电势场平面,机器人(的当前构型)比作空间中一点。如果让机器人的起点和障碍物带正电荷,终点带负电荷,机器人带正电荷。由于同性电荷相斥,异性电荷相吸的原理,机器人将会在电场力的作用下沿着某条路径向终点移动 ,并避开带正电荷的障碍物,如图1所示。

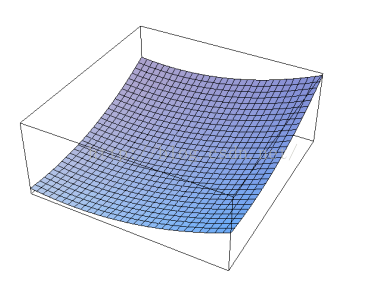
类似的,我们也可以把构型空间比作一个有起伏地形的区域。其中,起点和障碍物位于较高的区域,终点位于较低的区域,机器人视作一个球体。那么在重力的作用下,机器人将沿着某条轨迹从较高的起点滑落到较低的终点,并避开较高的障碍物。如图2[2]所示。

以上的两个例子其实就是电势场与重力势场的作用机制,电势场和重力势场都是自然势场。而人工势场法就是在已知起点、终点和障碍物位置的情况下,构建一个人工势场来模仿这种作用机制。人工势场法的优点在于,它其实是一种反馈控制策略,对控制和传感误差有一定的鲁棒性;缺点在于存在局部极小值问题,因此不能保证一定能找到问题的解。
From: 【机器人路径规划】人工势场法
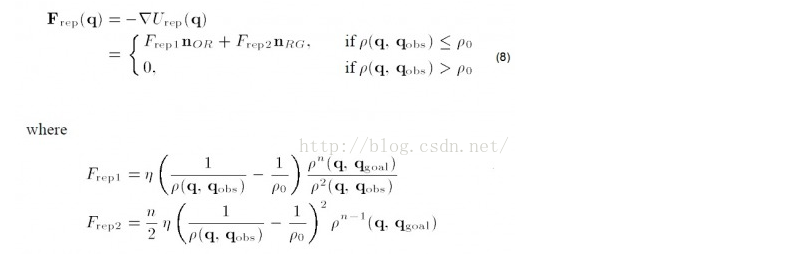
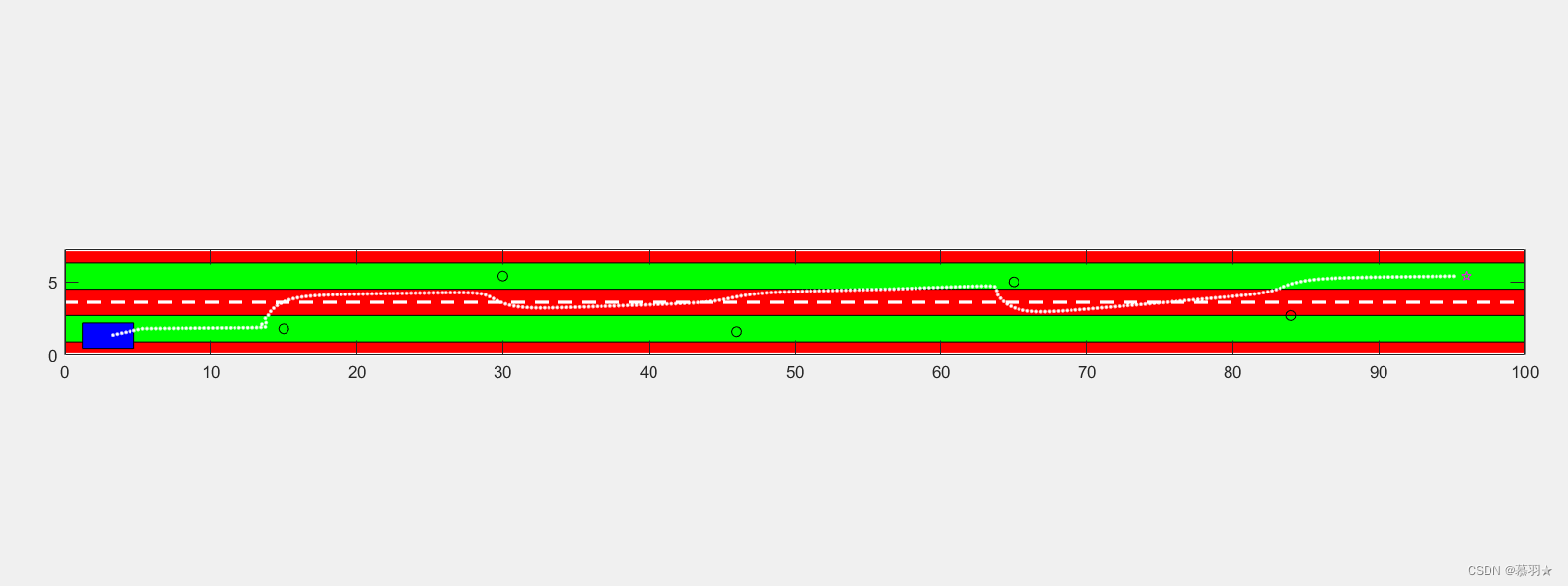
Paper
M. Zhang, Y. Shen, Q. Wang and Y. Wang, “Dynamic artificial potential field based multi-robot formation control,” 2010 IEEE Instrumentation & Measurement Technology Conference Proceedings, 2010, pp. 1530-1534, doi: 10.1109/IMTC.2010.5488238.




close all;cleardensity = 0.2;
Grid_X = 0:density:10;
Grid_Y = 0:density:10;
Basic_Z = ones(length(Grid_X), length(Grid_Y));P0 = 20;
a = 20; %斥力影响因素
b = 10; %引力影响因素Goal = [10,10]; %目标
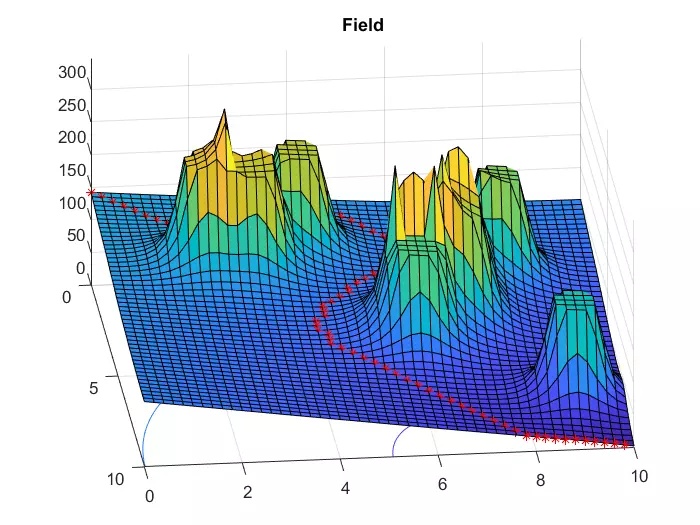
Obs = [ 3, 2;3, 3;5, 7;5.3, 6;6, 6;2, 4;3, 8;4, 7;8, 9]; %障碍物坐标
for k1 = 1: length(Grid_X)for k2 =1:length(Grid_Y)X_c = Grid_X(k1);Y_c = Grid_Y(k2);rre =[];rat = sqrt((Goal(1)-X_c)^2 +(Goal(2)-Y_c)^2);Y_rre = [];Y_ata = [];for k3 = 1:length(Obs)rre(k3) = sqrt((Obs(k3,1)-X_c)^2 +(Obs(k3,2)-Y_c)^2);Y_rre(k3) = a*(1/rre(k3) - 1/P0 ) *1/(rre(k3)^2); %基本斥力场公式if isinf(Y_rre(k3))==1|| Y_rre(k3)>150 %为显示效果做的限制处理Y_rre = 150;endendY_ata = b*rat; %基本引力场公式,注意这里引力只有一个值Field_rre(k1,k2) = sum(Y_rre);Field_ata(k1,k2) = Y_ata;end
endSUM = Field_rre + Field_ata;
surf(Grid_X,Grid_Y,SUM) %总力场Matlab 代码
人工势场算法 Matlab版源码
自己编写的 Matlab
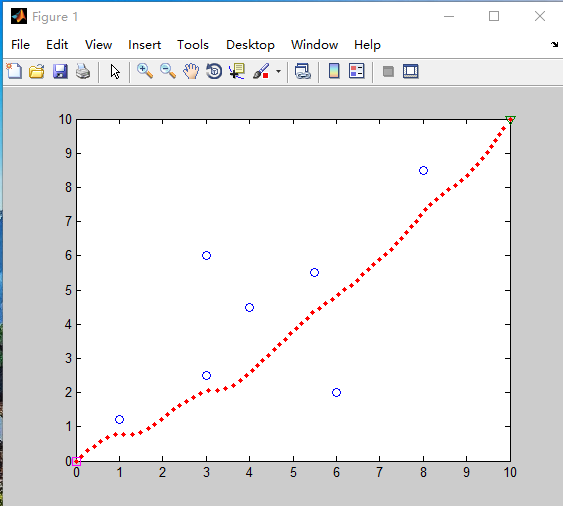
1. 仅考虑引力的情况
% 自写人工势场法测试函数
% 说明:
% X 轴:时间 time
% Y 轴:小车横坐标
% Z 轴:小车纵坐标
% 初始位置:[0 0]'
% 目标位置:[10 10]'clearP0 = [0 0]';
Pt(:,1) = P0;
PGoal = [10 10]';
Ut(:,1) = [0 0]';% 时间参数
tBegin = 0;
tEnd = 10;
dT = 0.01;
T(1,1) = tBegin;
times = (tEnd - tBegin)/dT;% 其他参数
xi = 0.8;for time=1:timesT(1,time+1) = T(1,time) + dT;% 引力FGravitation = xi * (PGoal - Pt(:,time));% 斥力FRepulsive = 0;% 合力Ut(:,time+1) = FGravitation + FRepulsive;% 更新位置Pt(:,time+1) = Pt(:,time) + dT * Ut(:,time);
endfigure(1)
plot3(T,Pt(1,:),Pt(2,:))
xlabel('Time');
ylabel('XPosition');
zlabel('YPosition');
grid onfigure(2)
plot3(T,Ut(1,:),Ut(2,:))
xlabel('Time');
ylabel('XSpeed');
zlabel('YSpeed');
grid on